 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurvey on Teleoperation Concepts for Automated Vehicles
Aug 18, 2022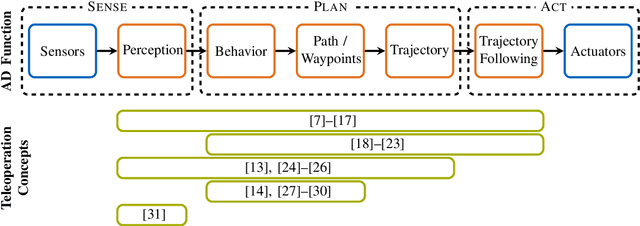
In parallel with the advancement of Automated Driving (AD) functions, teleoperation has grown in popularity over recent years. By enabling remote operation of automated vehicles, teleoperation can be established as a reliable fallback solution for operational design domain limits and edge cases of AD functions. Over the years, a variety of different teleoperation concepts as to how a human operator can remotely support or substitute an AD function have been proposed in the literature. This paper presents the results of a literature survey on teleoperation concepts for road vehicles. Furthermore, due to the increasing interest within the industry, insights on patents and overall company activities in the field of teleoperation are presented.
Steering Action-aware Adaptive Cruise Control for Teleoperated Driving
Aug 18, 2022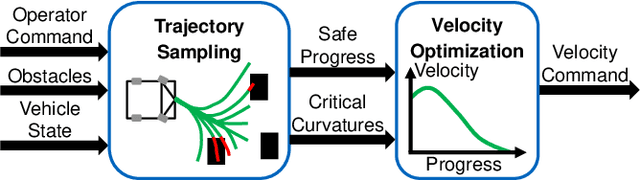


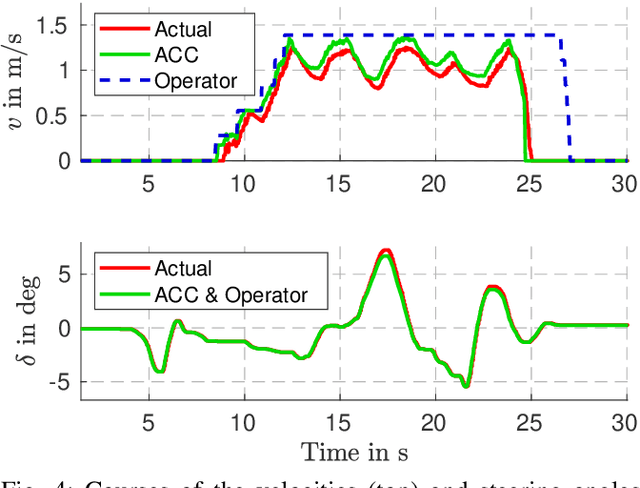
In this paper, a steering action-aware Adaptive Cruise Control (ACC) approach for teleoperated road vehicles is proposed. In order to keep the vehicle in a safe state, the ACC approach can override the human operator's velocity control commands. The safe state is defined as a state from which the vehicle can be stopped safely, no matter which steering actions are applied by the operator. This is achieved by first sampling various potential future trajectories. In a second stage, assuming the trajectory with the highest risk, a safe and comfortable velocity profile is optimized. This yields a safe velocity control command for the vehicle. In simulations, the characteristics of the approach are compared to a Model Predictive Control-based approach that is capable of overriding both, the commanded steering angle as well as the velocity. Furthermore, in teleoperation experiments with a 1:10-scale vehicle testbed, it is demonstrated that the proposed ACC approach keeps the vehicle safe, even if the control commands from the operator would have resulted in a collision.
Open Source Software for Teleoperated Driving
Sep 23, 2021


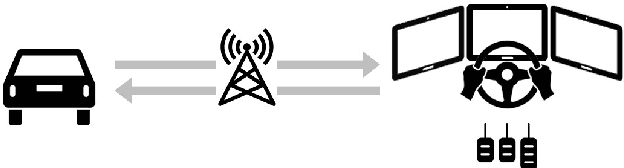
Teleoperation allows a human operator to remotely interact with and control a mobile robot in a dangerous or inaccessible area. Besides well-known applications such as space exploration or search and rescue operations, the application of teleoperation in the area of automated driving, i.e., teleoperated driving (ToD), is becoming more popular. Instead of an in-vehicle human fallback driver, a remote operator can connect to the vehicle using cellular networks and resolve situations that are beyond the automated vehicle (AV)'s operational design domain. Teleoperation of AVs, and unmanned ground vehicles in general, introduces different problems, which are the focus of ongoing research. This paper presents an open source ToD software stack, which was developed for the purpose of carrying out this research. As shown in three demonstrations, the software stack can be deployed with minor overheads to control various vehicle systems remotely.
