 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMTC-VAE: Multi-Level Temporal Compression with Content Awareness
Feb 01, 2026Latent Video Diffusion Models (LVDMs) rely on Variational Autoencoders (VAEs) to compress videos into compact latent representations. For continuous Variational Autoencoders (VAEs), achieving higher compression rates is desirable; yet, the efficiency notably declines when extra sampling layers are added without expanding the dimensions of hidden channels. In this paper, we present a technique to convert fixed compression rate VAEs into models that support multi-level temporal compression, providing a straightforward and minimal fine-tuning approach to counteract performance decline at elevated compression rates.Moreover, we examine how varying compression levels impact model performance over video segments with diverse characteristics, offering empirical evidence on the effectiveness of our proposed approach. We also investigate the integration of our multi-level temporal compression VAE with diffusion-based generative models, DiT, highlighting successful concurrent training and compatibility within these frameworks. This investigation illustrates the potential uses of multi-level temporal compression.
3DFlowAction: Learning Cross-Embodiment Manipulation from 3D Flow World Model
Jun 06, 2025Manipulation has long been a challenging task for robots, while humans can effortlessly perform complex interactions with objects, such as hanging a cup on the mug rack. A key reason is the lack of a large and uniform dataset for teaching robots manipulation skills. Current robot datasets often record robot action in different action spaces within a simple scene. This hinders the robot to learn a unified and robust action representation for different robots within diverse scenes. Observing how humans understand a manipulation task, we find that understanding how the objects should move in the 3D space is a critical clue for guiding actions. This clue is embodiment-agnostic and suitable for both humans and different robots. Motivated by this, we aim to learn a 3D flow world model from both human and robot manipulation data. This model predicts the future movement of the interacting objects in 3D space, guiding action planning for manipulation. Specifically, we synthesize a large-scale 3D optical flow dataset, named ManiFlow-110k, through a moving object auto-detect pipeline. A video diffusion-based world model then learns manipulation physics from these data, generating 3D optical flow trajectories conditioned on language instructions. With the generated 3D object optical flow, we propose a flow-guided rendering mechanism, which renders the predicted final state and leverages GPT-4o to assess whether the predicted flow aligns with the task description. This equips the robot with a closed-loop planning ability. Finally, we consider the predicted 3D optical flow as constraints for an optimization policy to determine a chunk of robot actions for manipulation. Extensive experiments demonstrate strong generalization across diverse robotic manipulation tasks and reliable cross-embodiment adaptation without hardware-specific training.
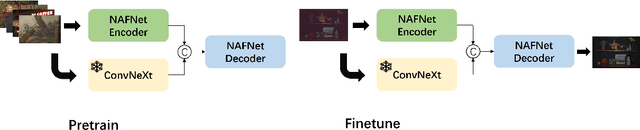
The Tenth NTIRE 2025 Image Denoising Challenge Report
Apr 16, 2025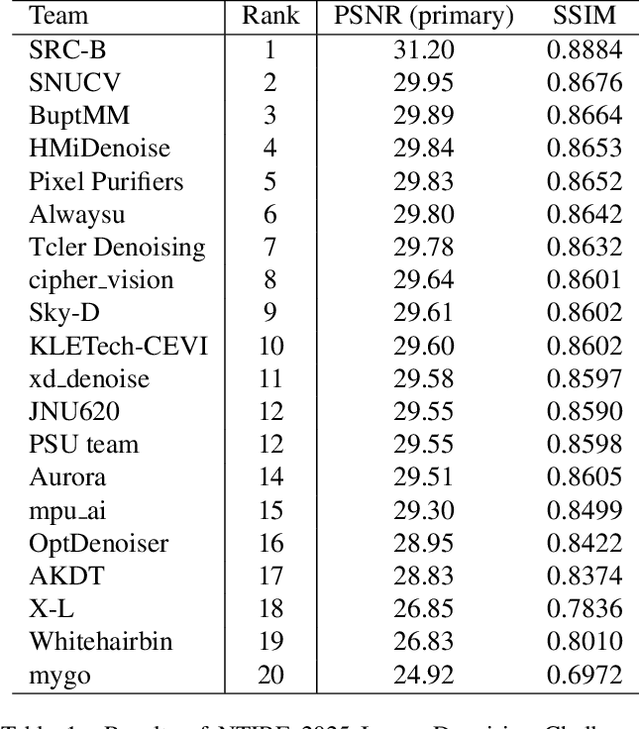


This paper presents an overview of the NTIRE 2025 Image Denoising Challenge ({\sigma} = 50), highlighting the proposed methodologies and corresponding results. The primary objective is to develop a network architecture capable of achieving high-quality denoising performance, quantitatively evaluated using PSNR, without constraints on computational complexity or model size. The task assumes independent additive white Gaussian noise (AWGN) with a fixed noise level of 50. A total of 290 participants registered for the challenge, with 20 teams successfully submitting valid results, providing insights into the current state-of-the-art in image denoising.
MIPI 2024 Challenge on Few-shot RAW Image Denoising: Methods and Results
Jun 11, 2024

