 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgevEDGAR -- Can CARLA Do HiL?
Dec 09, 2025Simulation offers advantages throughout the development process of automated driving functions, both in research and product development. Common open-source simulators like CARLA are extensively used in training, evaluation, and software-in-the-loop testing of new automated driving algorithms. However, the CARLA simulator lacks an evaluation where research and automated driving vehicles are simulated with their entire sensor and actuation stack in real time. The goal of this work is therefore to create a simulation framework for testing the automation software on its dedicated hardware and identifying its limits. Achieving this goal would greatly benefit the open-source development workflow of automated driving functions, designating CARLA as a consistent evaluation tool along the entire development process. To achieve this goal, in a first step, requirements are derived, and a simulation architecture is specified and implemented. Based on the formulated requirements, the proposed vEDGAR software is evaluated, resulting in a final conclusion on the applicability of CARLA for HiL testing of automated vehicles. The tool is available open source: Modified CARLA fork: https://github.com/TUMFTM/carla, vEDGAR Framework: https://github.com/TUMFTM/vEDGAR
Human-Aided Trajectory Planning for Automated Vehicles through Teleoperation and Arbitration Graphs
Feb 04, 2025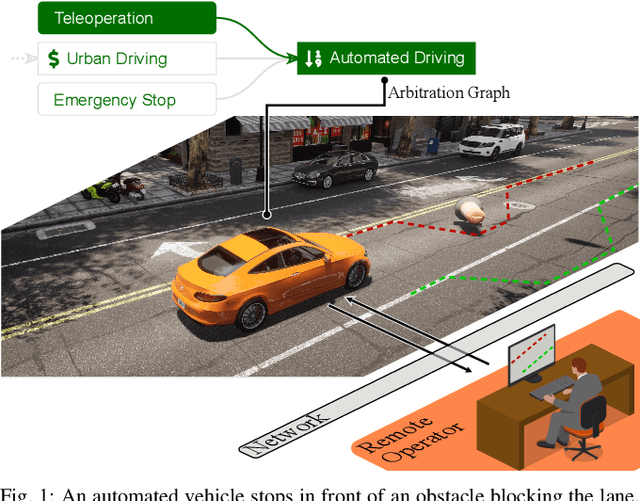

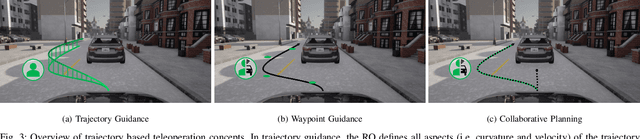
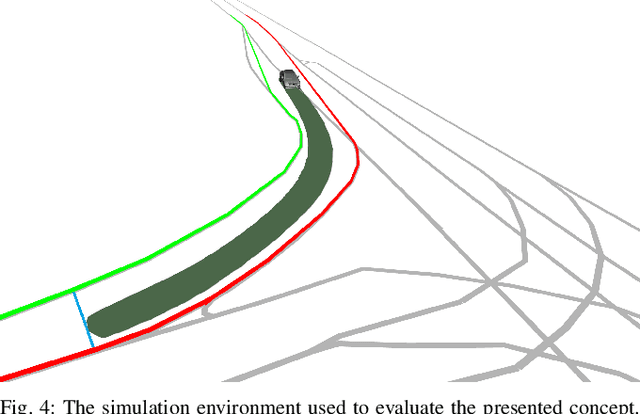
Teleoperation enables remote human support of automated vehicles in scenarios where the automation is not able to find an appropriate solution. Remote assistance concepts, where operators provide discrete inputs to aid specific automation modules like planning, is gaining interest due to its reduced workload on the human remote operator and improved safety. However, these concepts are challenging to implement and maintain due to their deep integration and interaction with the automated driving system. In this paper, we propose a solution to facilitate the implementation of remote assistance concepts that intervene on planning level and extend the operational design domain of the vehicle at runtime. Using arbitration graphs, a modular decision-making framework, we integrate remote assistance into an existing automated driving system without modifying the original software components. Our simulative implementation demonstrates this approach in two use cases, allowing operators to adjust planner constraints and enable trajectory generation beyond nominal operational design domains.
Integrating End-to-End and Modular Driving Approaches for Online Corner Case Detection in Autonomous Driving
Sep 02, 2024



