 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTeraSim-World: Worldwide Safety-Critical Data Synthesis for End-to-End Autonomous Driving
Sep 16, 2025Safe and scalable deployment of end-to-end (E2E) autonomous driving requires extensive and diverse data, particularly safety-critical events. Existing data are mostly generated from simulators with a significant sim-to-real gap or collected from on-road testing that is costly and unsafe. This paper presents TeraSim-World, an automated pipeline that synthesizes realistic and geographically diverse safety-critical data for E2E autonomous driving at anywhere in the world. Starting from an arbitrary location, TeraSim-World retrieves real-world maps and traffic demand from geospatial data sources. Then, it simulates agent behaviors from naturalistic driving datasets, and orchestrates diverse adversities to create corner cases. Informed by street views of the same location, it achieves photorealistic, geographically grounded sensor rendering via the frontier video generation model Cosmos-Drive. By bridging agent and sensor simulations, TeraSim-World provides a scalable and critical~data synthesis framework for training and evaluation of E2E autonomous driving systems.
Behavioral Safety Assessment towards Large-scale Deployment of Autonomous Vehicles
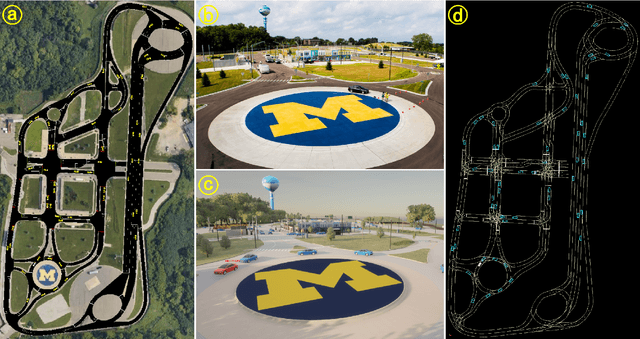
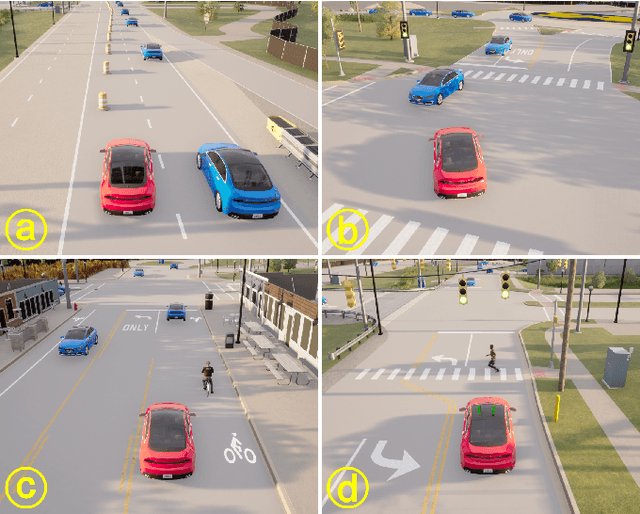
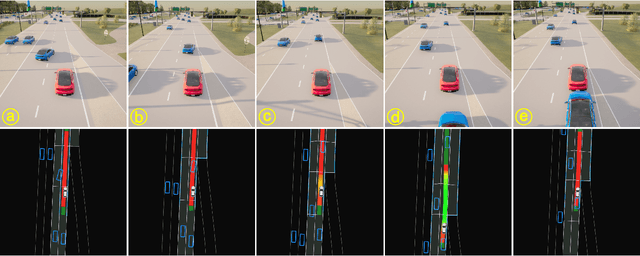
May 22, 2025Autonomous vehicles (AVs) have significantly advanced in real-world deployment in recent years, yet safety continues to be a critical barrier to widespread adoption. Traditional functional safety approaches, which primarily verify the reliability, robustness, and adequacy of AV hardware and software systems from a vehicle-centric perspective, do not sufficiently address the AV's broader interactions and behavioral impact on the surrounding traffic environment. To overcome this limitation, we propose a paradigm shift toward behavioral safety, a comprehensive approach focused on evaluating AV responses and interactions within the traffic environment. To systematically assess behavioral safety, we introduce a third-party AV safety assessment framework comprising two complementary evaluation components: the Driver Licensing Test and the Driving Intelligence Test. The Driver Licensing Test evaluates the AV's reactive behaviors under controlled scenarios, ensuring basic behavioral competency. In contrast, the Driving Intelligence Test assesses the AV's interactive behaviors within naturalistic traffic conditions, quantifying the frequency of safety-critical events to deliver statistically meaningful safety metrics before large-scale deployment. We validated our proposed framework using Autoware.Universe, an open-source Level 4 AV, tested both in simulated environments and on the physical test track at the University of Michigan's Mcity Testing Facility. The results indicate that Autoware.Universe passed 6 out of 14 scenarios and exhibited a crash rate of 3.01e-3 crashes per mile, approximately 1,000 times higher than the average human driver crash rate. During the tests, we also uncovered several unknown unsafe scenarios for Autoware.Universe. These findings underscore the necessity of behavioral safety evaluations for improving AV safety performance prior to widespread public deployment.
