 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTo New Beginnings: A Survey of Unified Perception in Autonomous Vehicle Software
Aug 28, 2025Autonomous vehicle perception typically relies on modular pipelines that decompose the task into detection, tracking, and prediction. While interpretable, these pipelines suffer from error accumulation and limited inter-task synergy. Unified perception has emerged as a promising paradigm that integrates these sub-tasks within a shared architecture, potentially improving robustness, contextual reasoning, and efficiency while retaining interpretable outputs. In this survey, we provide a comprehensive overview of unified perception, introducing a holistic and systemic taxonomy that categorizes methods along task integration, tracking formulation, and representation flow. We define three paradigms -Early, Late, and Full Unified Perception- and systematically review existing methods, their architectures, training strategies, datasets used, and open-source availability, while highlighting future research directions. This work establishes the first comprehensive framework for understanding and advancing unified perception, consolidates fragmented efforts, and guides future research toward more robust, generalizable, and interpretable perception.
Cal or No Cal? -- Real-Time Miscalibration Detection of LiDAR and Camera Sensors
Mar 31, 2025The goal of extrinsic calibration is the alignment of sensor data to ensure an accurate representation of the surroundings and enable sensor fusion applications. From a safety perspective, sensor calibration is a key enabler of autonomous driving. In the current state of the art, a trend from target-based offline calibration towards targetless online calibration can be observed. However, online calibration is subject to strict real-time and resource constraints which are not met by state-of-the-art methods. This is mainly due to the high number of parameters to estimate, the reliance on geometric features, or the dependence on specific vehicle maneuvers. To meet these requirements and ensure the vehicle's safety at any time, we propose a miscalibration detection framework that shifts the focus from the direct regression of calibration parameters to a binary classification of the calibration state, i.e., calibrated or miscalibrated. Therefore, we propose a contrastive learning approach that compares embedded features in a latent space to classify the calibration state of two different sensor modalities. Moreover, we provide a comprehensive analysis of the feature embeddings and challenging calibration errors that highlight the performance of our approach. As a result, our method outperforms the current state-of-the-art in terms of detection performance, inference time, and resource demand. The code is open source and available on https://github.com/TUMFTM/MiscalibrationDetection.
SpaRC: Sparse Radar-Camera Fusion for 3D Object Detection
Nov 29, 2024In this work, we present SpaRC, a novel Sparse fusion transformer for 3D perception that integrates multi-view image semantics with Radar and Camera point features. The fusion of radar and camera modalities has emerged as an efficient perception paradigm for autonomous driving systems. While conventional approaches utilize dense Bird's Eye View (BEV)-based architectures for depth estimation, contemporary query-based transformers excel in camera-only detection through object-centric methodology. However, these query-based approaches exhibit limitations in false positive detections and localization precision due to implicit depth modeling. We address these challenges through three key contributions: (1) sparse frustum fusion (SFF) for cross-modal feature alignment, (2) range-adaptive radar aggregation (RAR) for precise object localization, and (3) local self-attention (LSA) for focused query aggregation. In contrast to existing methods requiring computationally intensive BEV-grid rendering, SpaRC operates directly on encoded point features, yielding substantial improvements in efficiency and accuracy. Empirical evaluations on the nuScenes and TruckScenes benchmarks demonstrate that SpaRC significantly outperforms existing dense BEV-based and sparse query-based detectors. Our method achieves state-of-the-art performance metrics of 67.1 NDS and 63.1 AMOTA. The code and pretrained models are available at https://github.com/phi-wol/sparc.
MAN TruckScenes: A multimodal dataset for autonomous trucking in diverse conditions
Jul 10, 2024