Online corner case detection is crucial for ensuring safety in autonomous driving vehicles. Current autonomous driving approaches can be categorized into modular approaches and end-to-end approaches. To leverage the advantages of both, we propose a method for online corner case detection that integrates an end-to-end approach into a modular system. The modular system takes over the primary driving task and the end-to-end network runs in parallel as a secondary one, the disagreement between the systems is then used for corner case detection. We implement this method on a real vehicle and evaluate it qualitatively. Our results demonstrate that end-to-end networks, known for their superior situational awareness, as secondary driving systems, can effectively contribute to corner case detection. These findings suggest that such an approach holds potential for enhancing the safety of autonomous vehicles.
How to Drive -- An Ability-based Description of Autonomous, Remote and Human Driving
Jun 18, 2024



The development of autonomous and remote-operated driving systems requires extensive stakeholder analyses, requirement engineering, and formalized system descriptions. This is necessary to guarantee the success of the final product after the expensive and time-consuming development phase. To integrate a formalized description of the required abilites of the system, ability graphs have been proposed in the literature. Up to this date, however, this ability graph has only been used to model less complicated driver assistance systems in the literature. This work aims to introduce the value of an ability graph-based description of complex driving systems. This is achieved by successfully demonstrating and discussing a method for constructing a holistic ability graph capable of describing the entirety of abilities required for any driving system.
Should Teleoperation Be like Driving in a Car? Comparison of Teleoperation HMIs
Apr 26, 2024


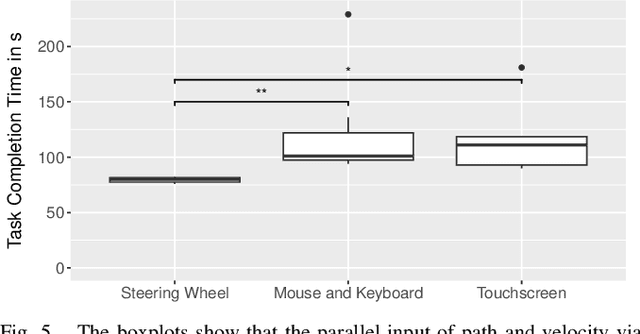
Since Automated Driving Systems are not expected to operate flawlessly, Automated Vehicles will require human assistance in certain situations. For this reason, teleoperation offers the opportunity for a human to be remotely connected to the vehicle and assist it. The Remote Operator can provide extensive support by directly controlling the vehicle, eliminating the need for Automated Driving functions. However, due to the physical disconnection to the vehicle, monitoring and controlling is challenging compared to driving in the vehicle. Therefore, this work follows the approach of simplifying the task for the Remote Operator by separating the path and velocity input. In a study using a miniature vehicle, different operator-vehicle interactions and input devices were compared based on collisions, task completion time, usability and workload. The evaluation revealed significant differences between the three implemented prototypes using a steering wheel, mouse and keyboard or a touchscreen. The separate input of path and velocity via mouse and keyboard or touchscreen is preferred but is slower compared to parallel input via steering wheel.
Evaluation of Teleoperation Concepts to solve Automated Vehicle Disengagements
Apr 23, 2024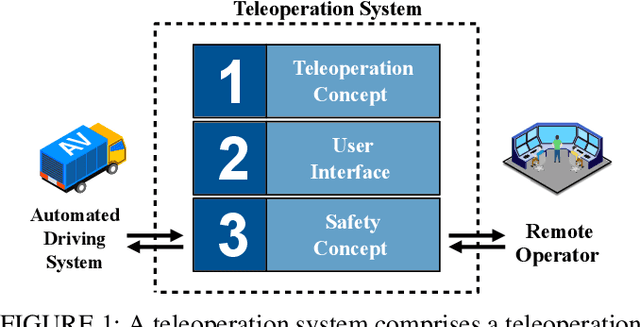
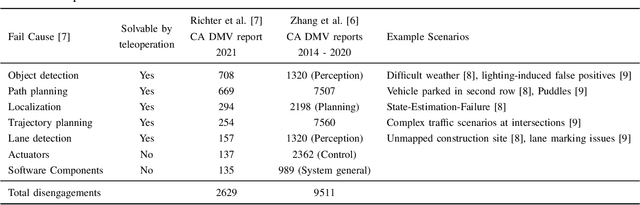
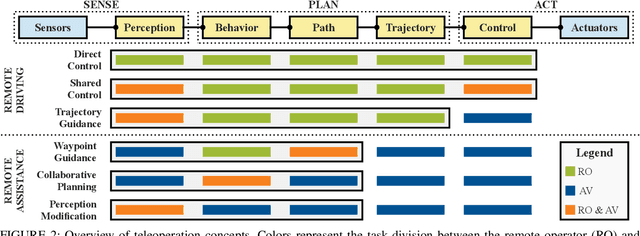

