 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Traffic Signal Data Quality for the Waymo Open Motion Dataset
Jun 08, 2025Datasets pertaining to autonomous vehicles (AVs) hold significant promise for a range of research fields, including artificial intelligence (AI), autonomous driving, and transportation engineering. Nonetheless, these datasets often encounter challenges related to the states of traffic signals, such as missing or inaccurate data. Such issues can compromise the reliability of the datasets and adversely affect the performance of models developed using them. This research introduces a fully automated approach designed to tackle these issues by utilizing available vehicle trajectory data alongside knowledge from the transportation domain to effectively impute and rectify traffic signal information within the Waymo Open Motion Dataset (WOMD). The proposed method is robust and flexible, capable of handling diverse intersection geometries and traffic signal configurations in real-world scenarios. Comprehensive validations have been conducted on the entire WOMD, focusing on over 360,000 relevant scenarios involving traffic signals, out of a total of 530,000 real-world driving scenarios. In the original dataset, 71.7% of traffic signal states are either missing or unknown, all of which were successfully imputed by our proposed method. Furthermore, in the absence of ground-truth signal states, the accuracy of our approach is evaluated based on the rate of red-light violations among vehicle trajectories. Results show that our method reduces the estimated red-light running rate from 15.7% in the original data to 2.9%, thereby demonstrating its efficacy in rectifying data inaccuracies. This paper significantly enhances the quality of AV datasets, contributing to the wider AI and AV research communities and benefiting various downstream applications. The code and improved traffic signal data are open-sourced at https://github.com/michigan-traffic-lab/WOMD-Traffic-Signal-Data-Improvement
Behavioral Safety Assessment towards Large-scale Deployment of Autonomous Vehicles
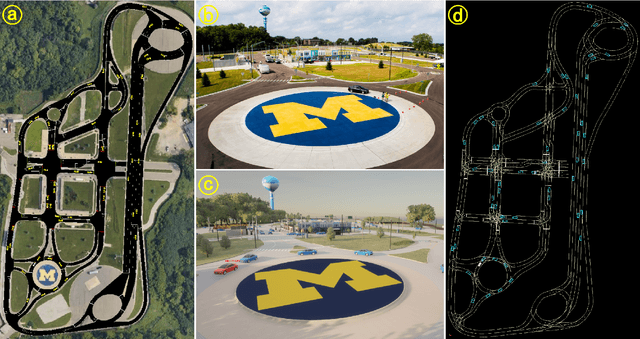
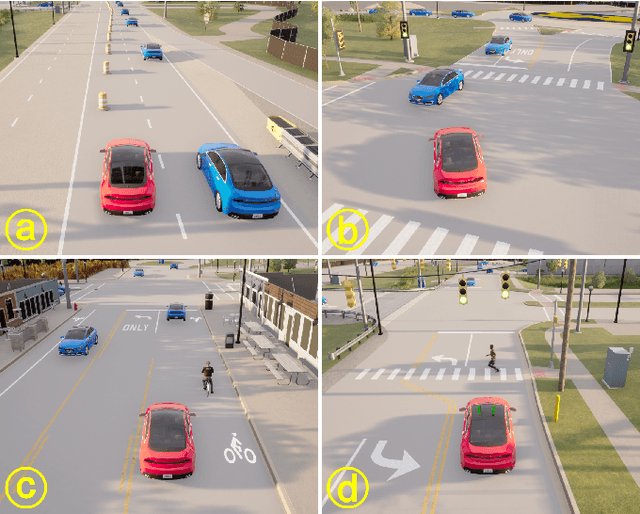
May 22, 2025Autonomous vehicles (AVs) have significantly advanced in real-world deployment in recent years, yet safety continues to be a critical barrier to widespread adoption. Traditional functional safety approaches, which primarily verify the reliability, robustness, and adequacy of AV hardware and software systems from a vehicle-centric perspective, do not sufficiently address the AV's broader interactions and behavioral impact on the surrounding traffic environment. To overcome this limitation, we propose a paradigm shift toward behavioral safety, a comprehensive approach focused on evaluating AV responses and interactions within the traffic environment. To systematically assess behavioral safety, we introduce a third-party AV safety assessment framework comprising two complementary evaluation components: the Driver Licensing Test and the Driving Intelligence Test. The Driver Licensing Test evaluates the AV's reactive behaviors under controlled scenarios, ensuring basic behavioral competency. In contrast, the Driving Intelligence Test assesses the AV's interactive behaviors within naturalistic traffic conditions, quantifying the frequency of safety-critical events to deliver statistically meaningful safety metrics before large-scale deployment. We validated our proposed framework using Autoware.Universe, an open-source Level 4 AV, tested both in simulated environments and on the physical test track at the University of Michigan's Mcity Testing Facility. The results indicate that Autoware.Universe passed 6 out of 14 scenarios and exhibited a crash rate of 3.01e-3 crashes per mile, approximately 1,000 times higher than the average human driver crash rate. During the tests, we also uncovered several unknown unsafe scenarios for Autoware.Universe. These findings underscore the necessity of behavioral safety evaluations for improving AV safety performance prior to widespread public deployment.
