 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Modal Sensor Fusion and Object Tracking for Autonomous Racing
Oct 12, 2023



Reliable detection and tracking of surrounding objects are indispensable for comprehensive motion prediction and planning of autonomous vehicles. Due to the limitations of individual sensors, the fusion of multiple sensor modalities is required to improve the overall detection capabilities. Additionally, robust motion tracking is essential for reducing the effect of sensor noise and improving state estimation accuracy. The reliability of the autonomous vehicle software becomes even more relevant in complex, adversarial high-speed scenarios at the vehicle handling limits in autonomous racing. In this paper, we present a modular multi-modal sensor fusion and tracking method for high-speed applications. The method is based on the Extended Kalman Filter (EKF) and is capable of fusing heterogeneous detection inputs to track surrounding objects consistently. A novel delay compensation approach enables to reduce the influence of the perception software latency and to output an updated object list. It is the first fusion and tracking method validated in high-speed real-world scenarios at the Indy Autonomous Challenge 2021 and the Autonomous Challenge at CES (AC@CES) 2022, proving its robustness and computational efficiency on embedded systems. It does not require any labeled data and achieves position tracking residuals below 0.1 m. The related code is available as open-source software at https://github.com/TUMFTM/FusionTracking.
EDGAR: An Autonomous Driving Research Platform -- From Feature Development to Real-World Application
Sep 27, 2023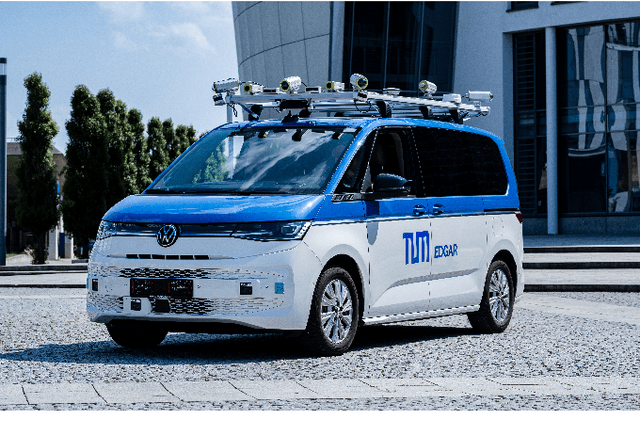
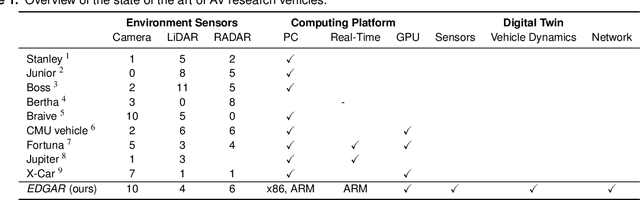

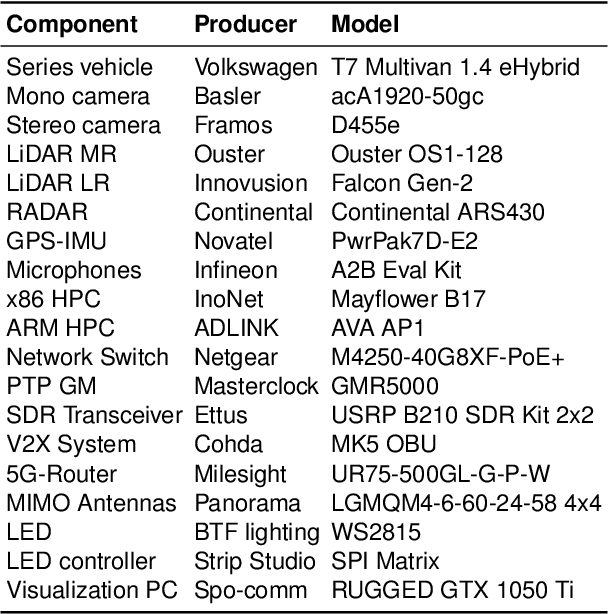
While current research and development of autonomous driving primarily focuses on developing new features and algorithms, the transfer from isolated software components into an entire software stack has been covered sparsely. Besides that, due to the complexity of autonomous software stacks and public road traffic, the optimal validation of entire stacks is an open research problem. Our paper targets these two aspects. We present our autonomous research vehicle EDGAR and its digital twin, a detailed virtual duplication of the vehicle. While the vehicle's setup is closely related to the state of the art, its virtual duplication is a valuable contribution as it is crucial for a consistent validation process from simulation to real-world tests. In addition, different development teams can work with the same model, making integration and testing of the software stacks much easier, significantly accelerating the development process. The real and virtual vehicles are embedded in a comprehensive development environment, which is also introduced. All parameters of the digital twin are provided open-source at https://github.com/TUMFTM/edgar_digital_twin.
