 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgenuCarla: A nuScenes-Style Bird's-Eye View Perception Dataset for CARLA Simulation
Nov 12, 2025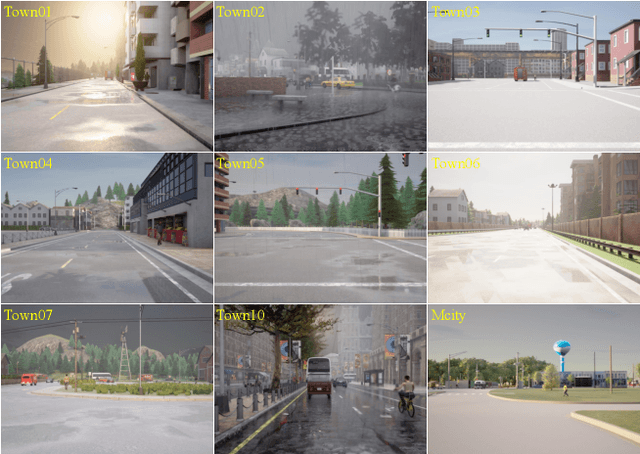

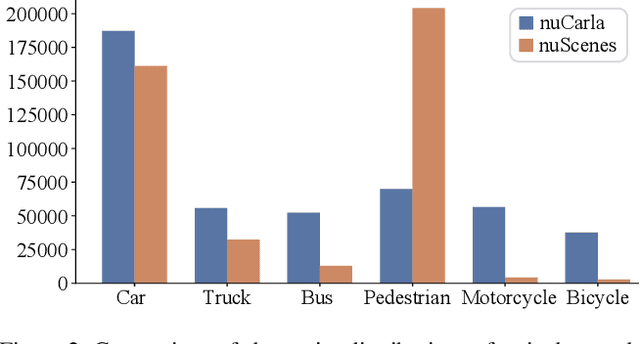

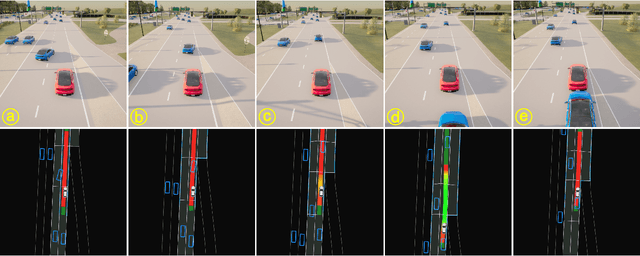
End-to-end (E2E) autonomous driving heavily relies on closed-loop simulation, where perception, planning, and control are jointly trained and evaluated in interactive environments. Yet, most existing datasets are collected from the real world under non-interactive conditions, primarily supporting open-loop learning while offering limited value for closed-loop testing. Due to the lack of standardized, large-scale, and thoroughly verified datasets to facilitate learning of meaningful intermediate representations, such as bird's-eye-view (BEV) features, closed-loop E2E models remain far behind even simple rule-based baselines. To address this challenge, we introduce nuCarla, a large-scale, nuScenes-style BEV perception dataset built within the CARLA simulator. nuCarla features (1) full compatibility with the nuScenes format, enabling seamless transfer of real-world perception models; (2) a dataset scale comparable to nuScenes, but with more balanced class distributions; (3) direct usability for closed-loop simulation deployment; and (4) high-performance BEV backbones that achieve state-of-the-art detection results. By providing both data and models as open benchmarks, nuCarla substantially accelerates closed-loop E2E development, paving the way toward reliable and safety-aware research in autonomous driving.
