 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSystem Design of the Ultra Mobility Vehicle: A Driving, Balancing, and Jumping Bicycle Robot
Feb 25, 2026Trials cyclists and mountain bike riders can hop, jump, balance, and drive on one or both wheels. This versatility allows them to achieve speed and energy-efficiency on smooth terrain and agility over rough terrain. Inspired by these athletes, we present the design and control of a robotic platform, Ultra Mobility Vehicle (UMV), which combines a bicycle and a reaction mass to move dynamically with minimal actuated degrees of freedom. We employ a simulation-driven design optimization process to synthesize a spatial linkage topology with a focus on vertical jump height and momentum-based balancing on a single wheel contact. Using a constrained Reinforcement Learning (RL) framework, we demonstrate zero-shot transfer of diverse athletic behaviors, including track-stands, jumps, wheelies, rear wheel hopping, and front flips. This 23.5 kg robot is capable of high speeds (8 m/s) and jumping on and over large obstacles (1 m tall, or 130% of the robot's nominal height).
MPOGames: Efficient Multimodal Partially Observable Dynamic Games
Oct 19, 2022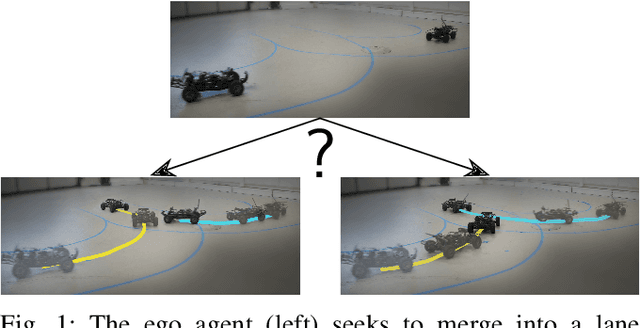
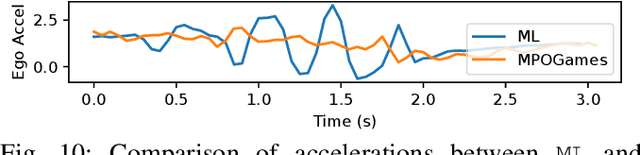

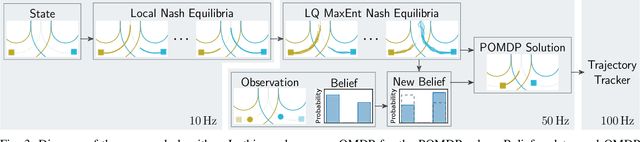
Game theoretic methods have become popular for planning and prediction in situations involving rich multi-agent interactions. However, these methods often assume the existence of a single local Nash equilibria and are hence unable to handle uncertainty in the intentions of different agents. While maximum entropy (MaxEnt) dynamic games try to address this issue, practical approaches solve for MaxEnt Nash equilibria using linear-quadratic approximations which are restricted to unimodal responses and unsuitable for scenarios with multiple local Nash equilibria. By reformulating the problem as a POMDP, we propose MPOGames, a method for efficiently solving MaxEnt dynamic games that captures the interactions between local Nash equilibria. We show the importance of uncertainty-aware game theoretic methods via a two-agent merge case study. Finally, we prove the real-time capabilities of our approach with hardware experiments on a 1/10th scale car platform.
Teaching Autonomous Systems Hands-On: Leveraging Modular Small-Scale Hardware in the Robotics Classroom
Sep 21, 2022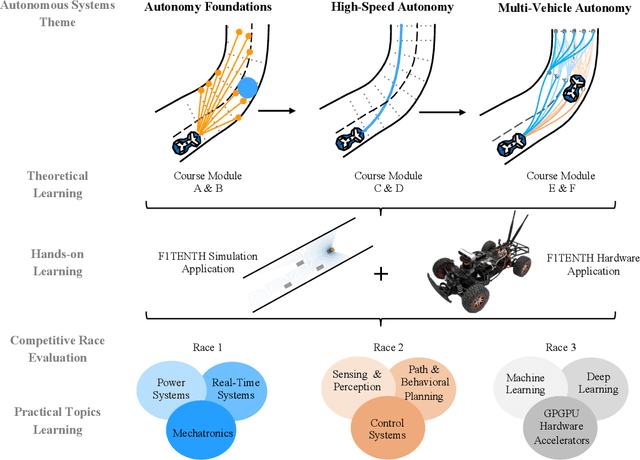
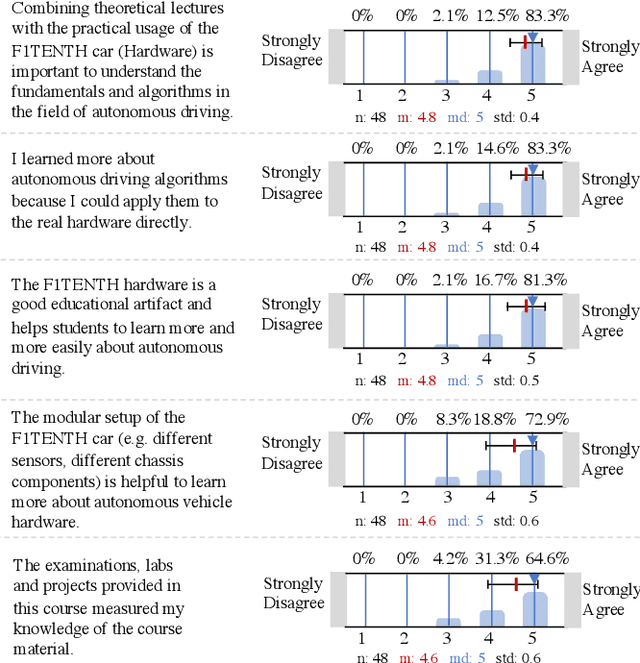
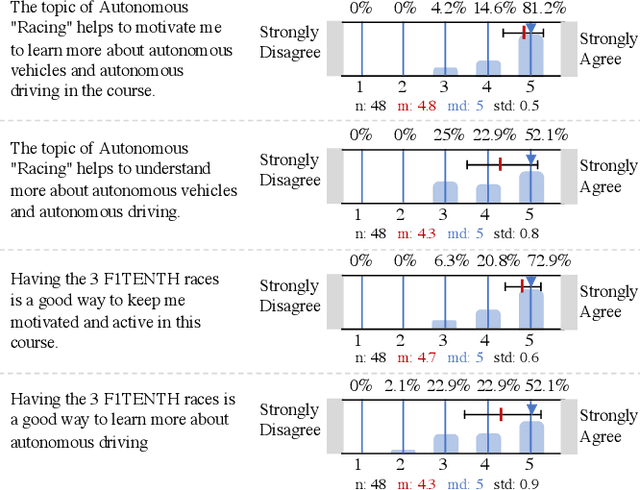
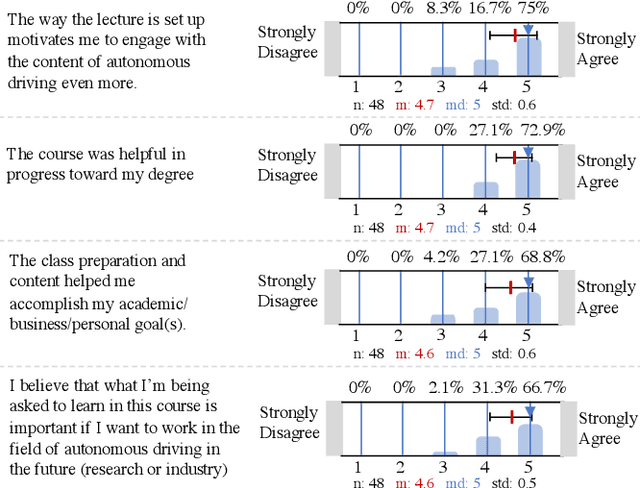
