 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHALO: Fault-Tolerant Safety Architecture For High-Speed Autonomous Racing
Mar 13, 2025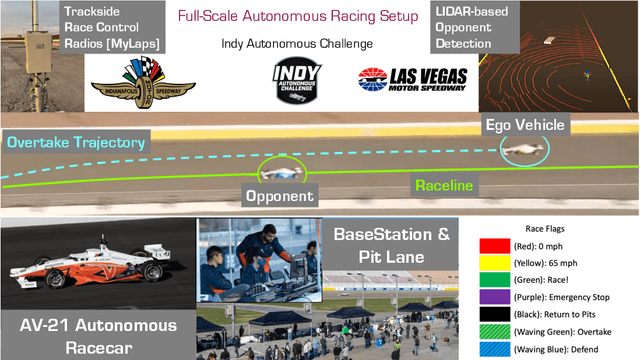

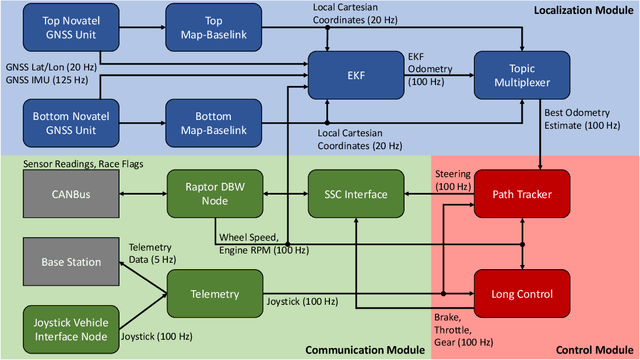
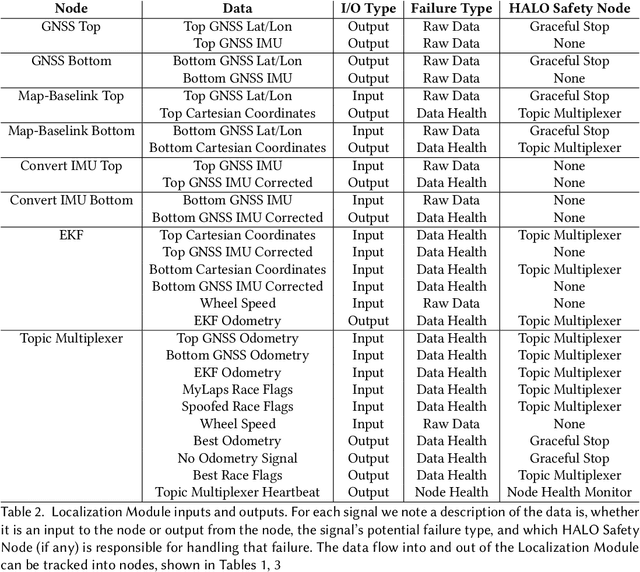
The field of high-speed autonomous racing has seen significant advances in recent years, with the rise of competitions such as RoboRace and the Indy Autonomous Challenge providing a platform for researchers to develop software stacks for autonomous race vehicles capable of reaching speeds in excess of 170 mph. Ensuring the safety of these vehicles requires the software to continuously monitor for different faults and erroneous operating conditions during high-speed operation, with the goal of mitigating any unreasonable risks posed by malfunctions in sub-systems and components. This paper presents a comprehensive overview of the HALO safety architecture, which has been implemented on a full-scale autonomous racing vehicle as part of the Indy Autonomous Challenge. The paper begins with a failure mode and criticality analysis of the perception, planning, control, and communication modules of the software stack. Specifically, we examine three different types of faults - node health, data health, and behavioral-safety faults. To mitigate these faults, the paper then outlines HALO safety archetypes and runtime monitoring methods. Finally, the paper demonstrates the effectiveness of the HALO safety architecture for each of the faults, through real-world data gathered from autonomous racing vehicle trials during multi-agent scenarios.