Teleoperation is a popular solution to remotely support highly automated vehicles through a human remote operator whenever a disengagement of the automated driving system is present. The remote operator wirelessly connects to the vehicle and solves the disengagement through support or substitution of automated driving functions and therefore enables the vehicle to resume automation. There are different approaches to support automated driving functions on various levels, commonly known as teleoperation concepts. A variety of teleoperation concepts is described in the literature, yet there has been no comprehensive and structured comparison of these concepts, and it is not clear what subset of teleoperation concepts is suitable to enable safe and efficient remote support of highly automated vehicles in a broad spectrum of disengagements. The following work establishes a basis for comparing teleoperation concepts through a literature overview on automated vehicle disengagements and on already conducted studies on the comparison of teleoperation concepts and metrics used to evaluate teleoperation performance. An evaluation of the teleoperation concepts is carried out in an expert workshop, comparing different teleoperation concepts using a selection of automated vehicle disengagement scenarios and metrics. Based on the workshop results, a set of teleoperation concepts is derived that can be used to address a wide variety of automated vehicle disengagements in a safe and efficient way.
CARLA-Autoware-Bridge: Facilitating Autonomous Driving Research with a Unified Framework for Simulation and Module Development
Feb 17, 2024Extensive testing is necessary to ensure the safety of autonomous driving modules. In addition to component tests, the safety assessment of individual modules also requires a holistic view at system level, which can be carried out efficiently with the help of simulation. Achieving seamless compatibility between a modular software stack and simulation is complex and poses a significant challenge for many researchers. To ensure testing at the system level with state-of-the-art AV software and simulation software, we have developed and analyzed a bridge connecting the CARLA simulator with the AV software Autoware Core/Universe. This publicly available bridge enables researchers to easily test their modules within the overall software. Our investigations show that an efficient and reliable communication system has been established. We provide the simulation bridge as open-source software at https://github.com/TUMFTM/Carla-Autoware-Bridge
Trajectory Guidance: Enhanced Remote Driving of highly-automated Vehicles
Feb 15, 2024