TeraSim: Uncovering Unknown Unsafe Events for Autonomous Vehicles through Generative Simulation
Mar 06, 2025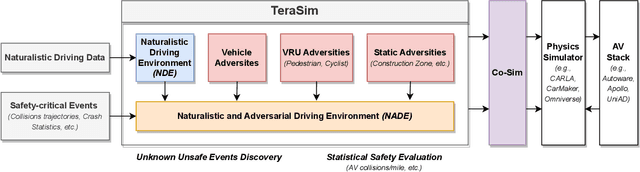
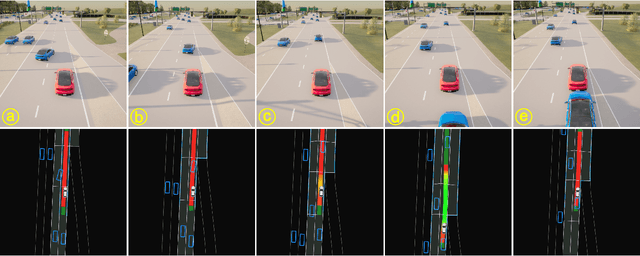
Traffic simulation is essential for autonomous vehicle (AV) development, enabling comprehensive safety evaluation across diverse driving conditions. However, traditional rule-based simulators struggle to capture complex human interactions, while data-driven approaches often fail to maintain long-term behavioral realism or generate diverse safety-critical events. To address these challenges, we propose TeraSim, an open-source, high-fidelity traffic simulation platform designed to uncover unknown unsafe events and efficiently estimate AV statistical performance metrics, such as crash rates. TeraSim is designed for seamless integration with third-party physics simulators and standalone AV stacks, to construct a complete AV simulation system. Experimental results demonstrate its effectiveness in generating diverse safety-critical events involving both static and dynamic agents, identifying hidden deficiencies in AV systems, and enabling statistical performance evaluation. These findings highlight TeraSim's potential as a practical tool for AV safety assessment, benefiting researchers, developers, and policymakers. The code is available at https://github.com/mcity/TeraSim.
DECODE: Domain-aware Continual Domain Expansion for Motion Prediction
Nov 26, 2024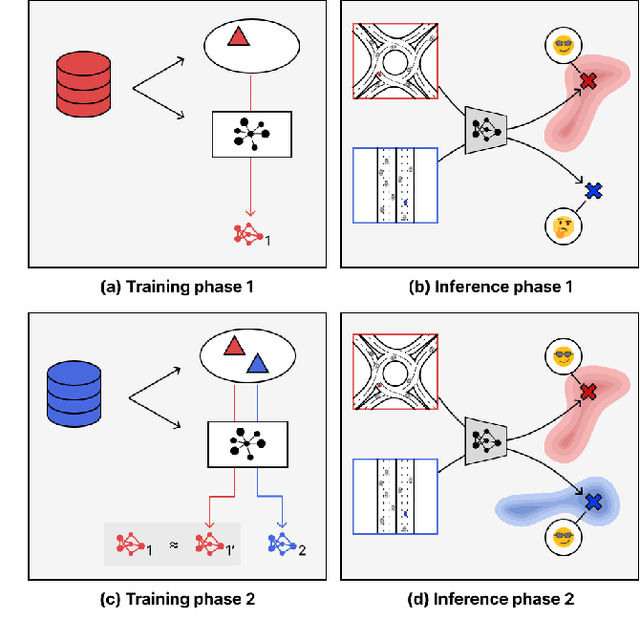
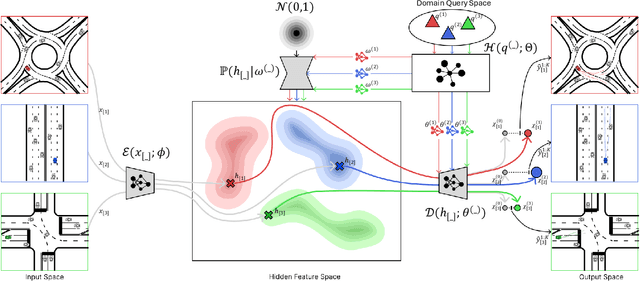
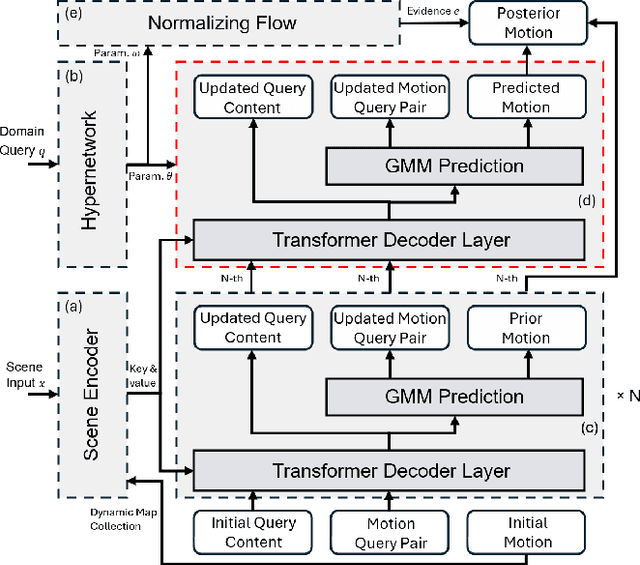