Active Safety System for Semi-Autonomous Teleoperated Vehicles
Jun 28, 2021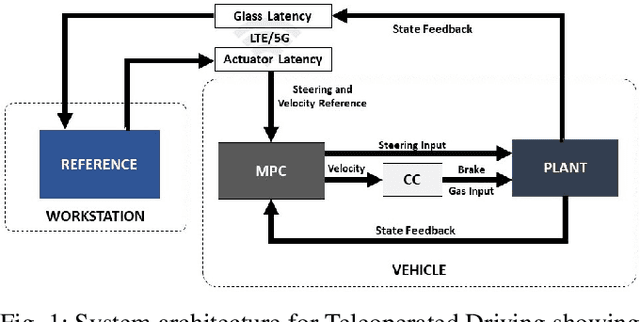
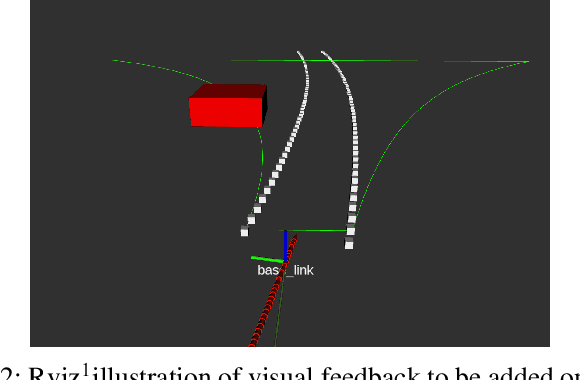
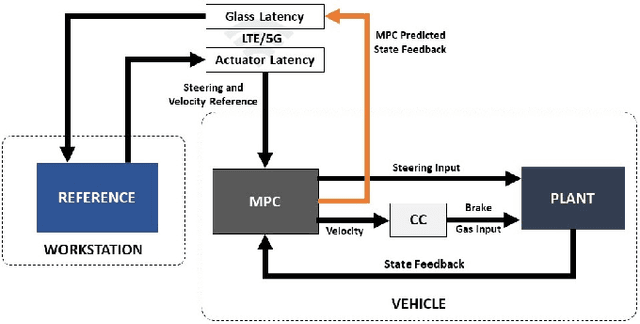

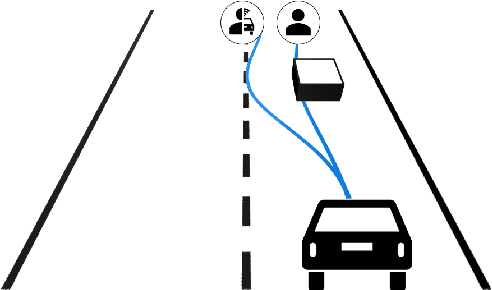
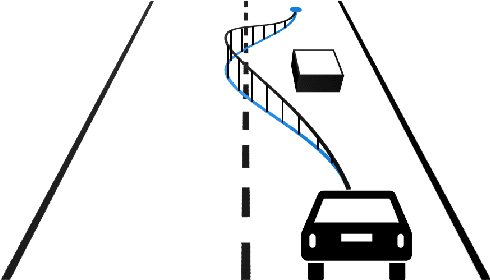
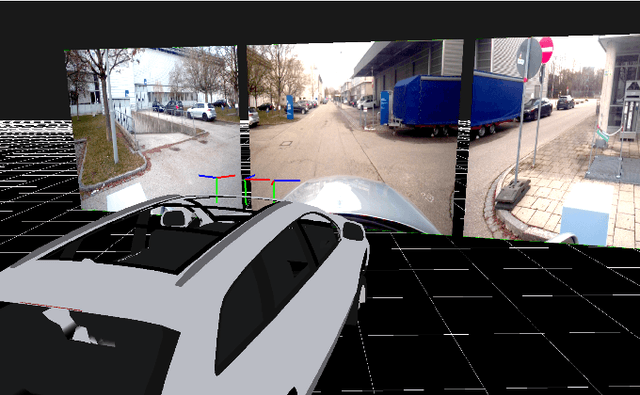
Autonomous cars can reduce road traffic accidents and provide a safer mode of transport. However, key technical challenges, such as safe navigation in complex urban environments, need to be addressed before deploying these vehicles on the market. Teleoperation can help smooth the transition from human operated to fully autonomous vehicles since it still has human in the loop providing the scope of fallback on driver. This paper presents an Active Safety System (ASS) approach for teleoperated driving. The proposed approach helps the operator ensure the safety of the vehicle in complex environments, that is, avoid collisions with static or dynamic obstacles. Our ASS relies on a model predictive control (MPC) formulation to control both the lateral and longitudinal dynamics of the vehicle. By exploiting the ability of the MPC framework to deal with constraints, our ASS restricts the controller's authority to intervene for lateral correction of the human operator's commands, avoiding counter-intuitive driving experience for the human operator. Further, we design a visual feedback to enhance the operator's trust over the ASS. In addition, we propose an MPC's prediction horizon data based novel predictive display to mitigate the effects of large latency in the teleoperation system. We tested the performance of the proposed approach on a high-fidelity vehicle simulator in the presence of dynamic obstacles and latency.
