 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEDGAR: An Autonomous Driving Research Platform -- From Feature Development to Real-World Application
Sep 27, 2023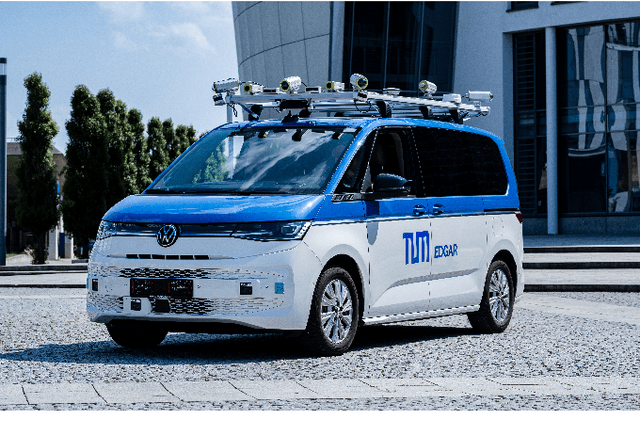
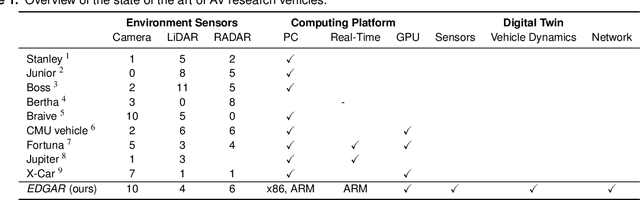

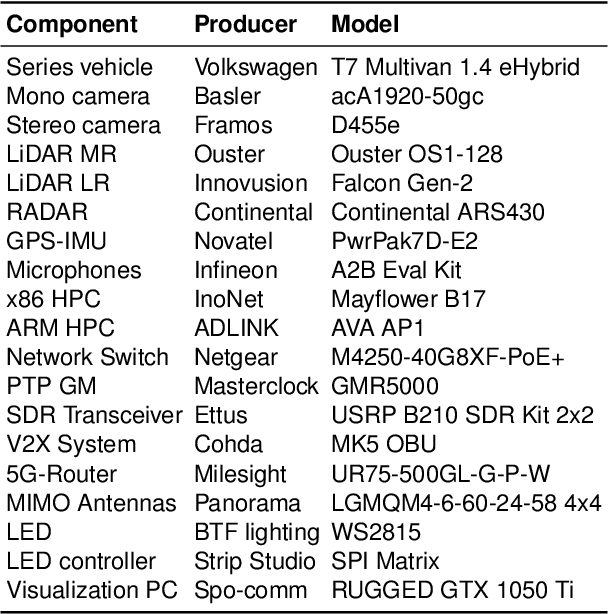
While current research and development of autonomous driving primarily focuses on developing new features and algorithms, the transfer from isolated software components into an entire software stack has been covered sparsely. Besides that, due to the complexity of autonomous software stacks and public road traffic, the optimal validation of entire stacks is an open research problem. Our paper targets these two aspects. We present our autonomous research vehicle EDGAR and its digital twin, a detailed virtual duplication of the vehicle. While the vehicle's setup is closely related to the state of the art, its virtual duplication is a valuable contribution as it is crucial for a consistent validation process from simulation to real-world tests. In addition, different development teams can work with the same model, making integration and testing of the software stacks much easier, significantly accelerating the development process. The real and virtual vehicles are embedded in a comprehensive development environment, which is also introduced. All parameters of the digital twin are provided open-source at https://github.com/TUMFTM/edgar_digital_twin.
Modeling and Testing Multi-Agent Traffic Rules within Interactive Behavior Planning
Sep 29, 2020Autonomous vehicles need to abide by the same rules that humans follow. Some of these traffic rules may depend on multiple agents or time. Especially in situations with traffic participants that interact densely, the interactions with other agents need to be accounted for during planning. To study how multi-agent and time-dependent traffic rules shall be modeled, a framework is needed that restricts the behavior to rule-conformant actions during planning, and that can eventually evaluate the satisfaction of these rules. This work presents a method to model the conformance to traffic rules for interactive behavior planning and to test the ramifications of the traffic rule formulations on metrics such as collision, progress, or rule violations. The interactive behavior planning problem is formulated as a dynamic game and solved using Monte Carlo Tree Search, for which we contribute a new method to integrate history-dependent traffic rules into a decision tree. To study the effect of the rules, we treat it as a multi-objective problem and apply a relaxed lexicographical ordering to the vectorized rewards. We demonstrate our approach in a merging scenario. We evaluate the effect of modeling and combining traffic rules to the eventual compliance in simulation. We show that with our approach, interactive behavior planning while satisfying even complex traffic rules can be achieved. Moving forward, this gives us a generic framework to formalize traffic rules for autonomous vehicles.