Autonomous trucking is a promising technology that can greatly impact modern logistics and the environment. Ensuring its safety on public roads is one of the main duties that requires an accurate perception of the environment. To achieve this, machine learning methods rely on large datasets, but to this day, no such datasets are available for autonomous trucks. In this work, we present MAN TruckScenes, the first multimodal dataset for autonomous trucking. MAN TruckScenes allows the research community to come into contact with truck-specific challenges, such as trailer occlusions, novel sensor perspectives, and terminal environments for the first time. It comprises more than 740 scenes of 20 s each within a multitude of different environmental conditions. The sensor set includes 4 cameras, 6 lidar, 6 radar sensors, 2 IMUs, and a high-precision GNSS. The dataset's 3D bounding boxes were manually annotated and carefully reviewed to achieve a high quality standard. Bounding boxes are available for 27 object classes, 15 attributes, and a range of more than 230 m. The scenes are tagged according to 34 distinct scene tags, and all objects are tracked throughout the scene to promote a wide range of applications. Additionally, MAN TruckScenes is the first dataset to provide 4D radar data with 360{\deg} coverage and is thereby the largest radar dataset with annotated 3D bounding boxes. Finally, we provide extensive dataset analysis and baseline results. The dataset, development kit and more are available online.
GMMCalib: Extrinsic Calibration of LiDAR Sensors using GMM-based Joint Registration
Apr 08, 2024



State-of-the-art LiDAR calibration frameworks mainly use non-probabilistic registration methods such as Iterative Closest Point (ICP) and its variants. These methods suffer from biased results due to their pair-wise registration procedure as well as their sensitivity to initialization and parameterization. This often leads to misalignments in the calibration process. Probabilistic registration methods compensate for these drawbacks by specifically modeling the probabilistic nature of the observations. This paper presents GMMCalib, an automatic target-based extrinsic calibration approach for multi-LiDAR systems. Using an implementation of a Gaussian Mixture Model (GMM)-based registration method that allows joint registration of multiple point clouds, this data-driven approach is compared to ICP algorithms. We perform simulation experiments using the digital twin of the EDGAR research vehicle and validate the results in a real-world environment. We also address the local minima problem of local registration methods for extrinsic sensor calibration and use a distance-based metric to evaluate the calibration results. Our results show that an increase in robustness against sensor miscalibrations can be achieved by using GMM-based registration algorithms. The code is open source and available on GitHub.
DPFT: Dual Perspective Fusion Transformer for Camera-Radar-based Object Detection
Apr 03, 2024The perception of autonomous vehicles has to be efficient, robust, and cost-effective. However, cameras are not robust against severe weather conditions, lidar sensors are expensive, and the performance of radar-based perception is still inferior to the others. Camera-radar fusion methods have been proposed to address this issue, but these are constrained by the typical sparsity of radar point clouds and often designed for radars without elevation information. We propose a novel camera-radar fusion approach called Dual Perspective Fusion Transformer (DPFT), designed to overcome these limitations. Our method leverages lower-level radar data (the radar cube) instead of the processed point clouds to preserve as much information as possible and employs projections in both the camera and ground planes to effectively use radars with elevation information and simplify the fusion with camera data. As a result, DPFT has demonstrated state-of-the-art performance on the K-Radar dataset while showing remarkable robustness against adverse weather conditions and maintaining a low inference time. The code is made available as open-source software under https://github.com/TUMFTM/DPFT.
Multi-Modal Sensor Fusion and Object Tracking for Autonomous Racing
Oct 12, 2023



Reliable detection and tracking of surrounding objects are indispensable for comprehensive motion prediction and planning of autonomous vehicles. Due to the limitations of individual sensors, the fusion of multiple sensor modalities is required to improve the overall detection capabilities. Additionally, robust motion tracking is essential for reducing the effect of sensor noise and improving state estimation accuracy. The reliability of the autonomous vehicle software becomes even more relevant in complex, adversarial high-speed scenarios at the vehicle handling limits in autonomous racing. In this paper, we present a modular multi-modal sensor fusion and tracking method for high-speed applications. The method is based on the Extended Kalman Filter (EKF) and is capable of fusing heterogeneous detection inputs to track surrounding objects consistently. A novel delay compensation approach enables to reduce the influence of the perception software latency and to output an updated object list. It is the first fusion and tracking method validated in high-speed real-world scenarios at the Indy Autonomous Challenge 2021 and the Autonomous Challenge at CES (AC@CES) 2022, proving its robustness and computational efficiency on embedded systems. It does not require any labeled data and achieves position tracking residuals below 0.1 m. The related code is available as open-source software at https://github.com/TUMFTM/FusionTracking.
EDGAR: An Autonomous Driving Research Platform -- From Feature Development to Real-World Application
Sep 27, 2023
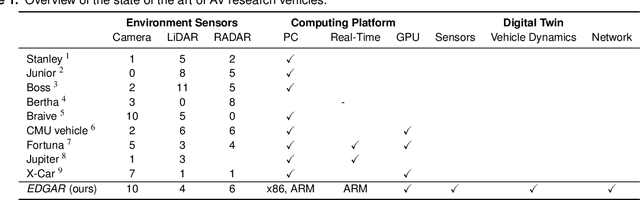