RADE: Learning Risk-Adjustable Driving Environment via Multi-Agent Conditional Diffusion
May 06, 2025Generating safety-critical scenarios in high-fidelity simulations offers a promising and cost-effective approach for efficient testing of autonomous vehicles. Existing methods typically rely on manipulating a single vehicle's trajectory through sophisticated designed objectives to induce adversarial interactions, often at the cost of realism and scalability. In this work, we propose the Risk-Adjustable Driving Environment (RADE), a simulation framework that generates statistically realistic and risk-adjustable traffic scenes. Built upon a multi-agent diffusion architecture, RADE jointly models the behavior of all agents in the environment and conditions their trajectories on a surrogate risk measure. Unlike traditional adversarial methods, RADE learns risk-conditioned behaviors directly from data, preserving naturalistic multi-agent interactions with controllable risk levels. To ensure physical plausibility, we incorporate a tokenized dynamics check module that efficiently filters generated trajectories using a motion vocabulary. We validate RADE on the real-world rounD dataset, demonstrating that it preserves statistical realism across varying risk levels and naturally increases the likelihood of safety-critical events as the desired risk level grows up. Our results highlight RADE's potential as a scalable and realistic tool for AV safety evaluation.
TeraSim: Uncovering Unknown Unsafe Events for Autonomous Vehicles through Generative Simulation
Mar 06, 2025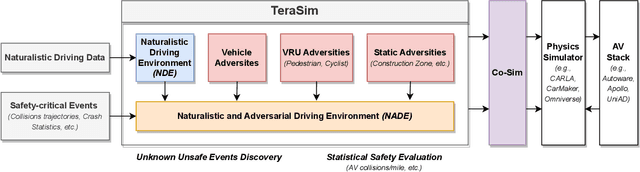
Traffic simulation is essential for autonomous vehicle (AV) development, enabling comprehensive safety evaluation across diverse driving conditions. However, traditional rule-based simulators struggle to capture complex human interactions, while data-driven approaches often fail to maintain long-term behavioral realism or generate diverse safety-critical events. To address these challenges, we propose TeraSim, an open-source, high-fidelity traffic simulation platform designed to uncover unknown unsafe events and efficiently estimate AV statistical performance metrics, such as crash rates. TeraSim is designed for seamless integration with third-party physics simulators and standalone AV stacks, to construct a complete AV simulation system. Experimental results demonstrate its effectiveness in generating diverse safety-critical events involving both static and dynamic agents, identifying hidden deficiencies in AV systems, and enabling statistical performance evaluation. These findings highlight TeraSim's potential as a practical tool for AV safety assessment, benefiting researchers, developers, and policymakers. The code is available at https://github.com/mcity/TeraSim.
A Cross-Scene Benchmark for Open-World Drone Active Tracking
Dec 01, 2024Drone Visual Active Tracking aims to autonomously follow a target object by controlling the motion system based on visual observations, providing a more practical solution for effective tracking in dynamic environments. However, accurate Drone Visual Active Tracking using reinforcement learning remains challenging due to the absence of a unified benchmark, the complexity of open-world environments with frequent interference, and the diverse motion behavior of dynamic targets. To address these issues, we propose a unified cross-scene cross-domain benchmark for open-world drone active tracking called DAT. The DAT benchmark provides 24 visually complex environments to assess the algorithms' cross-scene and cross-domain generalization abilities, and high-fidelity modeling of realistic robot dynamics. Additionally, we propose a reinforcement learning-based drone tracking method called R-VAT, which aims to improve the performance of drone tracking targets in complex scenarios. Specifically, inspired by curriculum learning, we introduce a Curriculum-Based Training strategy that progressively enhances the agent tracking performance in vast environments with complex interference. We design a goal-centered reward function to provide precise feedback to the drone agent, preventing targets farther from the center of view from receiving higher rewards than closer ones. This allows the drone to adapt to the diverse motion behavior of open-world targets. Experiments demonstrate that the R-VAT has about 400% improvement over the SOTA method in terms of the cumulative reward metric.