Despite the rapid technological progress, autonomous vehicles still face a wide range of complex driving situations that require human intervention. Teleoperation technology offers a versatile and effective way to address these challenges. The following work puts existing ideas into a modern context and introduces a novel technical implementation of the trajectory guidance teleoperation concept. The presented system was developed within a high-fidelity simulation environment and experimentally validated, demonstrating a realistic ride-hailing mission with prototype autonomous vehicles and onboard passengers. The results indicate that the proposed concept can be a viable alternative to the existing remote driving options, offering a promising way to enhance teleoperation technology and improve overall operation safety.
EDGAR: An Autonomous Driving Research Platform -- From Feature Development to Real-World Application
Sep 27, 2023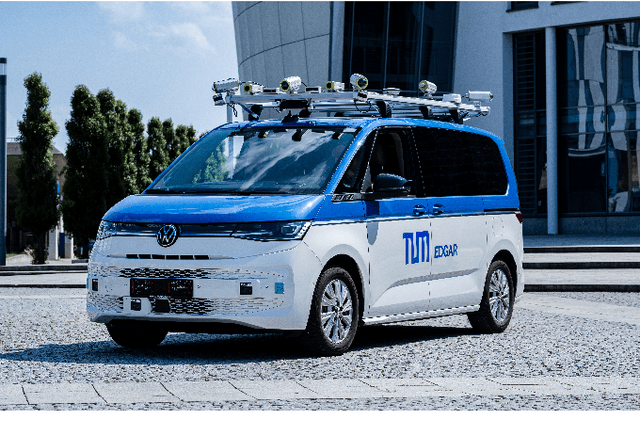
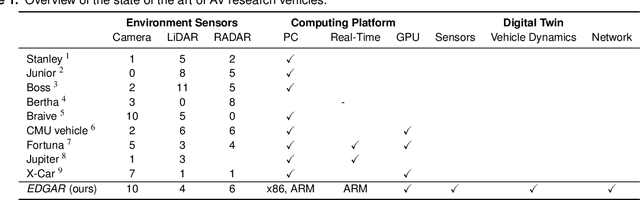

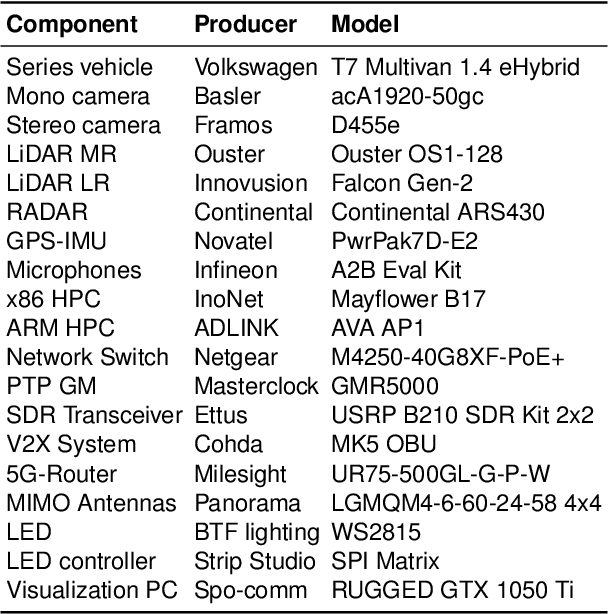
While current research and development of autonomous driving primarily focuses on developing new features and algorithms, the transfer from isolated software components into an entire software stack has been covered sparsely. Besides that, due to the complexity of autonomous software stacks and public road traffic, the optimal validation of entire stacks is an open research problem. Our paper targets these two aspects. We present our autonomous research vehicle EDGAR and its digital twin, a detailed virtual duplication of the vehicle. While the vehicle's setup is closely related to the state of the art, its virtual duplication is a valuable contribution as it is crucial for a consistent validation process from simulation to real-world tests. In addition, different development teams can work with the same model, making integration and testing of the software stacks much easier, significantly accelerating the development process. The real and virtual vehicles are embedded in a comprehensive development environment, which is also introduced. All parameters of the digital twin are provided open-source at https://github.com/TUMFTM/edgar_digital_twin.
Dynamic Collaborative Path Planning for Remote Assistance of Highly-Automated Vehicles
Aug 29, 2023


Given its increasing popularity in recent years, teleoperation technology is now recognized as a robust fallback solution for Automated Driving (AD). Remote Assistance (RA) represents an event-driven class of teleoperation with a distinct division of tasks between the Autonomous Vehicle (AV) and the remote human operator. This paper presents a novel approach for RA of AVs in urban environments. The concept draws inspiration from the potential synergy between highly-automated systems and human operators to collaboratively solve complex driving situations. Utilizing a hybrid algorithm that makes use of the Operational Design Domain (ODD) modification idea, it considers actions that go beyond the nominal operational space. Combined with the advanced cognitive reasoning of the human remote operator, the concept offers features that hold the potential to significantly improve both RA and AD user experiences.