 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSteer with Me: A Predictive, Potential Field-Based Control Approach for Semi-Autonomous, Teleoperated Road Vehicles
Paper and Code
Jun 28, 2020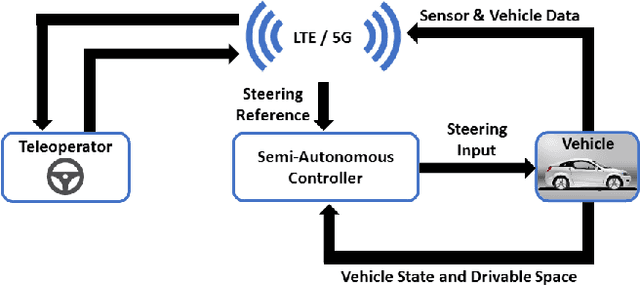
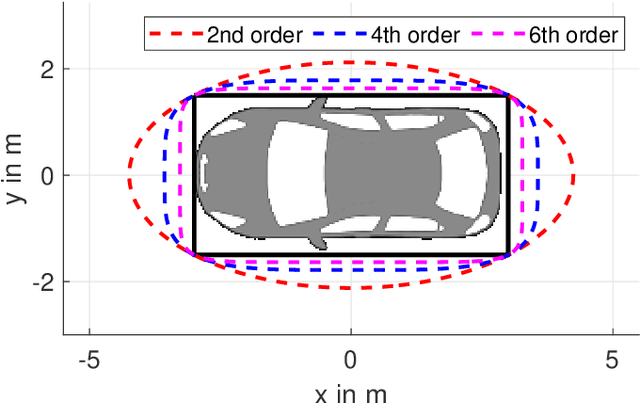
Autonomous driving is among the most promising of upcoming traffic safety technologies. Prototypes of autonomous vehicles are already being tested on public streets today. However, while current prototypes prove the feasibility of truly driverless cars, edge cases remain which necessitate falling back on human operators. Teleoperated driving is one solution that would allow a human to remotely control a vehicle via mobile radio networks. Removing in-vehicle drivers would thus allow current autonomous technologies to further progress towards becoming genuinely driverless systems. This paper proposes a new model predictive steering control scheme, specifically designed for semi-autonomous, teleoperated road vehicles. The controller is capable of receiving teleoperator steering commands and, in the case of potential collisions, automatically correcting these commands. Collision avoidance is incorporated into the design using potential fields. A term in the cost function facilitates natural maneuvers, and constraints on the maximum potential keep the vehicle at safe distances from obstacles. This paper also proposes the use of high-order ellipses as a method to accurately model rectangular obstacles in tight driving scenarios. Simulation results support the effectiveness of the proposed approach.