 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Efficient 3D Object Detection for Vehicle-Infrastructure Collaboration via Risk-Intent Selection
Jan 06, 2026Vehicle-Infrastructure Collaborative Perception (VICP) is pivotal for resolving occlusion in autonomous driving, yet the trade-off between communication bandwidth and feature redundancy remains a critical bottleneck. While intermediate fusion mitigates data volume compared to raw sharing, existing frameworks typically rely on spatial compression or static confidence maps, which inefficiently transmit spatially redundant features from non-critical background regions. To address this, we propose Risk-intent Selective detection (RiSe), an interaction-aware framework that shifts the paradigm from identifying visible regions to prioritizing risk-critical ones. Specifically, we introduce a Potential Field-Trajectory Correlation Model (PTCM) grounded in potential field theory to quantitatively assess kinematic risks. Complementing this, an Intention-Driven Area Prediction Module (IDAPM) leverages ego-motion priors to proactively predict and filter key Bird's-Eye-View (BEV) areas essential for decision-making. By integrating these components, RiSe implements a semantic-selective fusion scheme that transmits high-fidelity features only from high-interaction regions, effectively acting as a feature denoiser. Extensive experiments on the DeepAccident dataset demonstrate that our method reduces communication volume to 0.71\% of full feature sharing while maintaining state-of-the-art detection accuracy, establishing a competitive Pareto frontier between bandwidth efficiency and perception performance.
SafeDrive: Knowledge- and Data-Driven Risk-Sensitive Decision-Making for Autonomous Vehicles with Large Language Models