Trajectory-to-Action Pipeline (TAP): Automated Scenario Description Extraction for Autonomous Vehicle Behavior Comparison
Feb 27, 2025



Scenario Description Languages (SDLs) provide structured, interpretable embeddings that represent traffic scenarios encountered by autonomous vehicles (AVs), supporting key tasks such as scenario similarity searches and edge case detection for safety analysis. This paper introduces the Trajectory-to-Action Pipeline (TAP), a scalable and automated method for extracting SDL labels from large trajectory datasets. TAP applies a rules-based cross-entropy optimization approach to learn parameters directly from data, enhancing generalization across diverse driving contexts. Using the Waymo Open Motion Dataset (WOMD), TAP achieves 30% greater precision than Average Displacement Error (ADE) and 24% over Dynamic Time Warping (DTW) in identifying behaviorally similar trajectories. Additionally, TAP enables automated detection of unique driving behaviors, streamlining safety evaluation processes for AV testing. This work provides a foundation for scalable scenario-based AV behavior analysis, with potential extensions for integrating multi-agent contexts.
CRASH: Challenging Reinforcement-Learning Based Adversarial Scenarios For Safety Hardening
Nov 26, 2024



Ensuring the safety of autonomous vehicles (AVs) requires identifying rare but critical failure cases that on-road testing alone cannot discover. High-fidelity simulations provide a scalable alternative, but automatically generating realistic and diverse traffic scenarios that can effectively stress test AV motion planners remains a key challenge. This paper introduces CRASH - Challenging Reinforcement-learning based Adversarial scenarios for Safety Hardening - an adversarial deep reinforcement learning framework to address this issue. First CRASH can control adversarial Non Player Character (NPC) agents in an AV simulator to automatically induce collisions with the Ego vehicle, falsifying its motion planner. We also propose a novel approach, that we term safety hardening, which iteratively refines the motion planner by simulating improvement scenarios against adversarial agents, leveraging the failure cases to strengthen the AV stack. CRASH is evaluated on a simplified two-lane highway scenario, demonstrating its ability to falsify both rule-based and learning-based planners with collision rates exceeding 90%. Additionally, safety hardening reduces the Ego vehicle's collision rate by 26%. While preliminary, these results highlight RL-based safety hardening as a promising approach for scenario-driven simulation testing for autonomous vehicles.
DKMGP: A Gaussian Process Approach to Multi-Task and Multi-Step Vehicle Dynamics Modeling in Autonomous Racing
Nov 20, 2024



Autonomous racing is gaining attention for its potential to advance autonomous vehicle technologies. Accurate race car dynamics modeling is essential for capturing and predicting future states like position, orientation, and velocity. However, accurately modeling complex subsystems such as tires and suspension poses significant challenges. In this paper, we introduce the Deep Kernel-based Multi-task Gaussian Process (DKMGP), which leverages the structure of a variational multi-task and multi-step Gaussian process model enhanced with deep kernel learning for vehicle dynamics modeling. Unlike existing single-step methods, DKMGP performs multi-step corrections with an adaptive correction horizon (ACH) algorithm that dynamically adjusts to varying driving conditions. To validate and evaluate the proposed DKMGP method, we compare the model performance with DKL-SKIP and a well-tuned single-track model, using high-speed dynamics data (exceeding 230kmph) collected from a full-scale Indy race car during the Indy Autonomous Challenge held at the Las Vegas Motor Speedway at CES 2024. The results demonstrate that DKMGP achieves upto 99% prediction accuracy compared to one-step DKL-SKIP, while improving real-time computational efficiency by 1752x. Our results show that DKMGP is a scalable and efficient solution for vehicle dynamics modeling making it suitable for high-speed autonomous racing control.