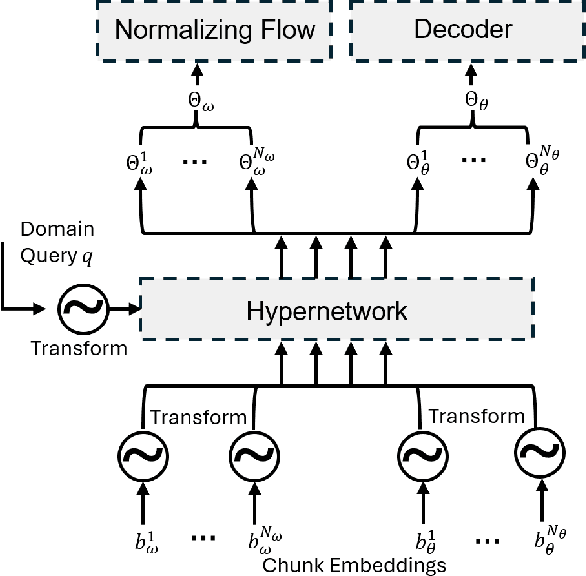
Motion prediction is critical for autonomous vehicles to effectively navigate complex environments and accurately anticipate the behaviors of other traffic participants. As autonomous driving continues to evolve, the need to assimilate new and varied driving scenarios necessitates frequent model updates through retraining. To address these demands, we introduce DECODE, a novel continual learning framework that begins with a pre-trained generalized model and incrementally develops specialized models for distinct domains. Unlike existing continual learning approaches that attempt to develop a unified model capable of generalizing across diverse scenarios, DECODE uniquely balances specialization with generalization, dynamically adjusting to real-time demands. The proposed framework leverages a hypernetwork to generate model parameters, significantly reducing storage requirements, and incorporates a normalizing flow mechanism for real-time model selection based on likelihood estimation. Furthermore, DECODE merges outputs from the most relevant specialized and generalized models using deep Bayesian uncertainty estimation techniques. This integration ensures optimal performance in familiar conditions while maintaining robustness in unfamiliar scenarios. Extensive evaluations confirm the effectiveness of the framework, achieving a notably low forgetting rate of 0.044 and an average minADE of 0.584 m, significantly surpassing traditional learning strategies and demonstrating adaptability across a wide range of driving conditions.