 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProtoDCS: Towards Robust and Efficient Open-Set Test-Time Adaptation for Vision-Language Models
Feb 27, 2026Large-scale Vision-Language Models (VLMs) exhibit strong zero-shot recognition, yet their real-world deployment is challenged by distribution shifts. While Test-Time Adaptation (TTA) can mitigate this, existing VLM-based TTA methods operate under a closed-set assumption, failing in open-set scenarios where test streams contain both covariate-shifted in-distribution (csID) and out-of-distribution (csOOD) data. This leads to a critical difficulty: the model must discriminate unknown csOOD samples to avoid interference while simultaneously adapting to known csID classes for accuracy. Current open-set TTA (OSTTA) methods rely on hard thresholds for separation and entropy minimization for adaptation. These strategies are brittle, often misclassifying ambiguous csOOD samples and inducing overconfident predictions, and their parameter-update mechanism is computationally prohibitive for VLMs. To address these limitations, we propose Prototype-based Double-Check Separation (ProtoDCS), a robust framework for OSTTA that effectively separates csID and csOOD samples, enabling safe and efficient adaptation of VLMs to csID data. Our main contributions are: (1) a novel double-check separation mechanism employing probabilistic Gaussian Mixture Model (GMM) verification to replace brittle thresholding; and (2) an evidence-driven adaptation strategy utilizing uncertainty-aware loss and efficient prototype-level updates, mitigating overconfidence and reducing computational overhead. Extensive experiments on CIFAR-10/100-C and Tiny-ImageNet-C demonstrate that ProtoDCS achieves state-of-the-art performance, significantly boosting both known-class accuracy and OOD detection metrics. Code will be available at https://github.com/O-YangF/ProtoDCS.
Precedent-Informed Reasoning: Mitigating Overthinking in Large Reasoning Models via Test-Time Precedent Learning
Feb 16, 2026Reasoning in Large Language Models (LLMs) often suffers from inefficient long chain-of-thought traces with redundant self-exploration and validation, which inflate computational costs and even degrade performance. Inspired by human reasoning patterns where people solve new problems by leveraging past related cases to constrain search spaces and reduce trial-and-error, we propose Precedent Informed Reasoning (PIR) transforming LRMs'reasoning paradigm from exhaustive self-exploration to guided learning from precedents. PIR addresses two key challenges: what precedents to adopt and how to utilize them. First, Adaptive Precedent Selection (APS) constructs, for each question and LRM, a compact set of precedents that are both semantically related and informative for the model. It ranks examples by a joint score with semantic similarity and model perplexity, then adapts the amount of precedents to maximize perplexity reduction. Second, Test-time Experience Internalization (TEI) is treated as the test-time learning on precedent-informed instruction, updating lightweight adapters to internalize solution patterns and use them as a prior during subsequent reasoning. Experiments across mathematical reasoning, scientific QA, and code generation demonstrate that PIR consistently shortens reasoning traces while maintaining or improving final accuracy across LLMs, yielding outstanding accuracy-efficiency trade-offs.
Beyond Model Scaling: Test-Time Intervention for Efficient Deep Reasoning
Jan 16, 2026Large Reasoning Models (LRMs) excel at multi-step reasoning but often suffer from inefficient reasoning processes like overthinking and overshoot, where excessive or misdirected reasoning increases computational cost and degrades performance. Existing efficient reasoning methods operate in a closed-loop manner, lacking mechanisms for external intervention to guide the reasoning process. To address this, we propose Think-with-Me, a novel test-time interactive reasoning paradigm that introduces external feedback intervention into the reasoning process. Our key insights are that transitional conjunctions serve as natural points for intervention, signaling phases of self-validation or exploration and using transitional words appropriately to prolong the reasoning enhances performance, while excessive use affects performance. Building on these insights, Think-with-Me pauses reasoning at these points for external feedback, adaptively extending or terminating reasoning to reduce redundancy while preserving accuracy. The feedback is generated via a multi-criteria evaluation (rationality and completeness) and comes from either human or LLM proxies. We train the target model using Group Relative Policy Optimization (GRPO) to adapt to this interactive mode. Experiments show that Think-with-Me achieves a superior balance between accuracy and reasoning length under limited context windows. On AIME24, Think-with-Me outperforms QwQ-32B by 7.19% in accuracy while reducing average reasoning length by 81% under an 8K window. The paradigm also benefits security and creative tasks.