ARGOS: An Automaton Referencing Guided Overtake System for Head-to-Head Autonomous Racing
Jan 28, 2024Autonomous overtaking at high speeds is a challenging multi-agent robotics research problem. The high-speed and close proximity situations that arise in multi-agent autonomous racing require designing algorithms that trade off aggressive overtaking maneuvers and minimize the risk of collision with the opponent. In this paper, we study a special case of multi-agent autonomous race, called the head-to-head autonomous race, that requires two racecars with similar performance envelopes. We present a mathematical formulation of an overtake and position defense in this head-to-head autonomous racing scenario, and we introduce the Automaton Referencing Guided Overtake System (ARGOS) framework that supervises the execution of an overtake or position defense maneuver depending on the current role of the racecar. The ARGOS framework works by decomposing complex overtake and position-defense maneuvers into sequential and temporal submaneuvers that are individually managed and supervised by a network of automatons. We verify the properties of the ARGOS framework using model-checking and demonstrate results from multiple simulations, which show that the framework meets the desired specifications. The ARGOS framework performs similar to what can be observed from real-world human-driven motor sport racing.
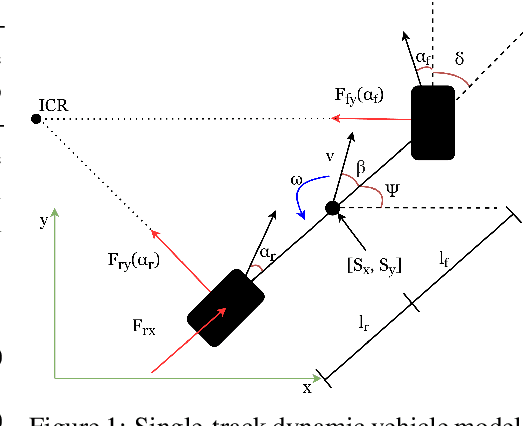
Deep Dynamics: Vehicle Dynamics Modeling with a Physics-Informed Neural Network for Autonomous Racing
Dec 07, 2023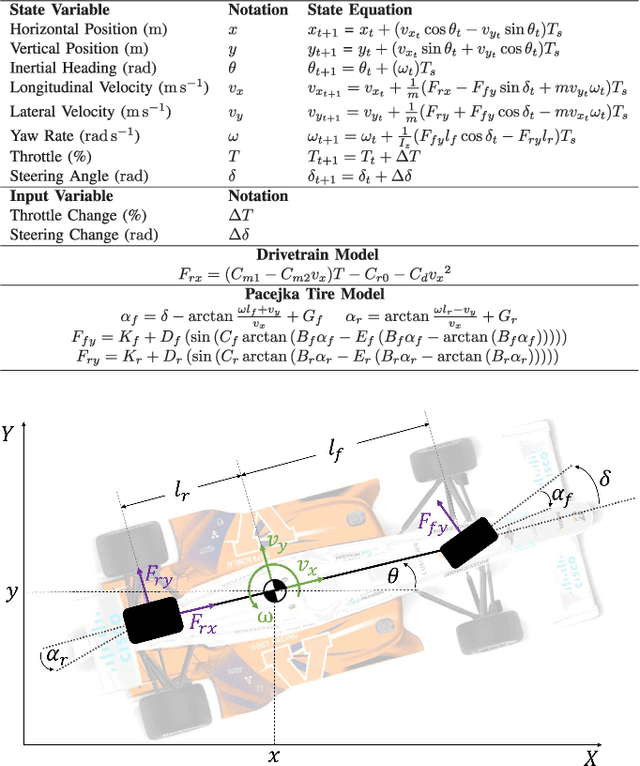
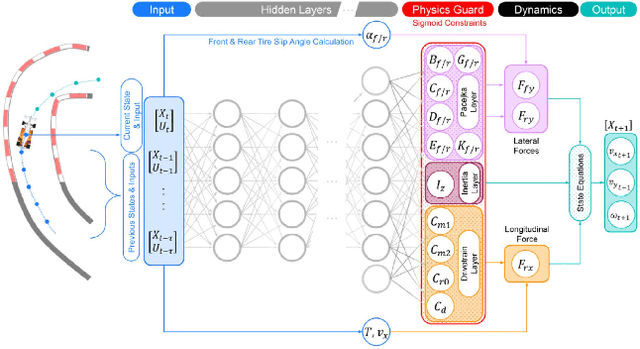
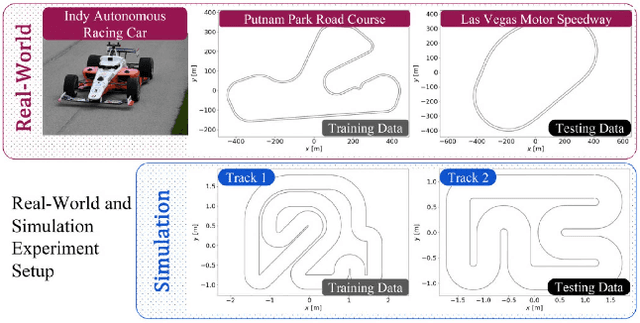
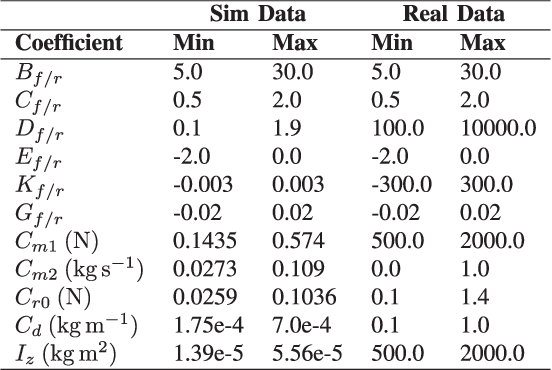
Autonomous racing is a critical research area for autonomous driving, presenting significant challenges in vehicle dynamics modeling, such as balancing model precision and computational efficiency at high speeds (>280kmph), where minor errors in modeling have severe consequences. Existing physics-based models for vehicle dynamics require elaborate testing setups and tuning, which are hard to implement, time-intensive, and cost-prohibitive. Conversely, purely data-driven approaches do not generalize well and cannot adequately ensure physical