Corner Case Generation and Analysis for Safety Assessment of Autonomous Vehicles
Feb 06, 2021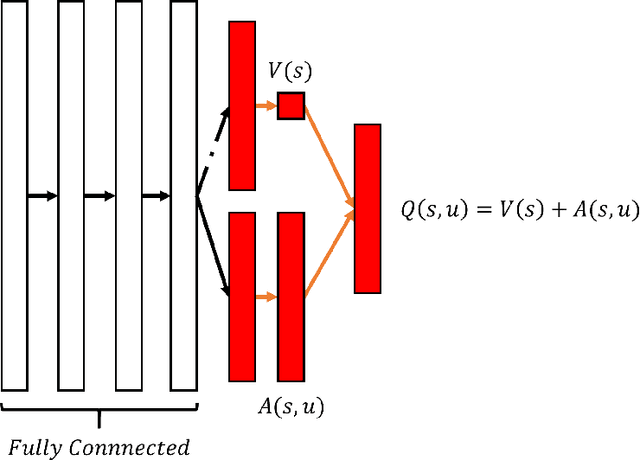
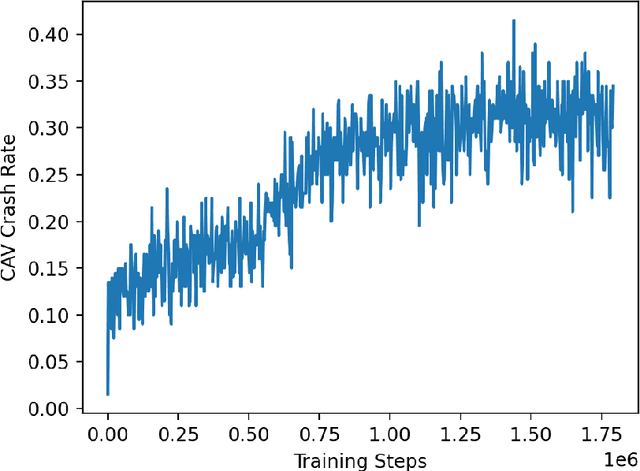
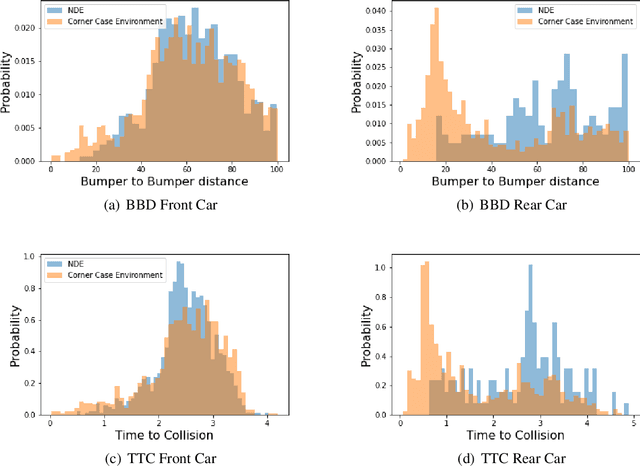

Testing and evaluation is a crucial step in the development and deployment of Connected and Automated Vehicles (CAVs). To comprehensively evaluate the performance of CAVs, it is of necessity to test the CAVs in safety-critical scenarios, which rarely happen in naturalistic driving environment. Therefore, how to purposely and systematically generate these corner cases becomes an important problem. Most existing studies focus on generating adversarial examples for perception systems of CAVs, whereas limited efforts have been put on the decision-making systems, which is the highlight of this paper. As the CAVs need to interact with numerous background vehicles (BVs) for a long duration, variables that define the corner cases are usually high dimensional, which makes the generation a challenging problem. In this paper, a unified framework is proposed to generate corner cases for the decision-making systems. To address the challenge brought by high dimensionality, the driving environment is formulated based on Markov Decision Process, and the deep reinforcement learning techniques are applied to learn the behavior policy of BVs. With the learned policy, BVs will behave and interact with the CAVs more aggressively, resulting in more corner cases. To further analyze the generated corner cases, the techniques of feature extraction and clustering are utilized. By selecting representative cases of each cluster and outliers, the valuable corner cases can be identified from all generated corner cases. Simulation results of a highway driving environment show that the proposed methods can effectively generate and identify the valuable corner cases.
