 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrating End-to-End and Modular Driving Approaches for Online Corner Case Detection in Autonomous Driving
Sep 02, 2024



Online corner case detection is crucial for ensuring safety in autonomous driving vehicles. Current autonomous driving approaches can be categorized into modular approaches and end-to-end approaches. To leverage the advantages of both, we propose a method for online corner case detection that integrates an end-to-end approach into a modular system. The modular system takes over the primary driving task and the end-to-end network runs in parallel as a secondary one, the disagreement between the systems is then used for corner case detection. We implement this method on a real vehicle and evaluate it qualitatively. Our results demonstrate that end-to-end networks, known for their superior situational awareness, as secondary driving systems, can effectively contribute to corner case detection. These findings suggest that such an approach holds potential for enhancing the safety of autonomous vehicles.
A Containerized Microservice Architecture for a ROS 2 Autonomous Driving Software: An End-to-End Latency Evaluation
Apr 19, 2024The automotive industry is transitioning from traditional ECU-based systems to software-defined vehicles. A central role of this revolution is played by containers, lightweight virtualization technologies that enable the flexible consolidation of complex software applications on a common hardware platform. Despite their widespread adoption, the impact of containerization on fundamental real-time metrics such as end-to-end latency, communication jitter, as well as memory and CPU utilization has remained virtually unexplored. This paper presents a microservice architecture for a real-world autonomous driving application where containers isolate each service. Our comprehensive evaluation shows the benefits in terms of end-to-end latency of such a solution even over standard bare-Linux deployments. Specifically, in the case of the presented microservice architecture, the mean end-to-end latency can be improved by 5-8 %. Also, the maximum latencies were significantly reduced using container deployment.
CARLA-Autoware-Bridge: Facilitating Autonomous Driving Research with a Unified Framework for Simulation and Module Development
Feb 17, 2024



Extensive testing is necessary to ensure the safety of autonomous driving modules. In addition to component tests, the safety assessment of individual modules also requires a holistic view at system level, which can be carried out efficiently with the help of simulation. Achieving seamless compatibility between a modular software stack and simulation is complex and poses a significant challenge for many researchers. To ensure testing at the system level with state-of-the-art AV software and simulation software, we have developed and analyzed a bridge connecting the CARLA simulator with the AV software Autoware Core/Universe. This publicly available bridge enables researchers to easily test their modules within the overall software. Our investigations show that an efficient and reliable communication system has been established. We provide the simulation bridge as open-source software at https://github.com/TUMFTM/Carla-Autoware-Bridge
EDGAR: An Autonomous Driving Research Platform -- From Feature Development to Real-World Application
Sep 27, 2023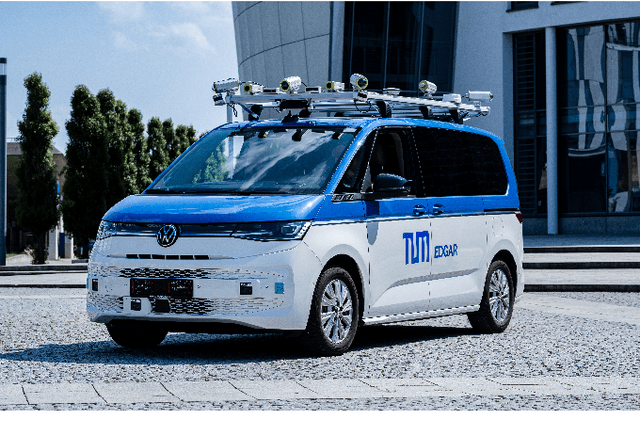
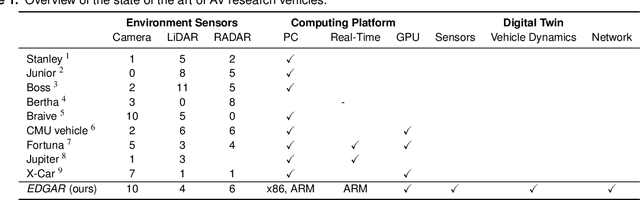

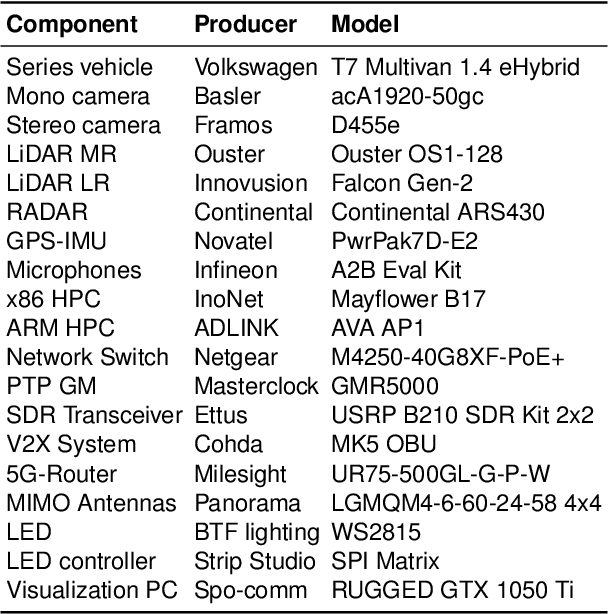
While current research and development of autonomous driving primarily focuses on developing new features and algorithms, the transfer from isolated software components into an entire software stack has been covered sparsely. Besides that, due to the complexity of autonomous software stacks and public road traffic, the optimal validation of entire stacks is an open research problem. Our paper targets these two aspects. We present our autonomous research vehicle EDGAR and its digital twin, a detailed virtual duplication of the vehicle. While the vehicle's setup is closely related to the state of the art, its virtual duplication is a valuable contribution as it is crucial for a consistent validation process from simulation to real-world tests. In addition, different development teams can work with the same model, making integration and testing of the software stacks much easier, significantly accelerating the development process. The real and virtual vehicles are embedded in a comprehensive development environment, which is also introduced. All parameters of the digital twin are provided open-source at https://github.com/TUMFTM/edgar_digital_twin.