constraints on predictions. This paper introduces Deep Dynamics, a physics-informed neural network (PINN) for vehicle dynamics modeling of an autonomous racecar. It combines physics coefficient estimation and dynamical equations to accurately predict vehicle states at high speeds and includes a unique Physics Guard layer to ensure internal coefficient estimates remain within their nominal physical ranges. Open-loop and closed-loop performance assessments, using a physics-based simulator and full-scale autonomous Indy racecar data, highlight Deep Dynamics as a promising approach for modeling racecar vehicle dynamics.
Vehicle Dynamics Modeling for Autonomous Racing Using Gaussian Processes
Jun 06, 2023

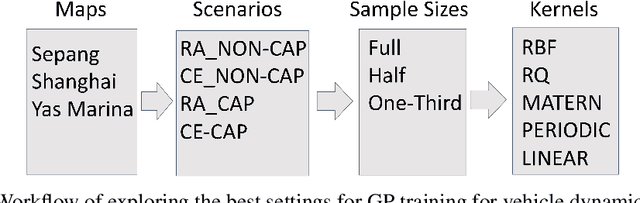
Autonomous racing is increasingly becoming a proving ground for autonomous vehicle technology at the limits of its current capabilities. The most prominent examples include the F1Tenth racing series, Formula Student Driverless (FSD), Roborace, and the Indy Autonomous Challenge (IAC). Especially necessary, in high speed autonomous racing, is the knowledge of accurate racecar vehicle dynamics. The choice of the vehicle dynamics model has to be made by balancing the increasing computational demands in contrast to improved accuracy of more complex models. Recent studies have explored learning-based methods, such as Gaussian Process (GP) regression for approximating the vehicle dynamics model. However, these efforts focus on higher level constructs such as motion planning, or predictive control and lack both in realism and rigor of the GP modeling process, which is often over-simplified. This paper presents the most detailed analysis of the applicability of GP models for approximating vehicle dynamics for autonomous racing. In particular we construct dynamic, and extended kinematic models for the popular F1TENTH racing platform. We investigate the effect of kernel choices, sample sizes, racetrack layout, racing lines, and velocity profiles on the efficacy and generalizability of the learned dynamics. We conduct 400+ simulations on real F1 track layouts to provide comprehensive recommendations to the research community for training accurate GP regression for single-track vehicle dynamics of a racecar.