Adaptive Video Configuration and Bitrate Allocation for Teleoperated Driving
Feb 22, 2021
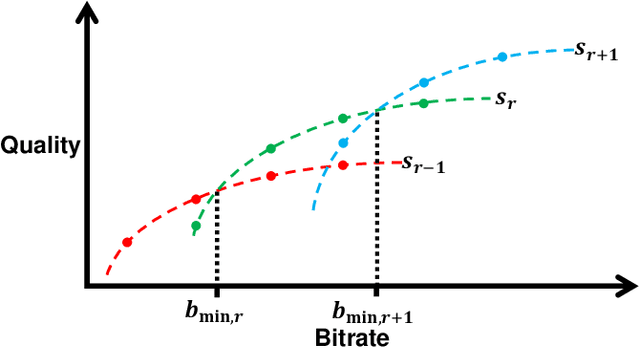
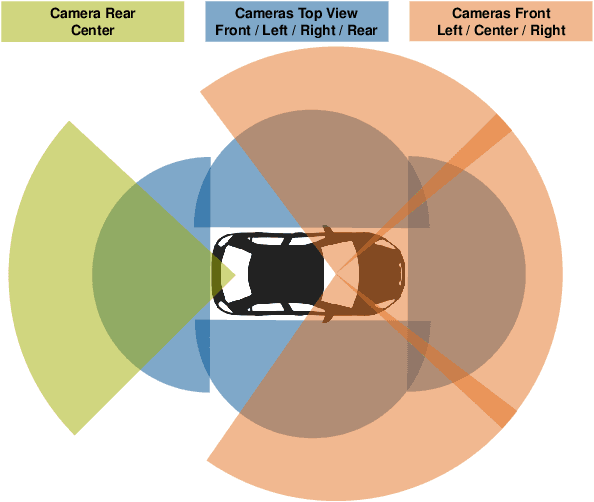

Vehicles with autonomous driving capabilities are present on public streets. However, edge cases remain that still require a human in-vehicle driver. Assuming the vehicle manages to come to a safe state in an automated fashion, teleoperated driving technology enables a human to resolve the situation remotely by a control interface connected via a mobile network. While this is a promising solution, it also introduces technical challenges, one of them being the necessity to transmit video data of multiple cameras from the vehicle to the human operator. In this paper, an adaptive video streaming framework specifically designed for teleoperated driving is proposed and demonstrated. The framework enables automatic reconfiguration of the video streams of the multi-camera system at runtime. Predictions of variable transmission service quality are taken into account. With the objective to maximize visual quality, the framework uses so-called rate-quality models to dynamically allocate bitrates and select resolution scaling factors. Results from deploying the proposed framework on an actual teleoperated driving system are presented.