Dec 19, 2024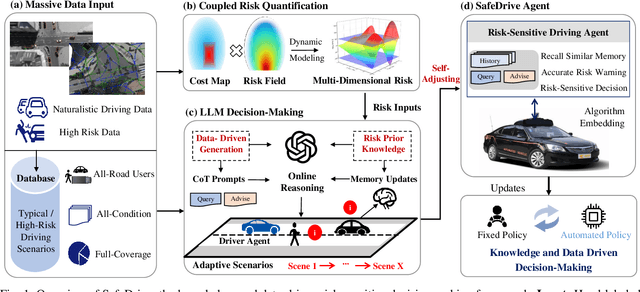
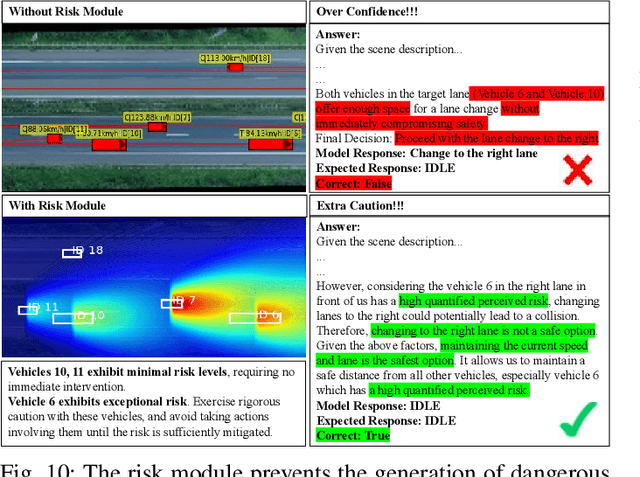
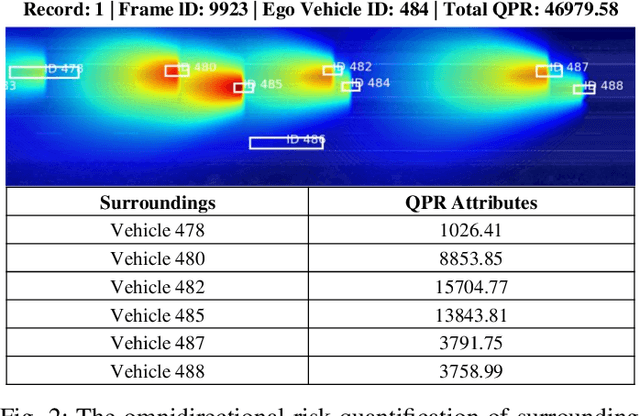
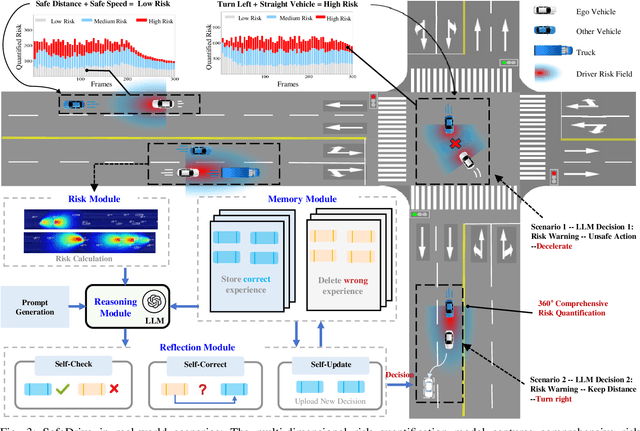
Recent advancements in autonomous vehicles (AVs) use Large Language Models (LLMs) to perform well in normal driving scenarios. However, ensuring safety in dynamic, high-risk environments and managing safety-critical long-tail events remain significant challenges. To address these issues, we propose SafeDrive, a knowledge- and data-driven risk-sensitive decision-making framework to enhance AV safety and adaptability. The proposed framework introduces a modular system comprising: (1) a Risk Module for quantifying multi-factor coupled risks involving driver, vehicle, and road interactions; (2) a Memory Module for storing and retrieving typical scenarios to improve adaptability; (3) a LLM-powered Reasoning Module for context-aware safety decision-making; and (4) a Reflection Module for refining decisions through iterative learning. By integrating knowledge-driven insights with adaptive learning mechanisms, the framework ensures robust decision-making under uncertain conditions. Extensive evaluations on real-world traffic datasets, including highways (HighD), intersections (InD), and roundabouts (RounD), validate the framework's ability to enhance decision-making safety (achieving a 100% safety rate), replicate human-like driving behaviors (with decision alignment exceeding 85%), and adapt effectively to unpredictable scenarios. SafeDrive establishes a novel paradigm for integrating knowledge- and data-driven methods, highlighting significant potential to improve safety and adaptability of autonomous driving in high-risk traffic scenarios. Project Page: https://mezzi33.github.io/SafeDrive/