RACECAR -- The Dataset for High-Speed Autonomous Racing
Jun 05, 2023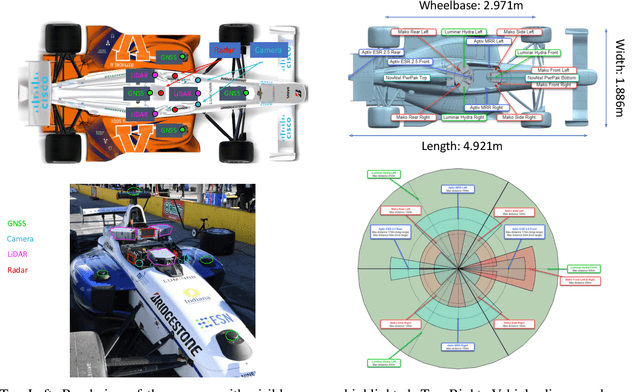
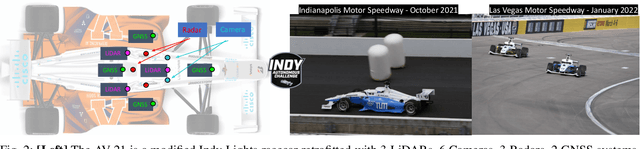
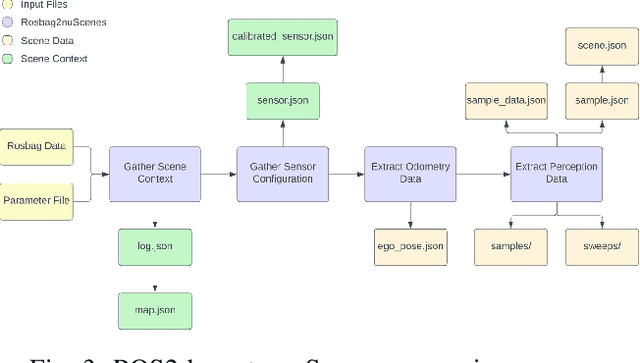
This paper describes the first open dataset for full-scale and high-speed autonomous racing. Multi-modal sensor data has been collected from fully autonomous Indy race cars operating at speeds of up to 170 mph (273 kph). Six teams who raced in the Indy Autonomous Challenge have contributed to this dataset. The dataset spans 11 interesting racing scenarios across two race tracks which include solo laps, multi-agent laps, overtaking situations, high-accelerations, banked tracks, obstacle avoidance, pit entry and exit at different speeds. The dataset contains data from 27 racing sessions across the 11 scenarios with over 6.5 hours of sensor data recorded from the track. The data is organized and released in both ROS2 and nuScenes format. We have also developed the ROS2-to-nuScenes conversion library to achieve this. The RACECAR data is unique because of the high-speed environment of autonomous racing. We present several benchmark problems on localization, object detection and tracking (LiDAR, Radar, and Camera), and mapping using the RACECAR data to explore issues that arise at the limits of operation of the vehicle.
