 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePoseINN: Realtime Visual-based Pose Regression and Localization with Invertible Neural Networks
Apr 20, 2024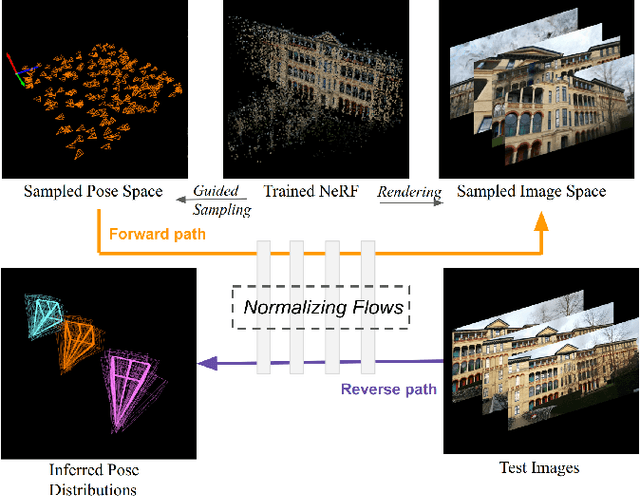
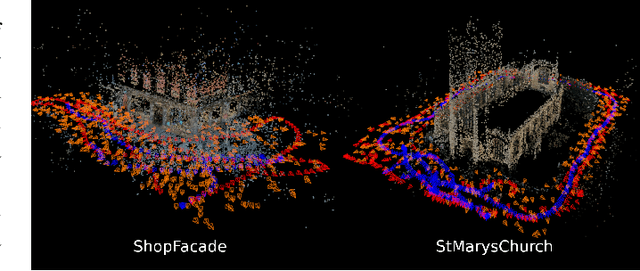
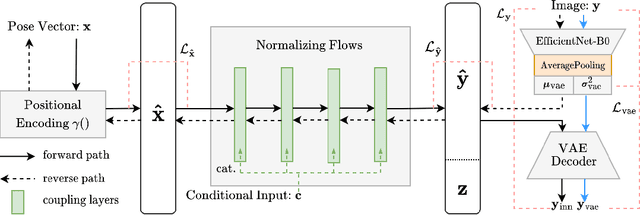
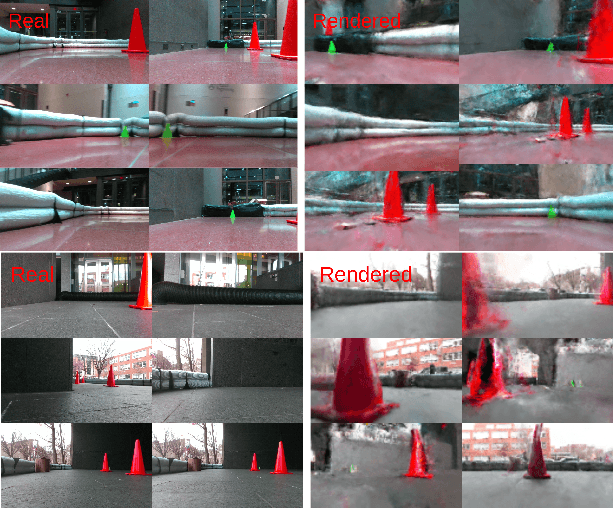
Estimating ego-pose from cameras is an important problem in robotics with applications ranging from mobile robotics to augmented reality. While SOTA models are becoming increasingly accurate, they can still be unwieldy due to high computational costs. In this paper, we propose to solve the problem by using invertible neural networks (INN) to find the mapping between the latent space of images and poses for a given scene. Our model achieves similar performance to the SOTA while being faster to train and only requiring offline rendering of low-resolution synthetic data. By using normalizing flows, the proposed method also provides uncertainty estimation for the output. We also demonstrated the efficiency of this method by deploying the model on a mobile robot.