DECODE: Domain-aware Continual Domain Expansion for Motion Prediction
Nov 26, 2024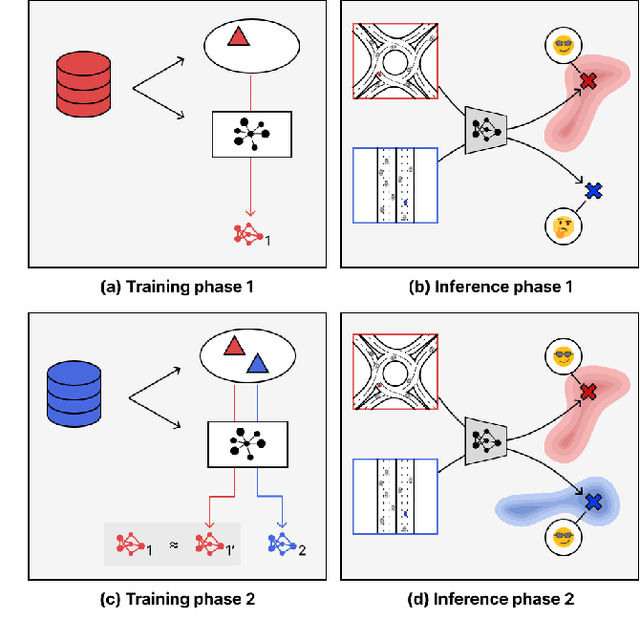
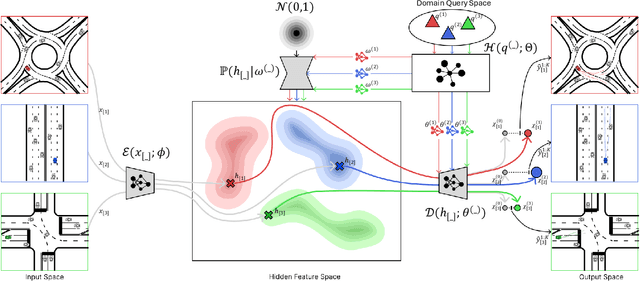
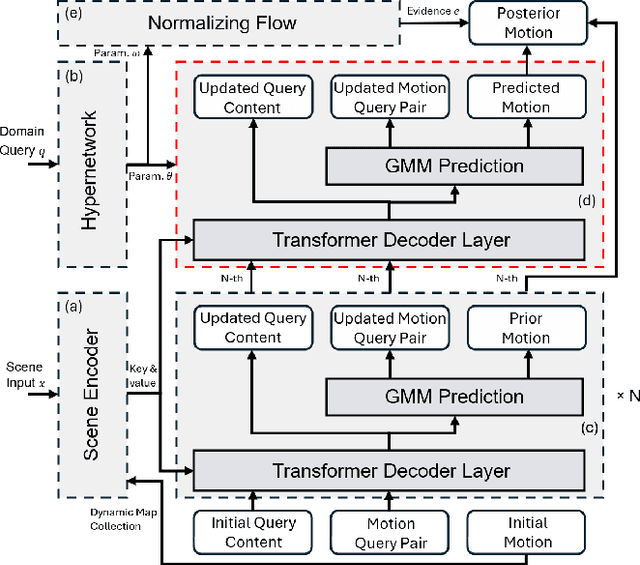
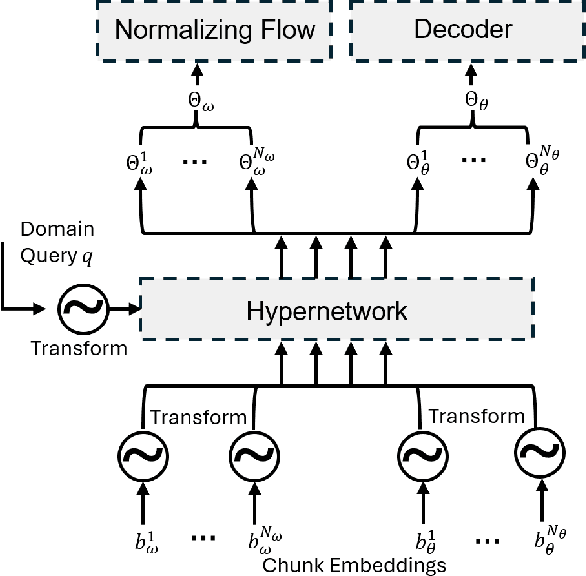
Motion prediction is critical for autonomous vehicles to effectively navigate complex environments and accurately anticipate the behaviors of other traffic participants. As autonomous driving continues to evolve, the need to assimilate new and varied driving scenarios necessitates frequent model updates through retraining. To address these demands, we introduce DECODE, a novel continual learning framework that begins with a pre-trained generalized model and incrementally develops specialized models for distinct domains. Unlike existing continual learning approaches that attempt to develop a unified model capable of generalizing across diverse scenarios, DECODE uniquely balances specialization with generalization, dynamically adjusting to real-time demands. The proposed framework leverages a hypernetwork to generate model parameters, significantly reducing storage requirements, and incorporates a normalizing flow mechanism for real-time model selection based on likelihood estimation. Furthermore, DECODE merges outputs from the most relevant specialized and generalized models using deep Bayesian uncertainty estimation techniques. This integration ensures optimal performance in familiar conditions while maintaining robustness in unfamiliar scenarios. Extensive evaluations confirm the effectiveness of the framework, achieving a notably low forgetting rate of 0.044 and an average minADE of 0.584 m, significantly surpassing traditional learning strategies and demonstrating adaptability across a wide range of driving conditions.