Teaching Autonomous Systems Hands-On: Leveraging Modular Small-Scale Hardware in the Robotics Classroom
Sep 21, 2022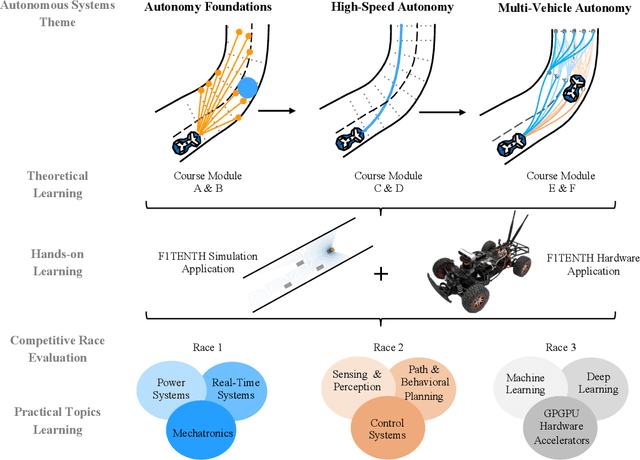
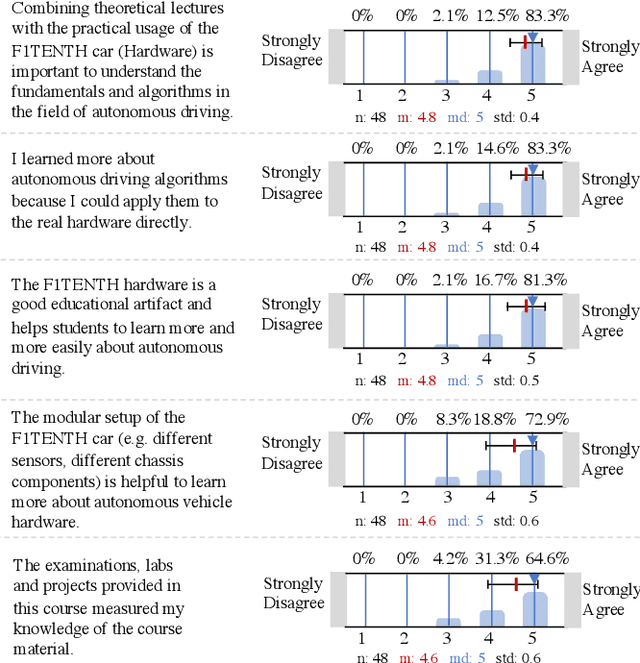
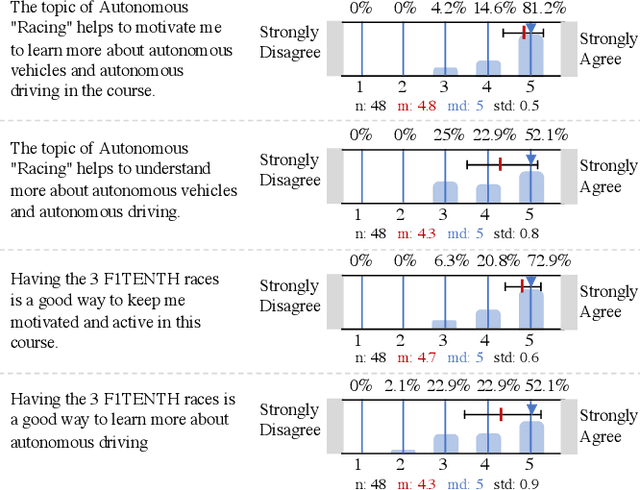
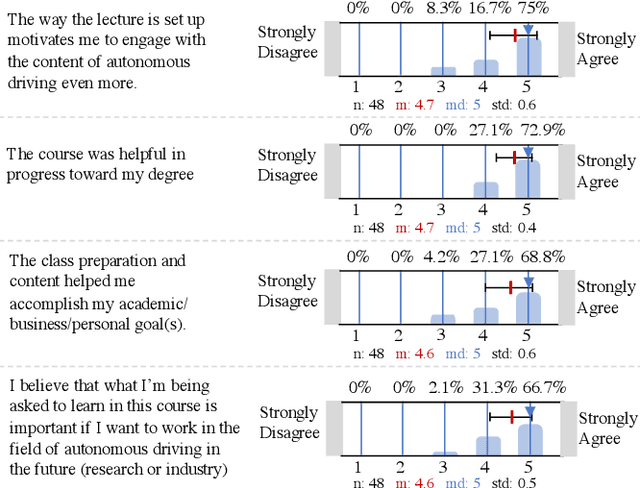
Although robotics courses are well established in higher education, the courses often focus on theory and sometimes lack the systematic coverage of the techniques involved in developing, deploying, and applying software to real hardware. Additionally, most hardware platforms for robotics teaching are low-level toys aimed at younger students at middle-school levels. To address this gap, an autonomous vehicle hardware platform, called F1TENTH, is developed for teaching autonomous systems hands-on. This article describes the teaching modules and software stack for teaching at various educational levels with the theme of "racing" and competitions that replace exams. The F1TENTH vehicles offer a modular hardware platform and its related software for teaching the fundamentals of autonomous driving algorithms. From basic reactive methods to advanced planning algorithms, the teaching modules enhance students' computational thinking through autonomous driving with the F1TENTH vehicle. The F1TENTH car fills the gap between research platforms and low-end toy cars and offers hands-on experience in learning the topics in autonomous systems. Four universities have adopted the teaching modules for their semester-long undergraduate and graduate courses for multiple years. Student feedback is used to analyze the effectiveness of the F1TENTH platform. More than 80% of the students strongly agree that the hardware platform and modules greatly motivate their learning, and more than 70% of the students strongly agree that the hardware-enhanced their understanding of the subjects. The survey results show that more than 80% of the students strongly agree that the competitions motivate them for the course.