Ensemble Gaussian Processes for Adaptive Autonomous Driving on Multi-friction Surfaces
Mar 23, 2023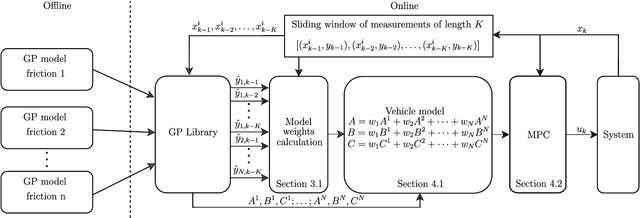
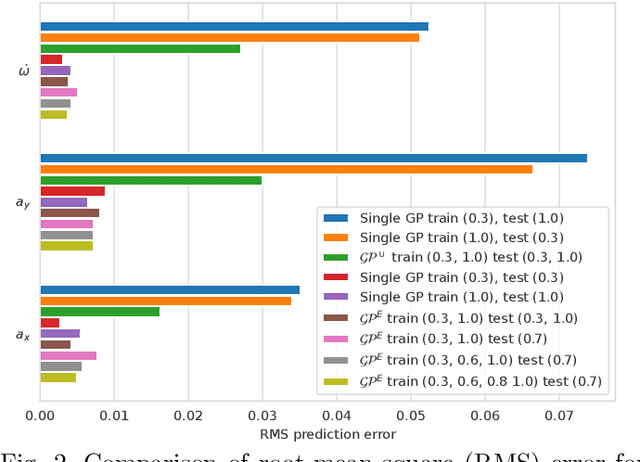
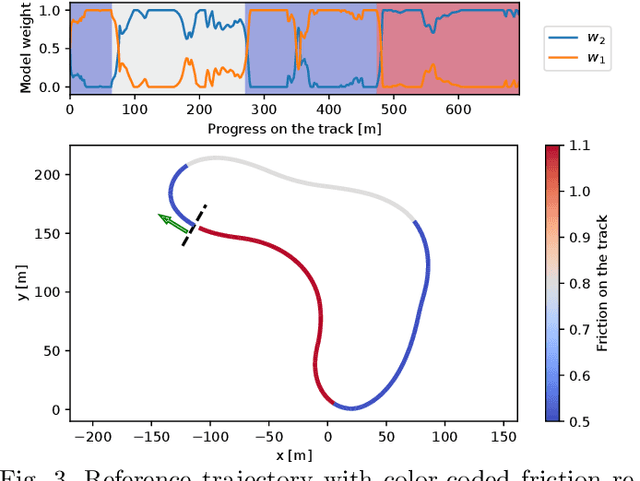
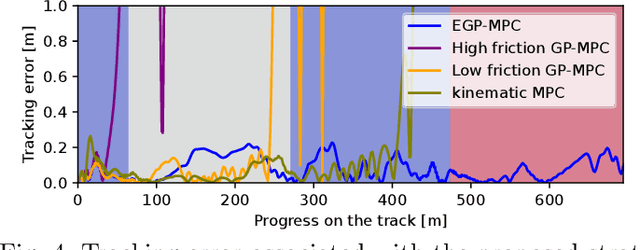
Driving under varying road conditions is challenging, especially for autonomous vehicles that must adapt in real-time to changes in the environment, e.g., rain, snow, etc. It is difficult to apply offline learning-based methods in these time-varying settings, as the controller should be trained on datasets representing all conditions it might encounter in the future. While online learning may adapt a model from real-time data, its convergence is often too slow for fast varying road conditions. We study this problem in autonomous racing, where driving at the limits of handling under varying road conditions is required for winning races. We propose a computationally-efficient approach that leverages an ensemble of Gaussian processes (GPs) to generalize and adapt pre-trained GPs to unseen conditions. Each GP is trained on driving data with a different road surface friction. A time-varying convex combination of these GPs is used within a model predictive control (MPC) framework, where the model weights are adapted online to the current road condition based on real-time data. The predictive variance of the ensemble Gaussian process (EGP) model allows the controller to account for prediction uncertainty and enables safe autonomous driving. Extensive simulations of a full scale autonomous car demonstrated the effectiveness of our proposed EGP-MPC method for providing good tracking performance in varying road conditions and the ability to generalize to unknown maps.