WAT: Improve the Worst-class Robustness in Adversarial Training
Feb 08, 2023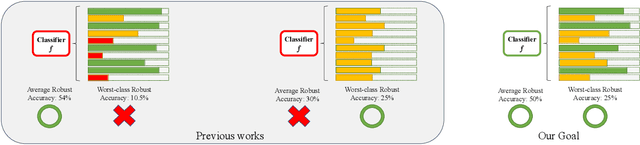
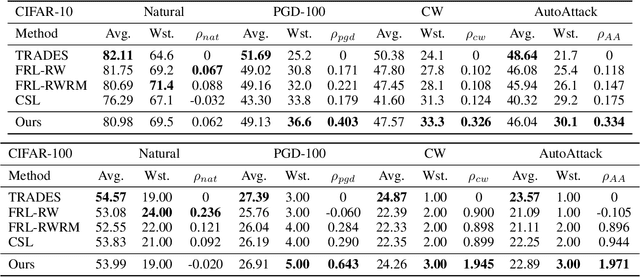
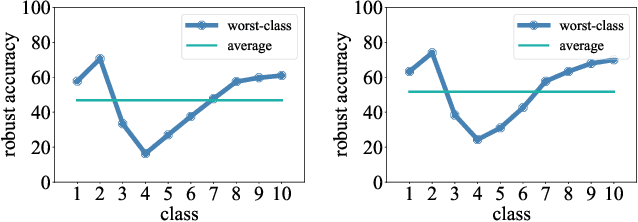
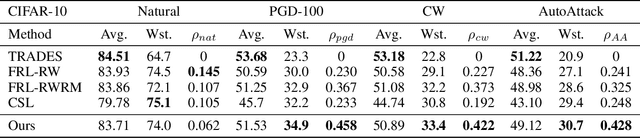
Deep Neural Networks (DNN) have been shown to be vulnerable to adversarial examples. Adversarial training (AT) is a popular and effective strategy to defend against adversarial attacks. Recent works (Benz et al., 2020; Xu et al., 2021; Tian et al., 2021) have shown that a robust model well-trained by AT exhibits a remarkable robustness disparity among classes, and propose various methods to obtain consistent robust accuracy across classes. Unfortunately, these methods sacrifice a good deal of the average robust accuracy. Accordingly, this paper proposes a novel framework of worst-class adversarial training and leverages no-regret dynamics to solve this problem. Our goal is to obtain a classifier with great performance on worst-class and sacrifice just a little average robust accuracy at the same time. We then rigorously analyze the theoretical properties of our proposed algorithm, and the generalization error bound in terms of the worst-class robust risk. Furthermore, we propose a measurement to evaluate the proposed method in terms of both the average and worst-class accuracies. Experiments on various datasets and networks show that our proposed method outperforms the state-of-the-art approaches.
Planning Automated Driving with Accident Experience Referencing and Common-sense Inferencing
Jan 26, 2023Although a typical autopilot system far surpasses humans in term of sensing accuracy, performance stability and response agility, such a system is still far behind humans in the wisdom of understanding an unfamiliar environment with creativity, adaptivity and resiliency. Current AD brains are basically expert systems featuring logical computations, which resemble the thinking flow of a left brain working at tactical level. A right brain is needed to upgrade the safety of automated driving vehicle onto next generation by making intuitive strategical judgements that can supervise the tactical action planning. In this work, we present the concept of an Automated Driving Strategical Brain (ADSB): a framework of a scene perception and scene safety evaluation system that works at a higher abstraction level, incorporating experience referencing, common-sense inferring and goal-and-value judging capabilities, to provide a contextual perspective for decision making within automated driving planning. The ADSB brain architecture is made up of the Experience Referencing Engine (ERE), the Common-sense Referencing Engine (CIE) and the Goal and Value Keeper (GVK). 1,614,748 cases from FARS/CRSS database of NHTSA in the period 1975 to 2018 are used for the training of ERE model. The kernel of CIE is a trained model, COMET-BART by ATOMIC, which can be used to provide directional advice when tactical-level environmental perception conclusions are ambiguous; it can also use future scenario models to remind tactical-level decision systems to plan ahead of a perceived hazard scene. GVK can take in any additional expert-hand-written rules that are of qualitative nature. Moreover, we believe that with good scalability, the ADSB approach provides a potential solution to the problem of long-tail corner cases encountered in the validation of a rule-based planning algorithm.