The increasing demand for computational photography and imaging on mobile platforms has led to the widespread development and integration of advanced image sensors with novel algorithms in camera systems. However, the scarcity of high-quality data for research and the rare opportunity for in-depth exchange of views from industry and academia constrain the development of mobile intelligent photography and imaging (MIPI). Building on the achievements of the previous MIPI Workshops held at ECCV 2022 and CVPR 2023, we introduce our third MIPI challenge including three tracks focusing on novel image sensors and imaging algorithms. In this paper, we summarize and review the Few-shot RAW Image Denoising track on MIPI 2024. In total, 165 participants were successfully registered, and 7 teams submitted results in the final testing phase. The developed solutions in this challenge achieved state-of-the-art erformance on Few-shot RAW Image Denoising. More details of this challenge and the link to the dataset can be found at https://mipichallenge.org/MIPI2024.
VillagerAgent: A Graph-Based Multi-Agent Framework for Coordinating Complex Task Dependencies in Minecraft
Jun 09, 2024In this paper, we aim to evaluate multi-agent systems against complex dependencies, including spatial, causal, and temporal constraints. First, we construct a new benchmark, named VillagerBench, within the Minecraft environment.VillagerBench comprises diverse tasks crafted to test various aspects of multi-agent collaboration, from workload distribution to dynamic adaptation and synchronized task execution. Second, we introduce a Directed Acyclic Graph Multi-Agent Framework VillagerAgent to resolve complex inter-agent dependencies and enhance collaborative efficiency. This solution incorporates a task decomposer that creates a directed acyclic graph (DAG) for structured task management, an agent controller for task distribution, and a state manager for tracking environmental and agent data. Our empirical evaluation on VillagerBench demonstrates that VillagerAgent outperforms the existing AgentVerse model, reducing hallucinations and improving task decomposition efficacy. The results underscore VillagerAgent's potential in advancing multi-agent collaboration, offering a scalable and generalizable solution in dynamic environments. The source code is open-source on GitHub (https://github.com/cnsdqd-dyb/VillagerAgent).
Degradation Estimation Recurrent Neural Network with Local and Non-Local Priors for Compressive Spectral Imaging
Nov 15, 2023



In coded aperture snapshot spectral imaging (CASSI) systems, a core problem is to recover the 3D hyperspectral image (HSI) from the 2D measurement. Current deep unfolding networks (DUNs) for the HSI reconstruction mainly suffered from three issues. Firstly, in previous DUNs, the DNNs across different stages were unable to share the feature representations learned from different stages, leading to parameter sparsity, which in turn limited their reconstruction potential. Secondly, previous DUNs fail to estimate degradation-related parameters within a unified framework, including the degradation matrix in the data subproblem and the noise level in the prior subproblem. Consequently, either the accuracy of solving the data or the prior subproblem is compromised. Thirdly, exploiting both local and non-local priors for the HSI reconstruction is crucial, and it remains a key issue to be addressed. In this paper, we first transform the DUN into a Recurrent Neural Network (RNN) by sharing parameters across stages, which allows the DNN in each stage could learn feature representation from different stages, enhancing the representativeness of the DUN. Secondly, we incorporate the Degradation Estimation Network into the RNN (DERNN), which simultaneously estimates the degradation matrix and the noise level by residual learning with reference to the sensing matrix. Thirdly, we propose a Local and Non-Local Transformer (LNLT) to effectively exploit both local and non-local priors in HSIs. By integrating the LNLT into the DERNN for solving the prior subproblem, we propose the DERNN-LNLT, which achieves state-of-the-art performance.
Residual Degradation Learning Unfolding Framework with Mixing Priors across Spectral and Spatial for Compressive Spectral Imaging
Nov 13, 2022



To acquire a snapshot spectral image, coded aperture snapshot spectral imaging (CASSI) is proposed. A core problem of the CASSI system is to recover the reliable and fine underlying 3D spectral cube from the 2D measurement. By alternately solving a data subproblem and a prior subproblem, deep unfolding methods achieve good performance. However, in the data subproblem, the used sensing matrix is ill-suited for the real degradation process due to the device errors caused by phase aberration, distortion; in the prior subproblem, it is important to design a suitable model to jointly exploit both spatial and spectral priors. In this paper, we propose a Residual Degradation Learning Unfolding Framework (RDLUF), which bridges the gap between the sensing matrix and the degradation process. Moreover, a Mix$S^2$ Transformer is designed via mixing priors across spectral and spatial to strengthen the spectral-spatial representation capability. Finally, plugging the Mix$S^2$ Transformer into the RDLUF leads to an end-to-end trainable and interpretable neural network RDLUF-Mix$S^2$. Experimental results establish the superior performance of the proposed method over existing ones.