Distributionally Consistent Simulation of Naturalistic Driving Environment for Autonomous Vehicle Testing
Jan 08, 2021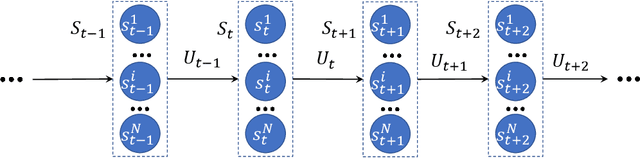

Microscopic traffic simulation provides a controllable, repeatable, and efficient testing environment for autonomous vehicles (AVs). To evaluate AVs' safety performance unbiasedly, ideally, the probability distributions of the joint state space of all vehicles in the simulated naturalistic driving environment (NDE) needs to be consistent with those from the real-world driving environment. However, although human driving behaviors have been extensively investigated in the transportation engineering field, most existing models were developed for traffic flow analysis without consideration of distributional consistency of driving behaviors, which may cause significant evaluation biasedness for AV testing. To fill this research gap, a distributionally consistent NDE modeling framework is proposed. Using large-scale naturalistic driving data, empirical distributions are obtained to construct the stochastic human driving behavior models under different conditions, which serve as the basic behavior models. To reduce the model errors caused by the limited data quantity and mitigate the error accumulation problem during the simulation, an optimization framework is designed to further enhance the basic models. Specifically, the vehicle state evolution is modeled as a Markov chain and its stationary distribution is twisted to match the distribution from the real-world driving environment. In the case study of highway driving environment using real-world naturalistic driving data, the distributional accuracy of the generated NDE is validated. The generated NDE is further utilized to test the safety performance of an AV model to validate its effectiveness.