SOTIF Entropy: Online SOTIF Risk Quantification and Mitigation for Autonomous Driving
Nov 08, 2022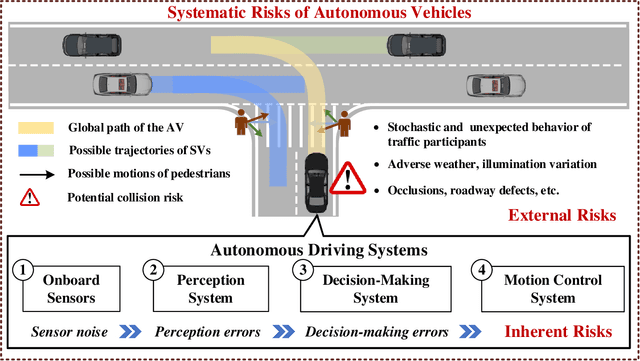

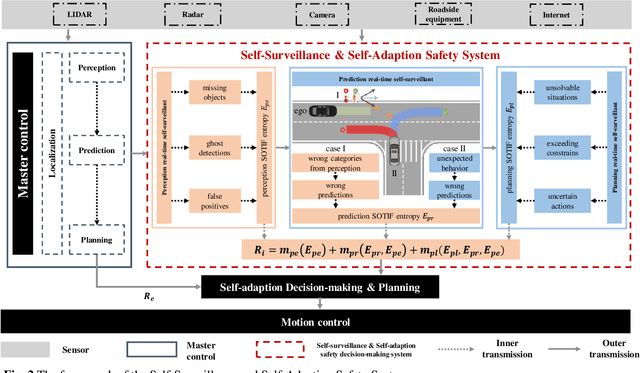
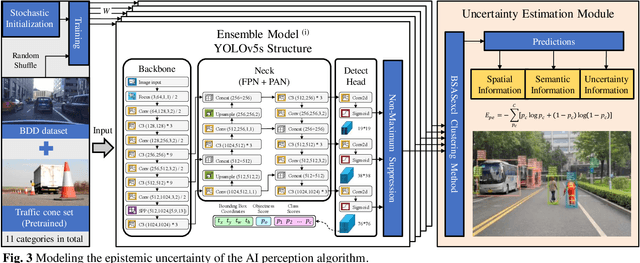
Autonomous driving confronts great challenges in complex traffic scenarios, where the risk of Safety of the Intended Functionality (SOTIF) can be triggered by the dynamic operational environment and system insufficiencies. The SOTIF risk is reflected not only intuitively in the collision risk with objects outside the autonomous vehicles (AVs), but also inherently in the performance limitation risk of the implemented algorithms themselves. How to minimize the SOTIF risk for autonomous driving is currently a critical, difficult, and unresolved issue. Therefore, this paper proposes the "Self-Surveillance and Self-Adaption System" as a systematic approach to online minimize the SOTIF risk, which aims to provide a systematic solution for monitoring, quantification, and mitigation of inherent and external risks. The core of this system is the risk monitoring of the implemented artificial intelligence algorithms within the AV. As a demonstration of the Self-Surveillance and Self-Adaption System, the risk monitoring of the perception algorithm, i.e., YOLOv5 is highlighted. Moreover, the inherent perception algorithm risk and external collision risk are jointly quantified via SOTIF entropy, which is then propagated downstream to the decision-making module and mitigated. Finally, several challenging scenarios are demonstrated, and the Hardware-in-the-Loop experiments are conducted to verify the efficiency and effectiveness of the system. The results demonstrate that the Self-Surveillance and Self-Adaption System enables dependable online monitoring, quantification, and mitigation of SOTIF risk in real-time critical traffic environments.
Eco-Mobility-on-Demand Fleet Control with Ride-Sharing
Aug 23, 2019


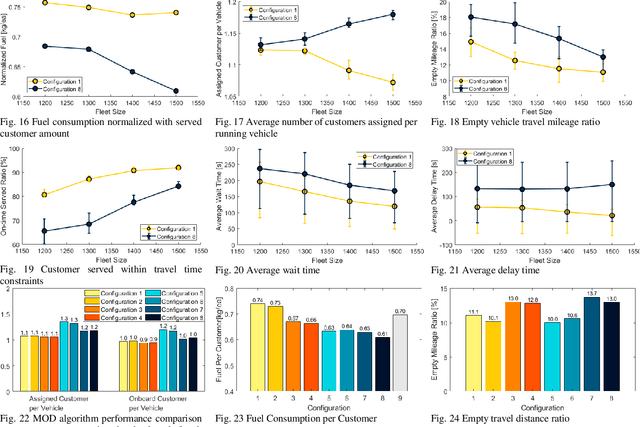
Shared Mobility-on-Demand using automated vehicles can reduce energy consumption and cost for future mobility. However, its full potential in energy saving has not been fully explored. An algorithm to minimize fleet fuel consumption while satisfying customers travel time constraints is developed in this paper. Numerical simulations with realistic travel demand and route choice are performed, showing that if fuel consumption is not considered, the MOD service can increase fleet fuel consumption due to increased empty vehicle mileage. With fuel consumption as part of the cost function, we can reduce total fuel consumption by 12 percent while maintaining a high level of mobility service.