MixNet: Structured Deep Neural Motion Prediction for Autonomous Racing
Aug 03, 2022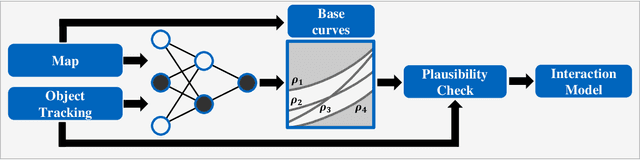


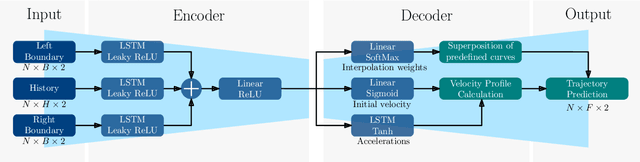
Reliably predicting the motion of contestant vehicles surrounding an autonomous racecar is crucial for effective and performant planning. Although highly expressive, deep neural networks are black-box models, making their usage challenging in safety-critical applications, such as autonomous driving. In this paper, we introduce a structured way of forecasting the movement of opposing racecars with deep neural networks. The resulting set of possible output trajectories is constrained. Hence quality guarantees about the prediction can be given. We report the performance of the model by evaluating it together with an LSTM-based encoder-decoder architecture on data acquired from high-fidelity Hardware-in-the-Loop simulations. The proposed approach outperforms the baseline regarding the prediction accuracy but still fulfills the quality guarantees. Thus, a robust real-world application of the model is proven. The presented model was deployed on the racecar of the Technical University of Munich for the Indy Autonomous Challenge 2021. The code used in this research is available as open-source software at www.github.com/TUMFTM/MixNet.
TUM Autonomous Motorsport: An Autonomous Racing Software for the Indy Autonomous Challenge
May 31, 2022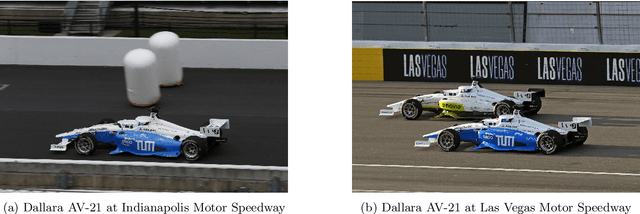
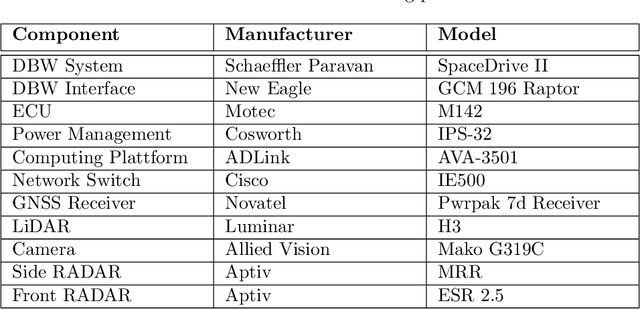
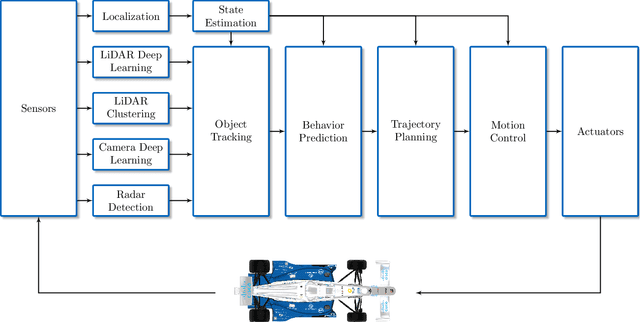
For decades, motorsport has been an incubator for innovations in the automotive sector and brought forth systems like disk brakes or rearview mirrors. Autonomous racing series such as Roborace, F1Tenth, or the Indy Autonomous Challenge (IAC) are envisioned as playing a similar role within the autonomous vehicle sector, serving as a proving ground for new technology at the limits of the autonomous systems capabilities. This paper outlines the software stack and approach of the TUM Autonomous Motorsport team for their participation in the Indy Autonomous Challenge, which holds two competitions: A single-vehicle competition on the Indianapolis Motor Speedway and a passing competition at the Las Vegas Motor Speedway. Nine university teams used an identical vehicle platform: A modified Indy Lights chassis equipped with sensors, a computing platform, and actuators. All the teams developed different algorithms for object detection, localization, planning, prediction, and control of the race cars. The team from TUM placed first in Indianapolis and secured second place in Las Vegas. During the final of the passing competition, the TUM team reached speeds and accelerations close to the limit of the vehicle, peaking at around 270 km/h and 28 ms2. This paper will present details of the vehicle hardware platform, the developed algorithms, and the workflow to test and enhance the software applied during the two-year project. We derive deep insights into the autonomous vehicle's behavior at high speed and high acceleration by providing a detailed competition analysis. Based on this, we deduce a list of lessons learned and provide insights on promising areas of future work based on the real-world evaluation of the displayed concepts.