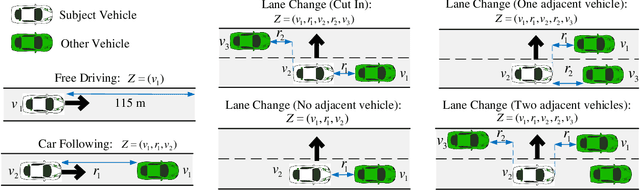
Testing Scenario Library Generation for Connected and Automated Vehicles, Part II: Case Studies
May 09, 2019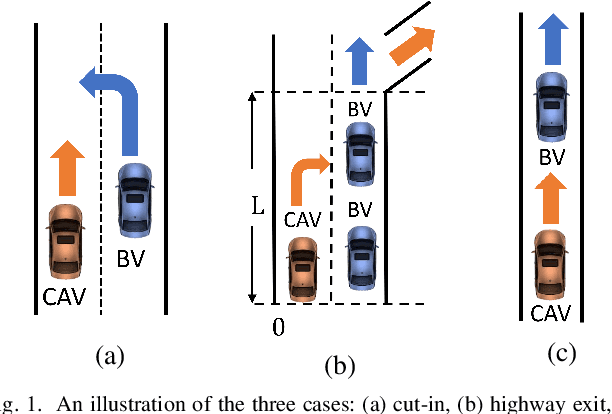
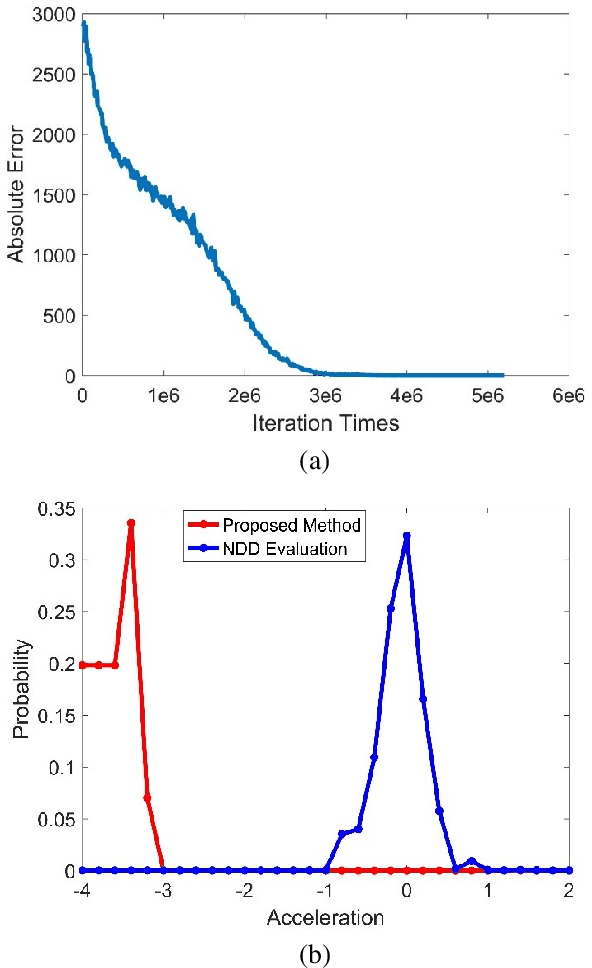
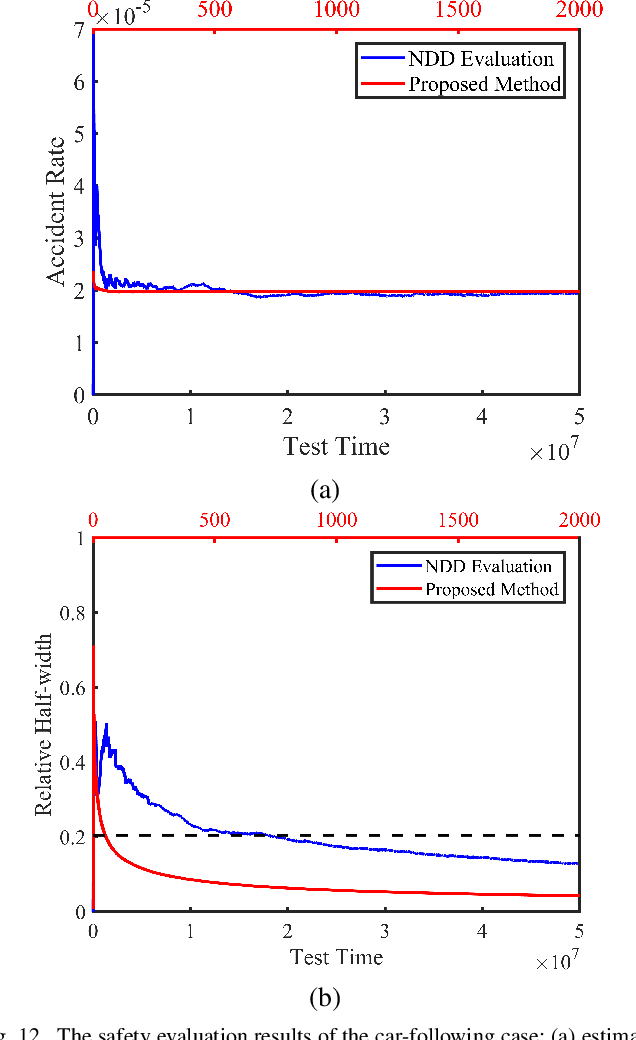
Testing and evaluation is a critical step in the development and deployment of connected and automated vehicles (CAVs), and yet there is no systematic framework to generate testing scenario library. In Part I of the paper, a general framework is proposed to solve the testing scenario library generation (TSLG) problem with four associated research questions. The methodologies of solving each research question have been proposed and analyzed theoretically. In Part II of the paper, three case studies are designed and implemented to demonstrate the proposed methodologies. First, a cut-in case is designed for safety evaluation and to provide answers to three particular questions in the framework, i.e., auxiliary objective function design, naturalistic driving data (NDD) analysis, and surrogate model (SM) construction. Second, a highway exit case is designed for functionality evaluation. Third, a car-following case is designed to show the ability of the proposed methods in handling high-dimensional scenarios. To address the challenges brought by higher dimensions, the proposed methods are enhanced by reinforcement learning (RL) techniques. Typical CAV models are chosen and evaluated by simulations. Results show that the proposed methods can accelerate the CAV evaluation process by $255$ to $3.75\times10^5$ times compared with the public road test method, with same accuracy of indices.