Formalizing Traffic Rules for Machine Interpretability
Jul 01, 2020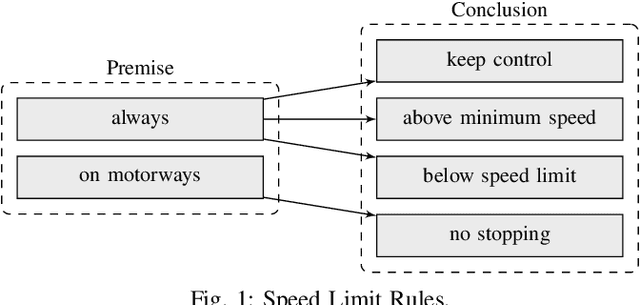
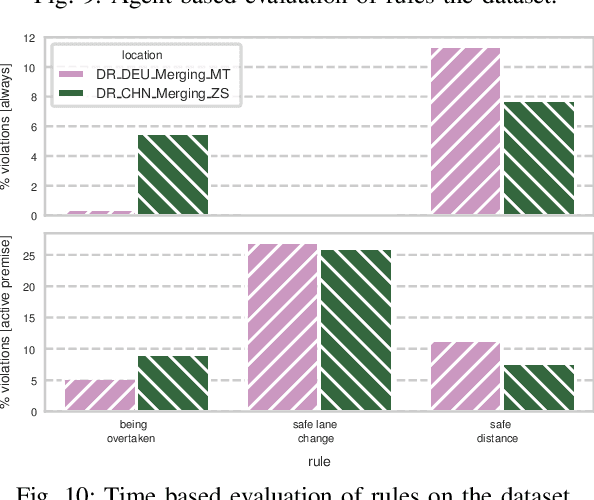
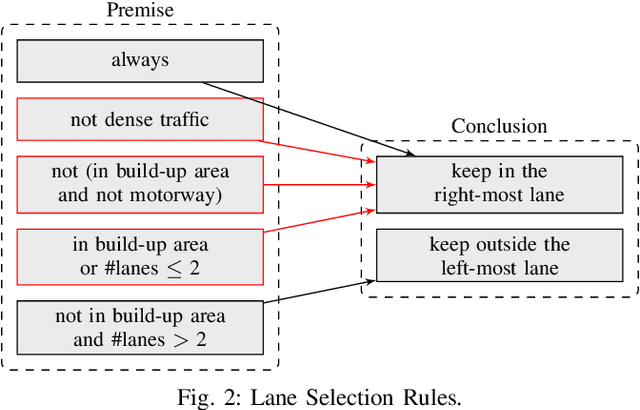
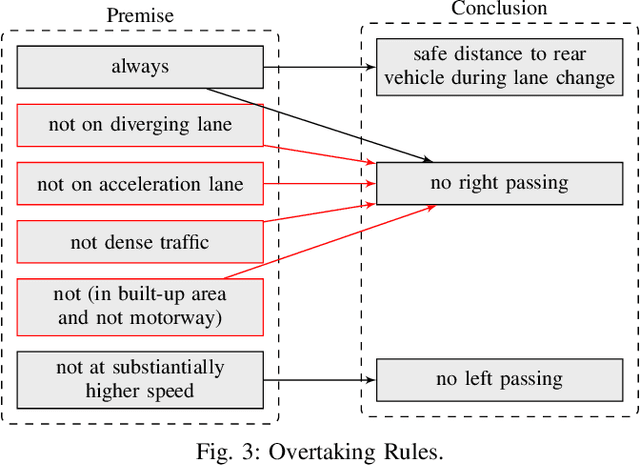
Autonomous vehicles need to be designed to abide by the same rules that humans follow. This is challenging, as traffic rules are fuzzy and not specified at a level of detail to be comprehensible for machines. Without proper formalization, satisfaction cannot be implemented in a planning component, nor can it be monitored and verified during simulation or testing. However, no work has provided a complete set of machine-interpretable traffic rules for a given operational driving domain. We propose a methodology on how to legally analyze and formalize traffic rules in a formal language. We use Linear Temporal Logic as a formal specification language to describe temporal behavior, thus capable of capturing a wide range of traffic rules. We contribute a formalized set of traffic rules for single-direction carriageways, such as on highways. We then test the effectiveness of our formalized rules on a public dataset.