Although robotics courses are well established in higher education, the courses often focus on theory and sometimes lack the systematic coverage of the techniques involved in developing, deploying, and applying software to real hardware. Additionally, most hardware platforms for robotics teaching are low-level toys aimed at younger students at middle-school levels. To address this gap, an autonomous vehicle hardware platform, called F1TENTH, is developed for teaching autonomous systems hands-on. This article describes the teaching modules and software stack for teaching at various educational levels with the theme of "racing" and competitions that replace exams. The F1TENTH vehicles offer a modular hardware platform and its related software for teaching the fundamentals of autonomous driving algorithms. From basic reactive methods to advanced planning algorithms, the teaching modules enhance students' computational thinking through autonomous driving with the F1TENTH vehicle. The F1TENTH car fills the gap between research platforms and low-end toy cars and offers hands-on experience in learning the topics in autonomous systems. Four universities have adopted the teaching modules for their semester-long undergraduate and graduate courses for multiple years. Student feedback is used to analyze the effectiveness of the F1TENTH platform. More than 80% of the students strongly agree that the hardware platform and modules greatly motivate their learning, and more than 70% of the students strongly agree that the hardware-enhanced their understanding of the subjects. The survey results show that more than 80% of the students strongly agree that the competitions motivate them for the course.
A Blended Human-Robot Shared Control Framework to Handle Drift and Latency
Nov 23, 2018



Maximizing the utility of human-robot teams in disaster response and search and rescue (SAR) missions remains to be a challenging problem. This is due to the dynamic, uncertain nature of the environment and the variability in cognitive performance of the human operators. By having an autonomous agent share control with the operator, we can achieve near-optimal performance by augmenting the operator's input and compensate for the factors resulting in degraded performance. What this solution does not consider though is the human input latency and errors caused by potential hardware failures that can occur during task completion when operating in disaster response and SAR scenarios. In this paper, we propose the use of blended shared control (BSC) architecture to address these issues and investigate the architecture's performance in constrained, dynamic environments with a differential drive robot that has input latency and erroneous odometry feedback. We conduct a validation study (n=12) for our control architecture and then a user study (n=14) in 2 different environments that are unknown to both the human operator and the autonomous agent. The results demonstrate that the BSC architecture can prevent collisions and enhance operator performance without the need of a complete transfer of control between the human operator and autonomous agent.