 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCountCLIP -- Teaching CLIP to Count to Ten
Jun 05, 2024



Large vision-language models (VLMs) are shown to learn rich joint image-text representations enabling high performances in relevant downstream tasks. However, they fail to showcase their quantitative understanding of objects, and they lack good counting-aware representation. This paper conducts a reproducibility study of 'Teaching CLIP to Count to Ten' (Paiss et al., 2023), which presents a method to finetune a CLIP model (Radford et al., 2021) to improve zero-shot counting accuracy in an image while maintaining the performance for zero-shot classification by introducing a counting-contrastive loss term. We improve the model's performance on a smaller subset of their training data with lower computational resources. We verify these claims by reproducing their study with our own code. The implementation can be found at https://github.com/SforAiDl/CountCLIP.
AV4EV: Open-Source Modular Autonomous Electric Vehicle Platform to Make Mobility Research Accessible
Dec 01, 2023


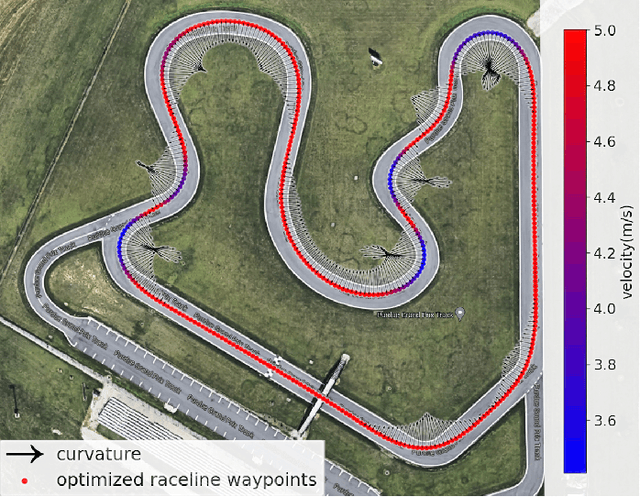
When academic researchers develop and validate autonomous driving algorithms, there is a challenge in balancing high-performance capabilities with the cost and complexity of the vehicle platform. Much of today's research on autonomous vehicles (AV) is limited to experimentation on expensive commercial vehicles that require large teams with diverse skills to retrofit the vehicles and test them in dedicated testing facilities. Testing the limits of safety and performance on such vehicles is costly and hazardous. It is also outside the reach of most academic departments and research groups. On the other hand, scaled-down 1/10th-1/16th scale vehicle platforms are more affordable but have limited similitude in dynamics, control, and drivability. To address this issue, we present the design of a one-third-scale autonomous electric go-kart platform with open-source mechatronics design along with fully-functional autonomous driving software. The platform's multi-modal driving system is capable of manual, autonomous, and teleoperation driving modes. It also features a flexible sensing suite for development and deployment of algorithms across perception, localization, planning, and control. This development serves as a bridge between full-scale vehicles and reduced-scale cars while accelerating cost-effective algorithmic advancements in autonomous systems research. Our experimental results demonstrate the AV4EV platform's capabilities and ease-of-use for developing new AV algorithms. All materials are available at AV4EV.org to stimulate collaborative efforts within the AV and electric vehicle (EV) communities.