Beyond Fast and Slow: Cognitive-Inspired Elastic Reasoning for Large Language Models
Dec 17, 2025Large language models (LLMs) have demonstrated impressive performance across various language tasks. However, existing LLM reasoning strategies mainly rely on the LLM itself with fast or slow mode (like o1 thinking) and thus struggle to balance reasoning efficiency and accuracy across queries of varying difficulties. In this paper, we propose Cognitive-Inspired Elastic Reasoning (CogER), a framework inspired by human hierarchical reasoning that dynamically selects the most suitable reasoning strategy for each query. Specifically, CogER first assesses the complexity of incoming queries and assigns them to one of several predefined levels, each corresponding to a tailored processing strategy, thereby addressing the challenge of unobservable query difficulty. To achieve automatic strategy selection, we model the process as a Markov Decision Process and train a CogER-Agent using reinforcement learning. The agent is guided by a reward function that balances solution quality and computational cost, ensuring resource-efficient reasoning. Moreover, for queries requiring external tools, we introduce Cognitive Tool-Assisted Reasoning, which enables the LLM to autonomously invoke external tools within its chain-of-thought. Extensive experiments demonstrate that CogER outperforms state-of-the-art Test-Time scaling methods, achieving at least a 13% relative improvement in average exact match on In-Domain tasks and an 8% relative gain on Out-of-Domain tasks.
Training-free Context-adaptive Attention for Efficient Long Context Modeling
Dec 10, 2025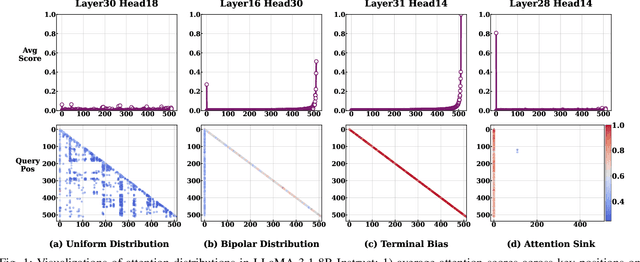
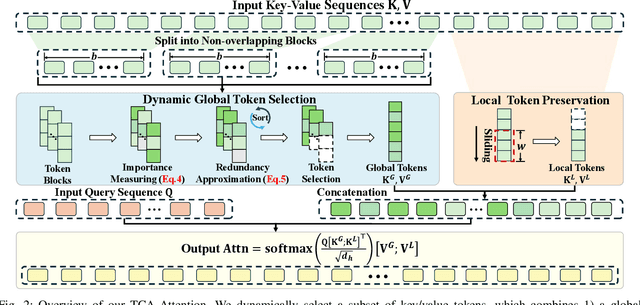
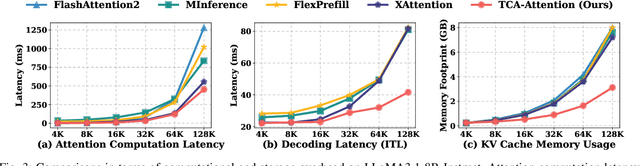
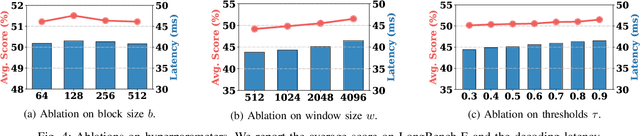
Large Language Models (LLMs) have demonstrated remarkable capabilities across a wide range of natural language processing tasks. These capabilities stem primarily from the self-attention mechanism, which enables modeling of long-range dependencies. However, the quadratic complexity of self-attention with respect to sequence length poses significant computational and memory challenges, especially as sequence length extends to extremes. While various sparse attention and KV cache compression methods have been proposed to improve efficiency, they often suffer from limitations such as reliance on fixed patterns, inability to handle both prefilling and decoding stages, or the requirement for additional training. In this paper, we propose Training-free Context-adaptive Attention (TCA-Attention), a training-free sparse attention mechanism that selectively attends to only the informative tokens for efficient long-context inference. Our method consists of two lightweight phases: i) an offline calibration phase that determines head-specific sparsity budgets via a single forward pass, and ii) an online token selection phase that adaptively retains core context tokens using a lightweight redundancy metric. TCA-Attention provides a unified solution that accelerates both prefilling and decoding while reducing KV cache memory footprint, without requiring parameter updates or architectural changes. Theoretical analysis shows that our approach maintains bounded approximation error. Extensive experiments demonstrate that TCA-Attention achieves a 2.8$\times$ speedup and reduces KV cache by 61% at 128K context length while maintaining performance comparable to full attention across various benchmarks, offering a practical plug-and-play solution for efficient long-context inference.