Towards Explainability in Modular Autonomous Vehicle Software
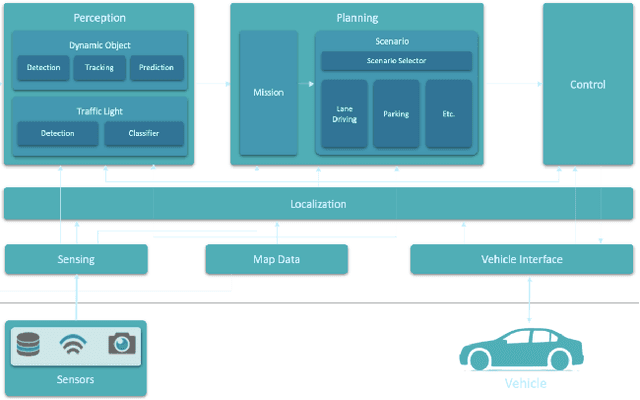
Dec 01, 2022Safety-critical Autonomous Systems require trustworthy and transparent decision-making process to be deployable in the real world. The advancement of Machine Learning introduces high performance but largely through black-box algorithms. We focus the discussion of explainability specifically with Autonomous Vehicles (AVs). As a safety-critical system, AVs provide the unique opportunity to utilize cutting-edge Machine Learning techniques while requiring transparency in decision making. Interpretability in every action the AV takes becomes crucial in post-hoc analysis where blame assignment might be necessary. In this paper, we provide positioning on how researchers could consider incorporating explainability and interpretability into design and optimization of separate Autonomous Vehicle modules including Perception, Planning, and Control.
Local_INN: Implicit Map Representation and Localization with Invertible Neural Networks
Sep 24, 2022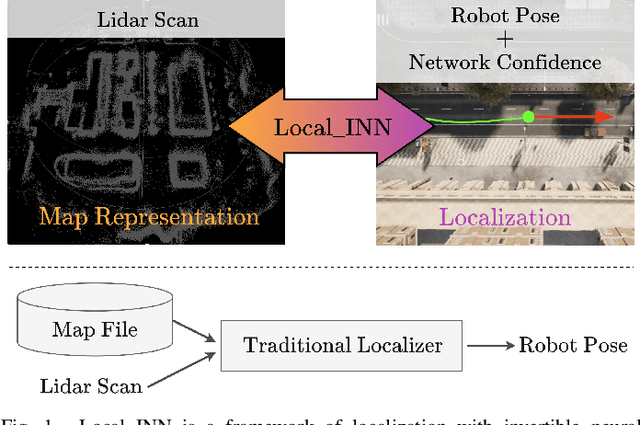
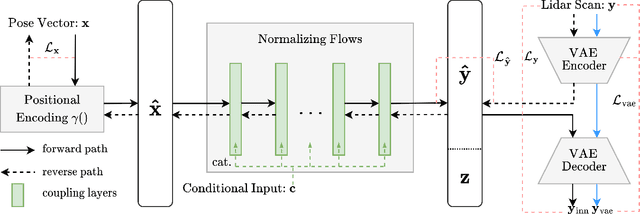
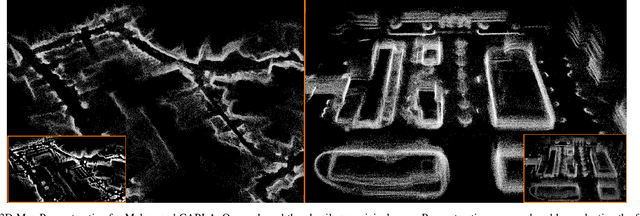
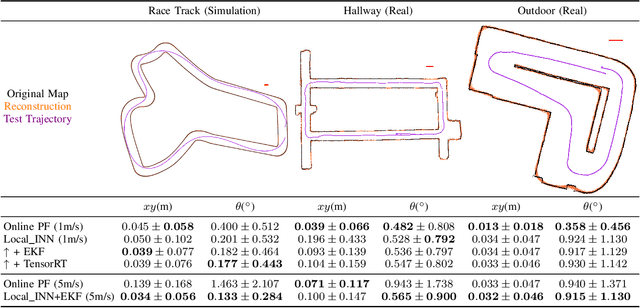
Robot localization is an inverse problem of finding a robot's pose using a map and sensor measurements. In recent years, Invertible Neural Networks (INNs) have successfully solved ambiguous inverse problems in various fields. This paper proposes a framework that solves the localization problem with INN. We design an INN that provides implicit map representation in the forward path and localization in the inverse path. By sampling the latent space in evaluation, Local\_INN outputs robot poses with covariance, which can be used to estimate the uncertainty. We show that the localization performance of Local\_INN is on par with current methods with much lower latency. We show detailed 2D and 3D map reconstruction from Local\_INN using poses exterior to the training set. We also provide a global localization algorithm using Local\_INN to tackle the kidnapping problem.