Steer with Me: A Predictive, Potential Field-Based Control Approach for Semi-Autonomous, Teleoperated Road Vehicles
Jun 28, 2020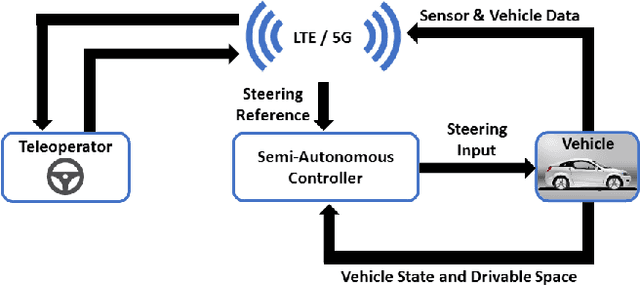
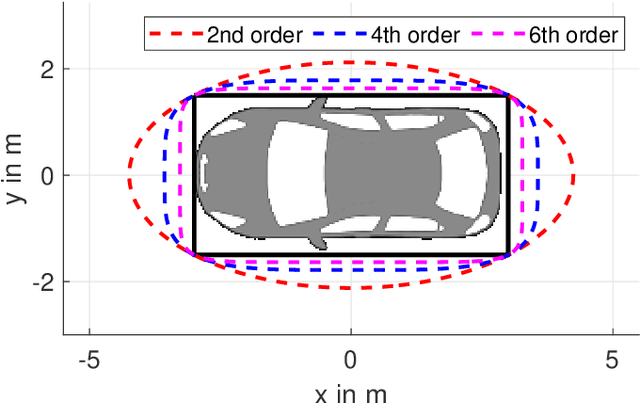
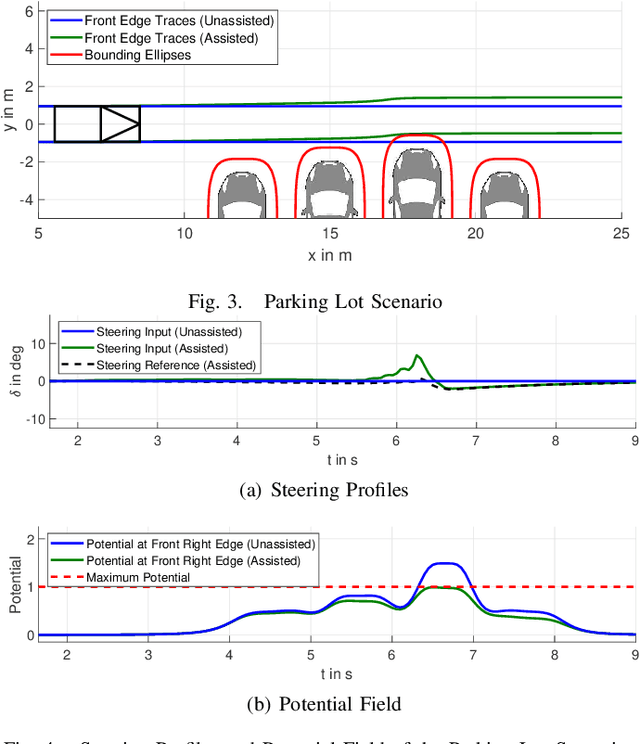
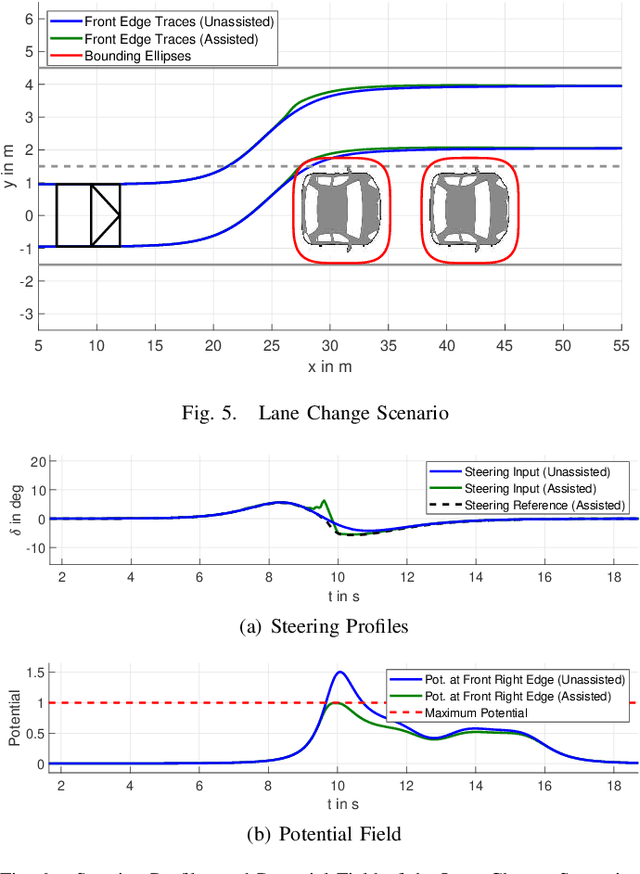
Autonomous driving is among the most promising of upcoming traffic safety technologies. Prototypes of autonomous vehicles are already being tested on public streets today. However, while current prototypes prove the feasibility of truly driverless cars, edge cases remain which necessitate falling back on human operators. Teleoperated driving is one solution that would allow a human to remotely control a vehicle via mobile radio networks. Removing in-vehicle drivers would thus allow current autonomous technologies to further progress towards becoming genuinely driverless systems. This paper proposes a new model predictive steering control scheme, specifically designed for semi-autonomous, teleoperated road vehicles. The controller is capable of receiving teleoperator steering commands and, in the case of potential collisions, automatically correcting these commands. Collision avoidance is incorporated into the design using potential fields. A term in the cost function facilitates natural maneuvers, and constraints on the maximum potential keep the vehicle at safe distances from obstacles. This paper also proposes the use of high-order ellipses as a method to accurately model rectangular obstacles in tight driving scenarios. Simulation results support the effectiveness of the proposed approach.