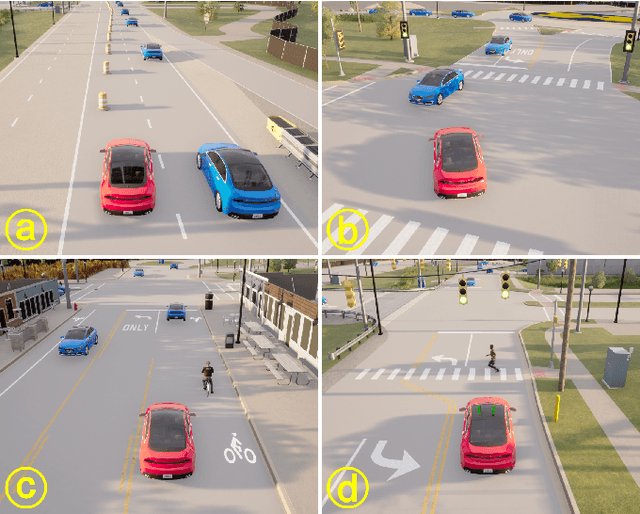
Behavioral Safety Assessment towards Large-scale Deployment of Autonomous Vehicles
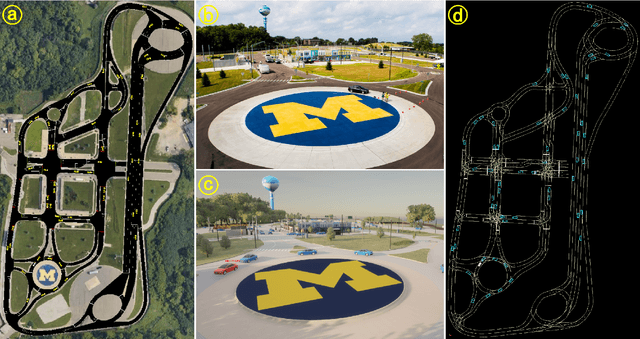
May 22, 2025Autonomous vehicles (AVs) have significantly advanced in real-world deployment in recent years, yet safety continues to be a critical barrier to widespread adoption. Traditional functional safety approaches, which primarily verify the reliability, robustness, and adequacy of AV hardware and software systems from a vehicle-centric perspective, do not sufficiently address the AV's broader interactions and behavioral impact on the surrounding traffic environment. To overcome this limitation, we propose a paradigm shift toward behavioral safety, a comprehensive approach focused on evaluating AV responses and interactions within the traffic environment. To systematically assess behavioral safety, we introduce a third-party AV safety assessment framework comprising two complementary evaluation components: the Driver Licensing Test and the Driving Intelligence Test. The Driver Licensing Test evaluates the AV's reactive behaviors under controlled scenarios, ensuring basic behavioral competency. In contrast, the Driving Intelligence Test assesses the AV's interactive behaviors within naturalistic traffic conditions, quantifying the frequency of safety-critical events to deliver statistically meaningful safety metrics before large-scale deployment. We validated our proposed framework using Autoware.Universe, an open-source Level 4 AV, tested both in simulated environments and on the physical test track at the University of Michigan's Mcity Testing Facility. The results indicate that Autoware.Universe passed 6 out of 14 scenarios and exhibited a crash rate of 3.01e-3 crashes per mile, approximately 1,000 times higher than the average human driver crash rate. During the tests, we also uncovered several unknown unsafe scenarios for Autoware.Universe. These findings underscore the necessity of behavioral safety evaluations for improving AV safety performance prior to widespread public deployment.
LightEMMA: Lightweight End-to-End Multimodal Model for Autonomous Driving
May 01, 2025Vision-Language Models (VLMs) have demonstrated significant potential for end-to-end autonomous driving. However, fully exploiting their capabilities for safe and reliable vehicle control remains an open research challenge. To systematically examine advances and limitations of VLMs in driving tasks, we introduce LightEMMA, a Lightweight End-to-End Multimodal Model for Autonomous driving. LightEMMA provides a unified, VLM-based autonomous driving framework without ad hoc customizations, enabling easy integration and evaluation of evolving state-of-the-art commercial and open-source models. We construct twelve autonomous driving agents using various VLMs and evaluate their performance on the nuScenes prediction task, comprehensively assessing metrics such as inference time, computational cost, and predictive accuracy. Illustrative examples highlight that, despite their strong scenario interpretation capabilities, VLMs' practical performance in autonomous driving tasks remains concerning, emphasizing the need for further improvements. The code is available at https://github.com/michigan-traffic-lab/LightEMMA.