Teaching Autonomous Systems Hands-On: Leveraging Modular Small-Scale Hardware in the Robotics Classroom
Sep 21, 2022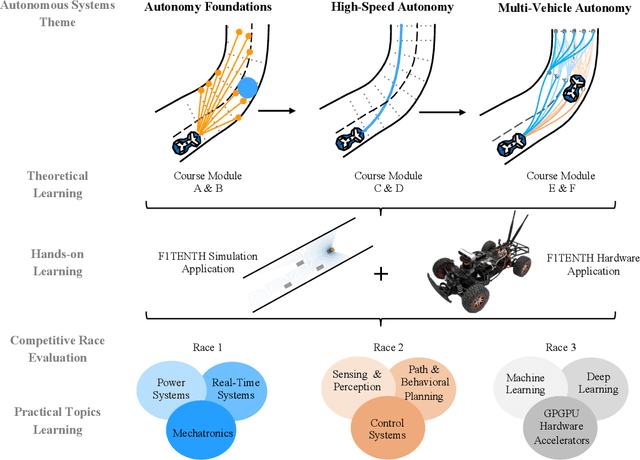
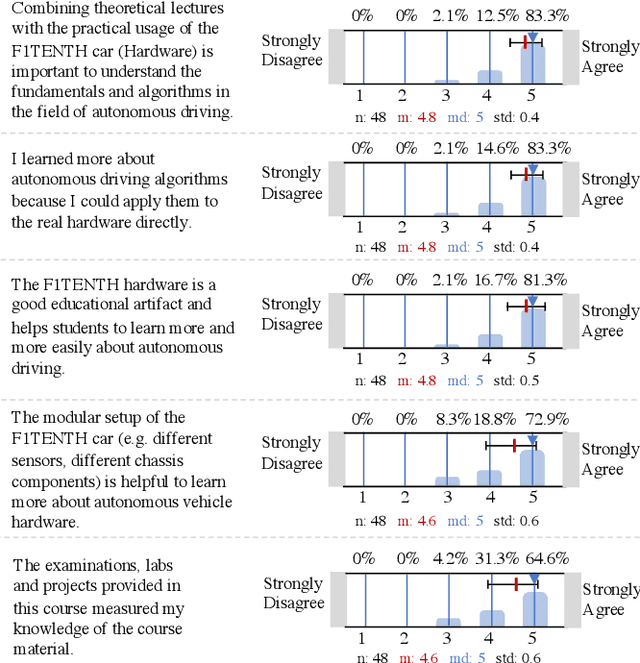
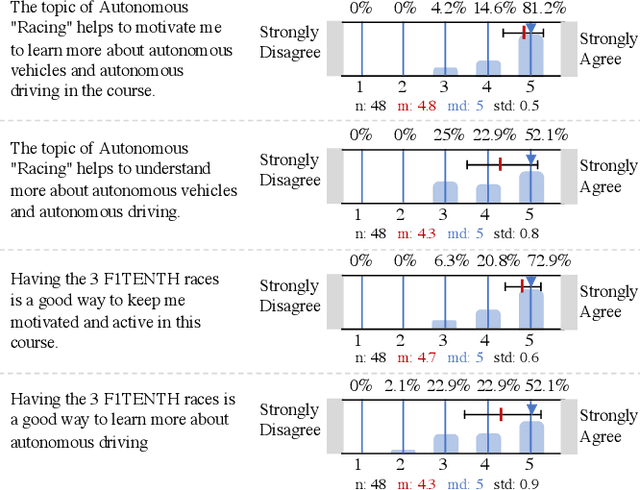
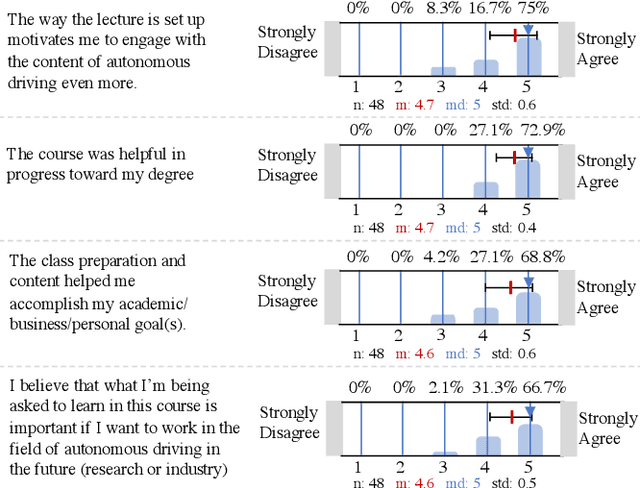
Although robotics courses are well established in higher education, the courses often focus on theory and sometimes lack the systematic coverage of the techniques involved in developing, deploying, and applying software to real hardware. Additionally, most hardware platforms for robotics teaching are low-level toys aimed at younger students at middle-school levels. To address this gap, an autonomous vehicle hardware platform, called F1TENTH, is developed for teaching autonomous systems hands-on. This article describes the teaching modules and software stack for teaching at various educational levels with the theme of "racing" and competitions that replace exams. The F1TENTH vehicles offer a modular hardware platform and its related software for teaching the fundamentals of autonomous driving algorithms. From basic reactive methods to advanced planning algorithms, the teaching modules enhance students' computational thinking through autonomous driving with the F1TENTH vehicle. The F1TENTH car fills the gap between research platforms and low-end toy cars and offers hands-on experience in learning the topics in autonomous systems. Four universities have adopted the teaching modules for their semester-long undergraduate and graduate courses