Building a Winning Self-Driving Car in Six Months
Nov 03, 2018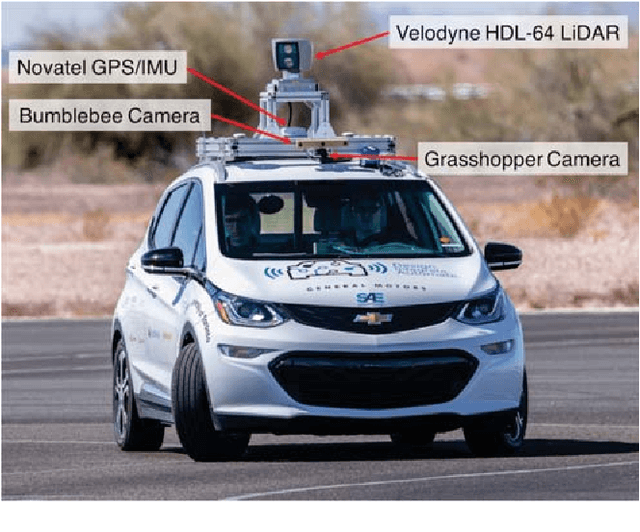
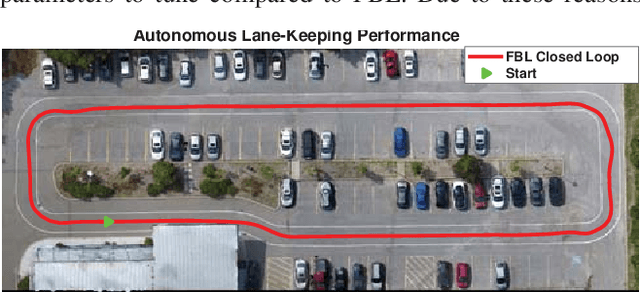
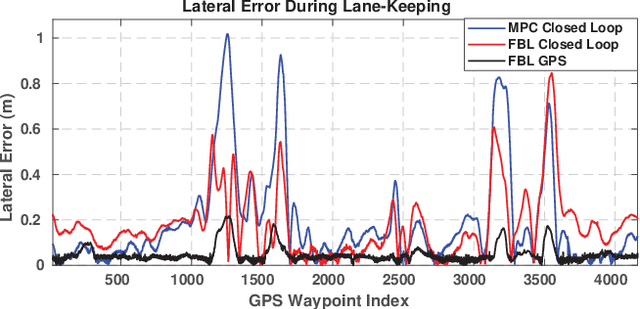
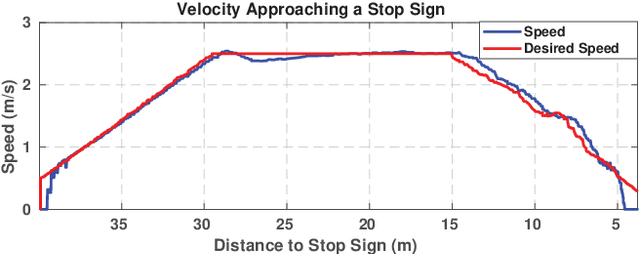
The SAE AutoDrive Challenge is a three-year competition to develop a Level 4 autonomous vehicle by 2020. The first set of challenges were held in April of 2018 in Yuma, Arizona. Our team (aUToronto/Zeus) placed first. In this paper, we describe our complete system architecture and specialized algorithms that enabled us to win. We show that it is possible to develop a vehicle with basic autonomy features in just six months relying on simple, robust algorithms. We do not make use of a prior map. Instead, we have developed a multi-sensor visual localization solution. All of our algorithms run in real-time using CPUs only. We also highlight the closed-loop performance of our system in detail in several experiments.