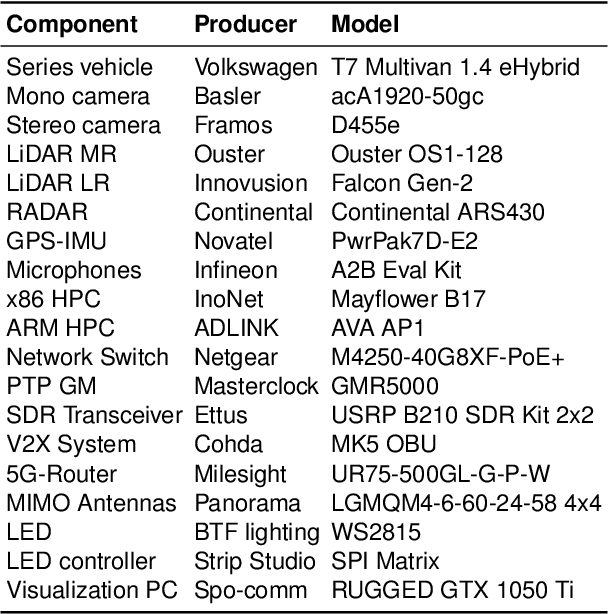
While current research and development of autonomous driving primarily focuses on developing new features and algorithms, the transfer from isolated software components into an entire software stack has been covered sparsely. Besides that, due to the complexity of autonomous software stacks and public road traffic, the optimal validation of entire stacks is an open research problem. Our paper targets these two aspects. We present our autonomous research vehicle EDGAR and its digital twin, a detailed virtual duplication of the vehicle. While the vehicle's setup is closely related to the state of the art, its virtual duplication is a valuable contribution as it is crucial for a consistent validation process from simulation to real-world tests. In addition, different development teams can work with the same model, making integration and testing of the software stacks much easier, significantly accelerating the development process. The real and virtual vehicles are embedded in a comprehensive development environment, which is also introduced. All parameters of the digital twin are provided open-source at https://github.com/TUMFTM/edgar_digital_twin.
Evaluating Pedestrian Trajectory Prediction Methods for the Application in Autonomous Driving
Aug 09, 2023



In this paper, the state of the art in the field of pedestrian trajectory prediction is evaluated alongside the constant velocity model (CVM) with respect to its applicability in autonomous vehicles. The evaluation is conducted on the widely-used ETH/UCY dataset where the Average Displacement Error (ADE) and the Final Displacement Error (FDE) are reported. To align with requirements in real-world applications, modifications are made to the input features of the initially proposed models. An ablation study is conducted to examine the influence of the observed motion history on the prediction performance, thereby establishing a better understanding of its impact. Additionally, the inference time of each model is measured to evaluate the scalability of each model when confronted with varying amounts of agents. The results demonstrate that simple models remain competitive when generating single trajectories, and certain features commonly thought of as useful have little impact on the overall performance across different architectures. Based on these findings, recommendations are proposed to guide the future development of trajectory prediction algorithms.
RadarGNN: Transformation Invariant Graph Neural Network for Radar-based Perception
Apr 13, 2023



A reliable perception has to be robust against challenging environmental conditions. Therefore, recent efforts focused on the use of radar sensors in addition to camera and lidar sensors for perception applications. However, the sparsity of radar point clouds and the poor data availability remain challenging for current perception methods. To address these challenges, a novel graph neural network is proposed that does not just use the information of the points themselves but also the relationships between the points. The model is designed to consider both point features and point-pair features, embedded in the edges of the graph. Furthermore, a general approach for achieving transformation invariance is proposed which is robust against unseen scenarios and also counteracts the limited data availability. The transformation invariance is achieved by an invariant data representation rather than an invariant model architecture, making it applicable to other methods. The proposed RadarGNN model outperforms all previous methods on the RadarScenes dataset. In addition, the effects of different invariances on the object detection and semantic segmentation quality are investigated. The code is made available as open-source software under https://github.com/TUMFTM/RadarGNN.