SUGAR: Learning Skeleton Representation with Visual-Motion Knowledge for Action Recognition
Nov 13, 2025Large Language Models (LLMs) hold rich implicit knowledge and powerful transferability. In this paper, we explore the combination of LLMs with the human skeleton to perform action classification and description. However, when treating LLM as a recognizer, two questions arise: 1) How can LLMs understand skeleton? 2) How can LLMs distinguish among actions? To address these problems, we introduce a novel paradigm named learning Skeleton representation with visUal-motion knowledGe for Action Recognition (SUGAR). In our pipeline, we first utilize off-the-shelf large-scale video models as a knowledge base to generate visual, motion information related to actions. Then, we propose to supervise skeleton learning through this prior knowledge to yield discrete representations. Finally, we use the LLM with untouched pre-training weights to understand these representations and generate the desired action targets and descriptions. Notably, we present a Temporal Query Projection (TQP) module to continuously model the skeleton signals with long sequences. Experiments on several skeleton-based action classification benchmarks demonstrate the efficacy of our SUGAR. Moreover, experiments on zero-shot scenarios show that SUGAR is more versatile than linear-based methods.
Continual Knowledge Adaptation for Reinforcement Learning
Oct 22, 2025

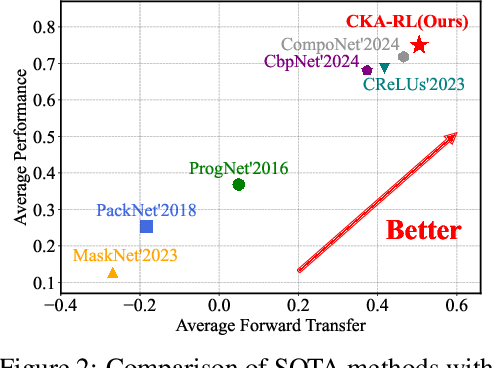
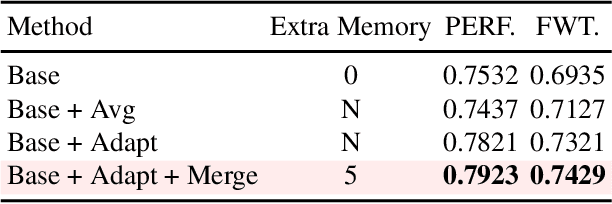
Reinforcement Learning enables agents to learn optimal behaviors through interactions with environments. However, real-world environments are typically non-stationary, requiring agents to continuously adapt to new tasks and changing conditions. Although Continual Reinforcement Learning facilitates learning across multiple tasks, existing methods often suffer from catastrophic forgetting and inefficient knowledge utilization. To address these challenges, we propose Continual Knowledge Adaptation for Reinforcement Learning (CKA-RL), which enables the accumulation and effective utilization of historical knowledge. Specifically, we introduce a Continual Knowledge Adaptation strategy, which involves maintaining a task-specific knowledge vector pool and dynamically using historical knowledge to adapt the agent to new tasks. This process mitigates catastrophic forgetting and enables efficient knowledge transfer across tasks by preserving and adapting critical model parameters. Additionally, we propose an Adaptive Knowledge Merging mechanism that combines similar knowledge vectors to address scalability challenges, reducing memory requirements while ensuring the retention of essential knowledge. Experiments on three benchmarks demonstrate that the proposed CKA-RL outperforms state-of-the-art methods, achieving an improvement of 4.20% in overall performance and 8.02% in forward transfer. The source code is available at https://github.com/Fhujinwu/CKA-RL.
