 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRadarGNN: Transformation Invariant Graph Neural Network for Radar-based Perception
Paper and Code
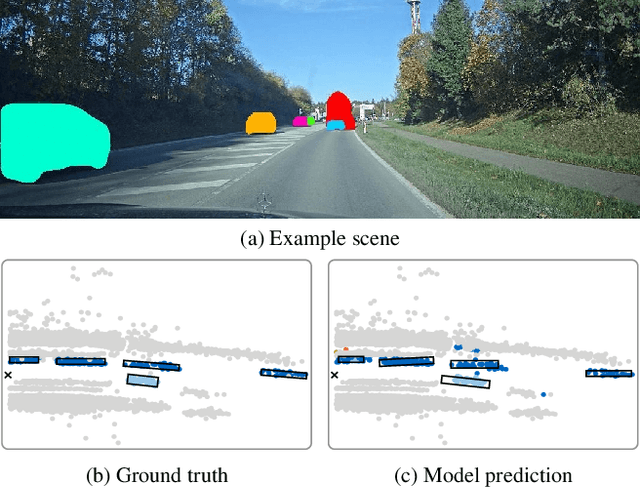



A reliable perception has to be robust against challenging environmental conditions. Therefore, recent efforts focused on the use of radar sensors in addition to camera and lidar sensors for perception applications. However, the sparsity of radar point clouds and the poor data availability remain challenging for current perception methods. To address these challenges, a novel graph neural network is proposed that does not just use the information of the points themselves but also the relationships between the points. The model is designed to consider both point features and point-pair features, embedded in the edges of the graph. Furthermore, a general approach for achieving transformation invariance is proposed which is robust against unseen scenarios and also counteracts the limited data availability. The transformation invariance is achieved by an invariant data representation rather than an invariant model architecture, making it applicable to other methods. The proposed RadarGNN model outperforms all previous methods on the RadarScenes dataset. In addition, the effects of different invariances on the object detection and semantic segmentation quality are investigated. The code is made available as open-source software under https://github.com/TUMFTM/RadarGNN.