for multiple years. Student feedback is used to analyze the effectiveness of the F1TENTH platform. More than 80% of the students strongly agree that the hardware platform and modules greatly motivate their learning, and more than 70% of the students strongly agree that the hardware-enhanced their understanding of the subjects. The survey results show that more than 80% of the students strongly agree that the competitions motivate them for the course.
Winning the 3rd Japan Automotive AI Challenge -- Autonomous Racing with the Autoware.Auto Open Source Software Stack
Jun 04, 2022
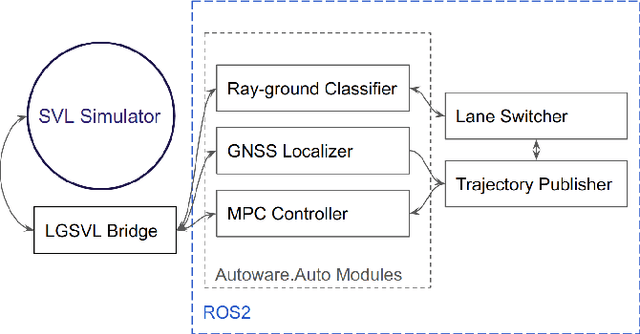
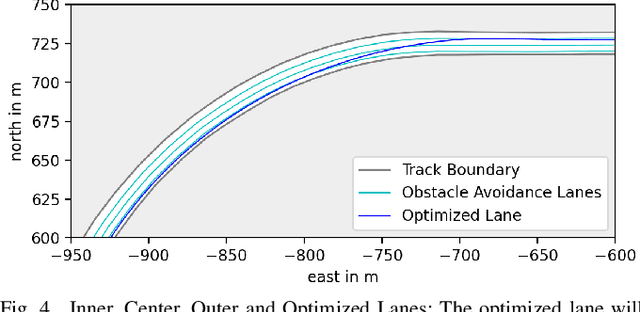
The 3rd Japan Automotive AI Challenge was an international online autonomous racing challenge where 164 teams competed in December 2021. This paper outlines the winning strategy to this competition, and the advantages and challenges of using the Autoware.Auto open source autonomous driving platform for multi-agent racing. Our winning approach includes a lane-switching opponent overtaking strategy, a global raceline optimization, and the integration of various tools from Autoware.Auto including a Model-Predictive Controller. We describe the use of perception, planning and control modules for high-speed racing applications and provide experience-based insights on working with Autoware.Auto. While our approach is a rule-based strategy that is suitable for non-interactive opponents, it provides a good reference and benchmark for learning-enabled approaches.