Autonomous Vehicles on the Edge: A Survey on Autonomous Vehicle Racing
Feb 14, 2022
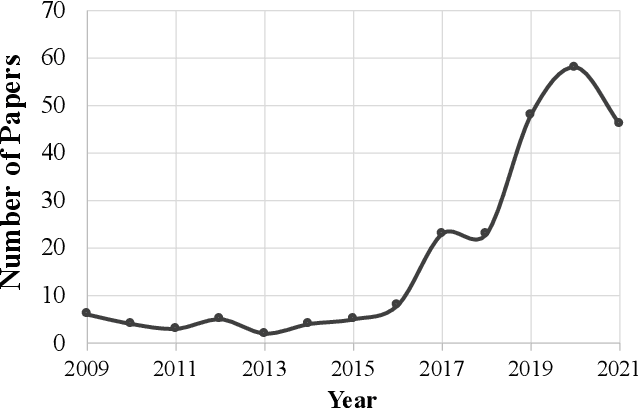
The rising popularity of self-driving cars has led to the emergence of a new research field in the recent years: Autonomous racing. Researchers are developing software and hardware for high performance race vehicles which aim to operate autonomously on the edge of the vehicles limits: High speeds, high accelerations, low reaction times, highly uncertain, dynamic and adversarial environments. This paper represents the first holistic survey that covers the research in the field of autonomous racing. We focus on the field of autonomous racecars only and display the algorithms, methods and approaches that are used in the fields of perception, planning and control as well as end-to-end learning. Further, with an increasing number of autonomous racing competitions, researchers now have access to a range of high performance platforms to test and evaluate their autonomy algorithms. This survey presents a comprehensive overview of the current autonomous racing platforms emphasizing both the software-hardware co-evolution to the current stage. Finally, based on additional discussion with leading researchers in the field we conclude with a summary of open research challenges that will guide future researchers in this field.
Indy Autonomous Challenge -- Autonomous Race Cars at the Handling Limits
Feb 08, 2022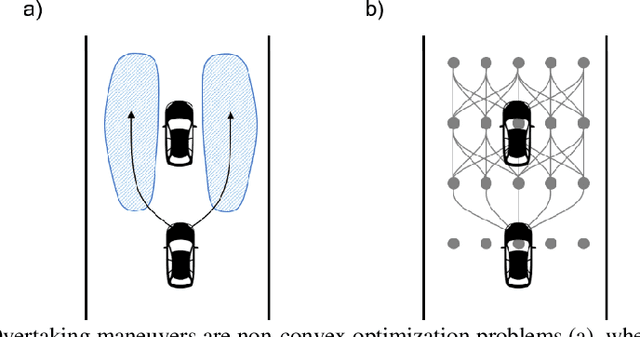
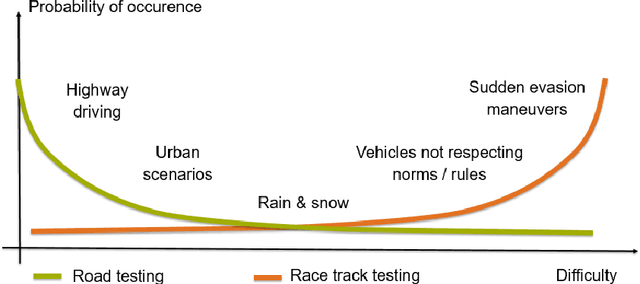

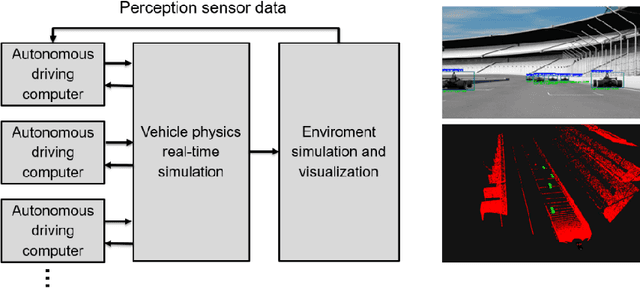
Motorsport has always been an enabler for technological advancement, and the same applies to the autonomous driving industry. The team TUM Auton-omous Motorsports will participate in the Indy Autonomous Challenge in Octo-ber 2021 to benchmark its self-driving software-stack by racing one out of ten autonomous Dallara AV-21 racecars at the Indianapolis Motor Speedway. The first part of this paper explains the reasons for entering an autonomous vehicle race from an academic perspective: It allows focusing on several edge cases en-countered by autonomous vehicles, such as challenging evasion maneuvers and unstructured scenarios. At the same time, it is inherently safe due to the motor-sport related track safety precautions. It is therefore an ideal testing ground for the development of autonomous driving algorithms capable of mastering the most challenging and rare situations. In addition, we provide insight into our soft-ware development workflow and present our Hardware-in-the-Loop simulation setup. It is capable of running simulations of up to eight autonomous vehicles in real time. The second part of the paper gives a high-level overview of the soft-ware architecture and covers our development priorities in building a high-per-formance autonomous racing software: maximum sensor detection range, relia-ble handling of multi-vehicle situations, as well as reliable motion control under uncertainty.