Physics-Driven Spatiotemporal Modeling for AI-Generated Video Detection
Oct 09, 2025



AI-generated videos have achieved near-perfect visual realism (e.g., Sora), urgently necessitating reliable detection mechanisms. However, detecting such videos faces significant challenges in modeling high-dimensional spatiotemporal dynamics and identifying subtle anomalies that violate physical laws. In this paper, we propose a physics-driven AI-generated video detection paradigm based on probability flow conservation principles. Specifically, we propose a statistic called Normalized Spatiotemporal Gradient (NSG), which quantifies the ratio of spatial probability gradients to temporal density changes, explicitly capturing deviations from natural video dynamics. Leveraging pre-trained diffusion models, we develop an NSG estimator through spatial gradients approximation and motion-aware temporal modeling without complex motion decomposition while preserving physical constraints. Building on this, we propose an NSG-based video detection method (NSG-VD) that computes the Maximum Mean Discrepancy (MMD) between NSG features of the test and real videos as a detection metric. Last, we derive an upper bound of NSG feature distances between real and generated videos, proving that generated videos exhibit amplified discrepancies due to distributional shifts. Extensive experiments confirm that NSG-VD outperforms state-of-the-art baselines by 16.00% in Recall and 10.75% in F1-Score, validating the superior performance of NSG-VD. The source code is available at https://github.com/ZSHsh98/NSG-VD.
Adapt in the Wild: Test-Time Entropy Minimization with Sharpness and Feature Regularization
Sep 05, 2025Test-time adaptation (TTA) may fail to improve or even harm the model performance when test data have: 1) mixed distribution shifts, 2) small batch sizes, 3) online imbalanced label distribution shifts. This is often a key obstacle preventing existing TTA methods from being deployed in the real world. In this paper, we investigate the unstable reasons and find that the batch norm layer is a crucial factor hindering TTA stability. Conversely, TTA can perform more stably with batch-agnostic norm layers, i.e., group or layer norm. However, we observe that TTA with group and layer norms does not always succeed and still suffers many failure cases, i.e., the model collapses into trivial solutions by assigning the same class label for all samples. By digging into this, we find that, during the collapse process: 1) the model gradients often undergo an initial explosion followed by rapid degradation, suggesting that certain noisy test samples with large gradients may disrupt adaptation; and 2) the model representations tend to exhibit high correlations and classification bias. To address this, we first propose a sharpness-aware and reliable entropy minimization method, called SAR, for stabilizing TTA from two aspects: 1) remove partial noisy samples with large gradients, 2) encourage model weights to go to a flat minimum so that the model is robust to the remaining noisy samples. Based on SAR, we further introduce SAR^2 to prevent representation collapse with two regularizers: 1) a redundancy regularizer to reduce inter-dimensional correlations among centroid-invariant features; and 2) an inequity regularizer to maximize the prediction entropy of a prototype centroid, thereby penalizing biased representations toward any specific class. Promising results demonstrate that our methods perform more stably over prior methods and are computationally efficient under the above wild test scenarios.
Frequency-Aware Autoregressive Modeling for Efficient High-Resolution Image Synthesis
Jul 28, 2025



Visual autoregressive modeling, based on the next-scale prediction paradigm, exhibits notable advantages in image quality and model scalability over traditional autoregressive and diffusion models. It generates images by progressively refining resolution across multiple stages. However, the computational overhead in high-resolution stages remains a critical challenge due to the substantial number of tokens involved. In this paper, we introduce SparseVAR, a plug-and-play acceleration framework for next-scale prediction that dynamically excludes low-frequency tokens during inference without requiring additional training. Our approach is motivated by the observation that tokens in low-frequency regions have a negligible impact on image quality in high-resolution stages and exhibit strong similarity with neighboring tokens. Additionally, we observe that different blocks in the next-scale prediction model focus on distinct regions, with some concentrating on high-frequency areas. SparseVAR leverages these insights by employing lightweight MSE-based metrics to identify low-frequency tokens while preserving the fidelity of excluded regions through a small set of uniformly sampled anchor tokens. By significantly reducing the computational cost while maintaining high image generation quality, SparseVAR achieves notable acceleration in both HART and Infinity. Specifically, SparseVAR achieves up to a 2 times speedup with minimal quality degradation in Infinity-2B.