 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAV4EV: Open-Source Modular Autonomous Electric Vehicle Platform to Make Mobility Research Accessible
Dec 01, 2023


When academic researchers develop and validate autonomous driving algorithms, there is a challenge in balancing high-performance capabilities with the cost and complexity of the vehicle platform. Much of today's research on autonomous vehicles (AV) is limited to experimentation on expensive commercial vehicles that require large teams with diverse skills to retrofit the vehicles and test them in dedicated testing facilities. Testing the limits of safety and performance on such vehicles is costly and hazardous. It is also outside the reach of most academic departments and research groups. On the other hand, scaled-down 1/10th-1/16th scale vehicle platforms are more affordable but have limited similitude in dynamics, control, and drivability. To address this issue, we present the design of a one-third-scale autonomous electric go-kart platform with open-source mechatronics design along with fully-functional autonomous driving software. The platform's multi-modal driving system is capable of manual, autonomous, and teleoperation driving modes. It also features a flexible sensing suite for development and deployment of algorithms across perception, localization, planning, and control. This development serves as a bridge between full-scale vehicles and reduced-scale cars while accelerating cost-effective algorithmic advancements in autonomous systems research. Our experimental results demonstrate the AV4EV platform's capabilities and ease-of-use for developing new AV algorithms. All materials are available at AV4EV.org to stimulate collaborative efforts within the AV and electric vehicle (EV) communities.
Ensemble Gaussian Processes for Adaptive Autonomous Driving on Multi-friction Surfaces
Mar 23, 2023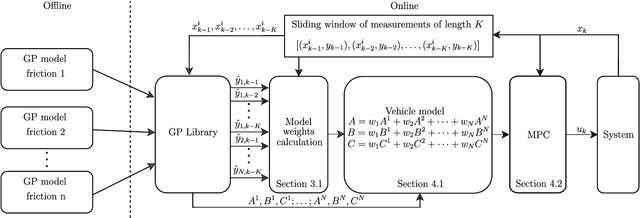
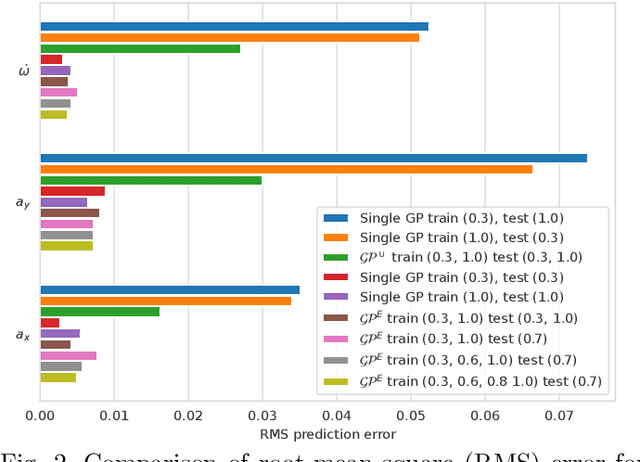
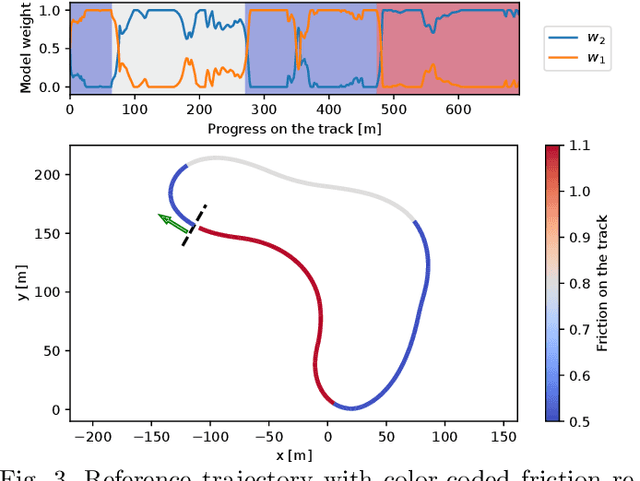
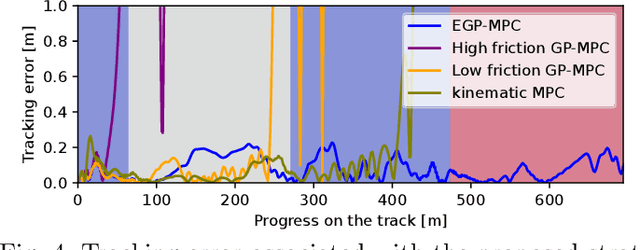
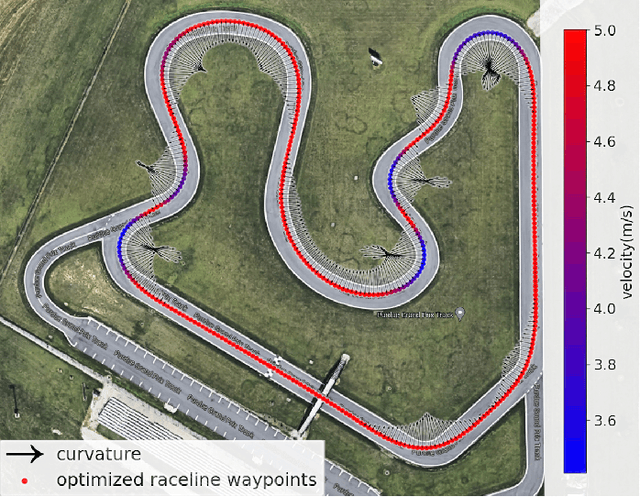
Driving under varying road conditions is challenging, especially for autonomous vehicles that must adapt in real-time to changes in the environment, e.g., rain, snow, etc. It is difficult to apply offline learning-based methods in these time-varying settings, as the controller should be trained on datasets representing all conditions it might encounter in the future. While online learning may adapt a model from real-time data, its convergence is often too slow for fast varying road conditions. We study this problem in autonomous racing, where driving at the limits of handling under varying road conditions is required for winning races. We propose a computationally-efficient approach that leverages an ensemble of Gaussian processes (GPs) to generalize and adapt pre-trained GPs to unseen conditions. Each GP is trained on driving data with a different road surface friction. A time-varying convex combination of these GPs is used within a model predictive control (MPC) framework, where the model weights are adapted online to the current road condition based on real-time data. The predictive variance of the ensemble Gaussian process (EGP) model allows the controller to account for prediction uncertainty and enables safe autonomous driving. Extensive simulations of a full scale autonomous car demonstrated the effectiveness of our proposed EGP-MPC method for providing good tracking performance in varying road conditions and the ability to generalize to unknown maps.