TeraSim: Uncovering Unknown Unsafe Events for Autonomous Vehicles through Generative Simulation
Mar 06, 2025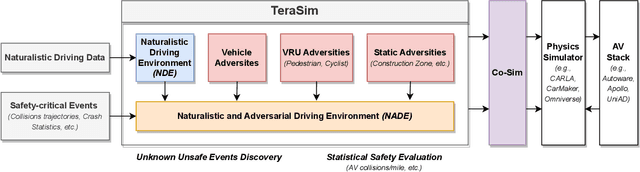
Traffic simulation is essential for autonomous vehicle (AV) development, enabling comprehensive safety evaluation across diverse driving conditions. However, traditional rule-based simulators struggle to capture complex human interactions, while data-driven approaches often fail to maintain long-term behavioral realism or generate diverse safety-critical events. To address these challenges, we propose TeraSim, an open-source, high-fidelity traffic simulation platform designed to uncover unknown unsafe events and efficiently estimate AV statistical performance metrics, such as crash rates. TeraSim is designed for seamless integration with third-party physics simulators and standalone AV stacks, to construct a complete AV simulation system. Experimental results demonstrate its effectiveness in generating diverse safety-critical events involving both static and dynamic agents, identifying hidden deficiencies in AV systems, and enabling statistical performance evaluation. These findings highlight TeraSim's potential as a practical tool for AV safety assessment, benefiting researchers, developers, and policymakers. The code is available at https://github.com/mcity/TeraSim.
AV4EV: Open-Source Modular Autonomous Electric Vehicle Platform to Make Mobility Research Accessible
Dec 01, 2023


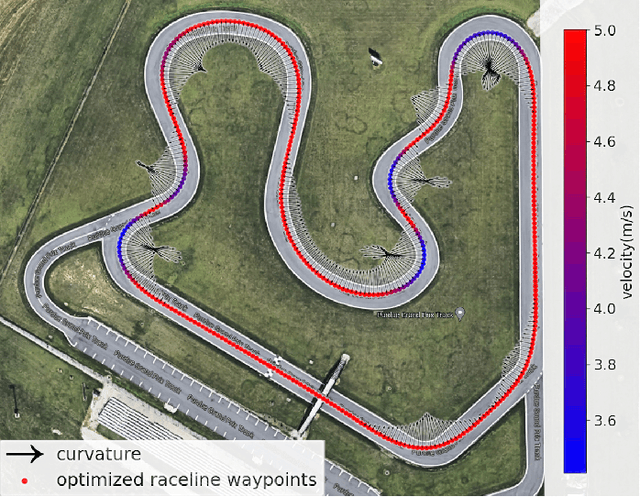
When academic researchers develop and validate autonomous driving algorithms, there is a challenge in balancing high-performance capabilities with the cost and complexity of the vehicle platform. Much of today's research on autonomous vehicles (AV) is limited to experimentation on expensive commercial vehicles that require large teams with diverse skills to retrofit the vehicles and test them in dedicated testing facilities. Testing the limits of safety and performance on such vehicles is costly and hazardous. It is also outside the reach of most academic departments and research groups. On the other hand, scaled-down 1/10th-1/16th scale vehicle platforms are more affordable but have limited similitude in dynamics, control, and drivability. To address this issue, we present the design of a one-third-scale autonomous electric go-kart platform with open-source mechatronics design along with fully-functional autonomous driving software. The platform's multi-modal driving system is capable of manual, autonomous, and teleoperation driving modes. It also features a flexible sensing suite for development and deployment of algorithms across perception, localization, planning, and control. This development serves as a bridge between full-scale vehicles and reduced-scale cars while accelerating cost-effective algorithmic advancements in autonomous systems research. Our experimental results demonstrate the AV4EV platform's capabilities and ease-of-use for developing new AV algorithms. All materials are available at AV4EV.org to stimulate collaborative efforts within the AV and electric vehicle (EV) communities.
Holonomic Control of Arbitrary Configurations of Docked Modboats
Nov 29, 2022The Modboat is a low-cost, underactuated, modular robot capable of surface swimming, docking to other modules, and undocking from them using only a single motor and two passive flippers. Undocking is achieved by causing intentional self-collision between the tails of neighboring modules in certain configurations; this becomes a challenge, however, when collective swimming as one connected component is desirable. Prior work has developed controllers that turn arbitrary configurations of docked Modboats into steerable vehicles, but they cannot counteract lateral forces and disturbances. In this work we present a centralized control strategy to create holonomic vehicles out of arbitrary configurations of docked Modboats using an iterative potential-field based search. We experimentally demonstrate that our controller performs well and can control surge and sway velocities and yaw angle simultaneously.