Radar Voxel Fusion for 3D Object Detection
Jun 26, 2021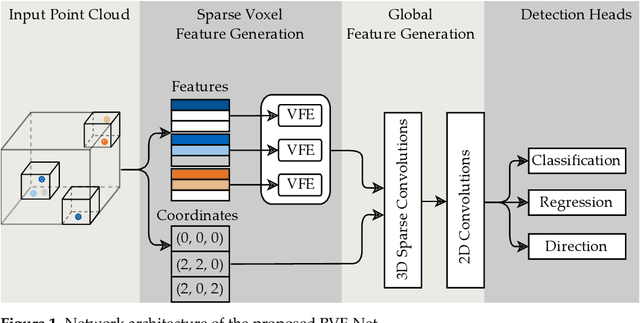

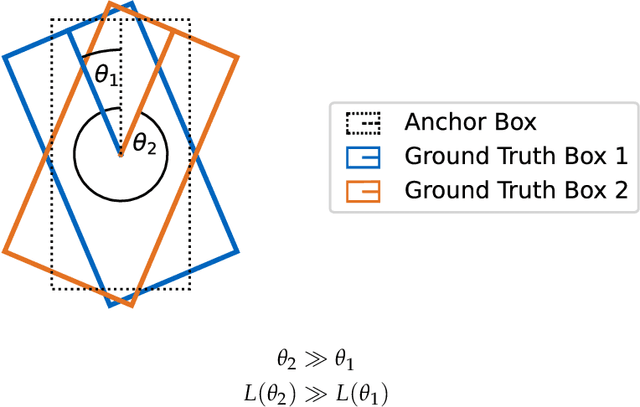
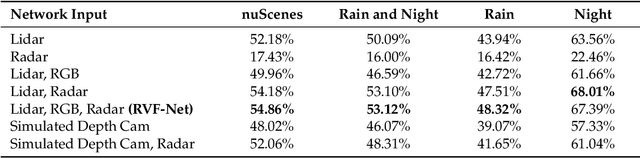
Automotive traffic scenes are complex due to the variety of possible scenarios, objects, and weather conditions that need to be handled. In contrast to more constrained environments, such as automated underground trains, automotive perception systems cannot be tailored to a narrow field of specific tasks but must handle an ever-changing environment with unforeseen events. As currently no single sensor is able to reliably perceive all relevant activity in the surroundings, sensor data fusion is applied to perceive as much information as possible. Data fusion of different sensors and sensor modalities on a low abstraction level enables the compensation of sensor weaknesses and misdetections among the sensors before the information-rich sensor data are compressed and thereby information is lost after a sensor-individual object detection. This paper develops a low-level sensor fusion network for 3D object detection, which fuses lidar, camera, and radar data. The fusion network is trained and evaluated on the nuScenes data set. On the test set, fusion of radar data increases the resulting AP (Average Precision) detection score by about 5.1% in comparison to the baseline lidar network. The radar sensor fusion proves especially beneficial in inclement conditions such as rain and night scenes. Fusing additional camera data contributes positively only in conjunction with the radar fusion, which shows that interdependencies of the sensors are important for the detection result. Additionally, the paper proposes a novel loss to handle the discontinuity of a simple yaw representation for object detection. Our updated loss increases the detection and orientation estimation performance for all sensor input configurations. The code for this research has been made available on GitHub.