This is the Way: Differential Bayesian Filtering for Agile Trajectory Synthesis
Jul 15, 2022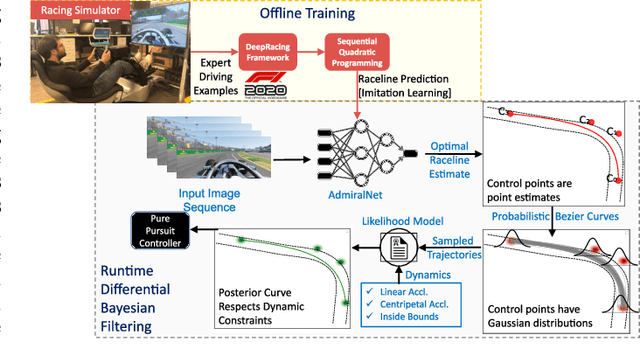
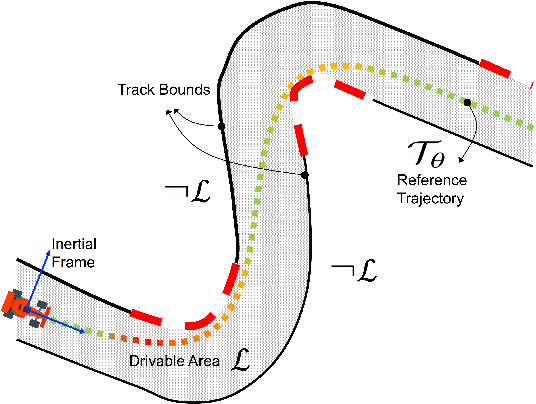

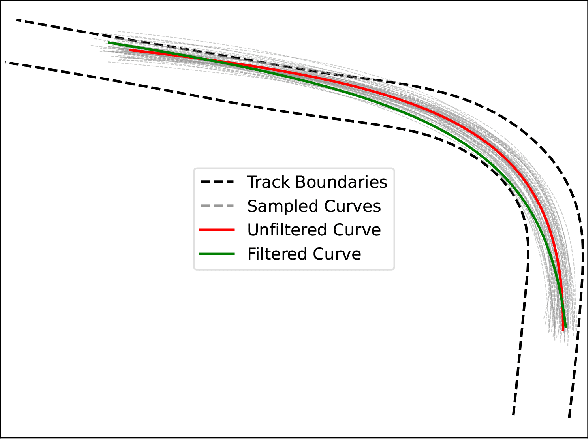
One of the main challenges in autonomous racing is to design algorithms for motion planning at high speed, and across complex racing courses. End-to-end trajectory synthesis has been previously proposed where the trajectory for the ego vehicle is computed based on camera images from the racecar. This is done in a supervised learning setting using behavioral cloning techniques. In this paper, we address the limitations of behavioral cloning methods for trajectory synthesis by introducing Differential Bayesian Filtering (DBF), which uses probabilistic B\'ezier curves as a basis for inferring optimal autonomous racing trajectories based on Bayesian inference. We introduce a trajectory sampling mechanism and combine it with a filtering process which is able to push the car to its physical driving limits. The performance of DBF is evaluated on the DeepRacing Formula One simulation environment and compared with several other trajectory synthesis approaches as well as human driving performance. DBF achieves the fastest lap time, and the fastest speed, by pushing the racecar closer to its limits of control while always remaining inside track bounds.