 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEco-Mobility-on-Demand Fleet Control with Ride-Sharing
Aug 23, 2019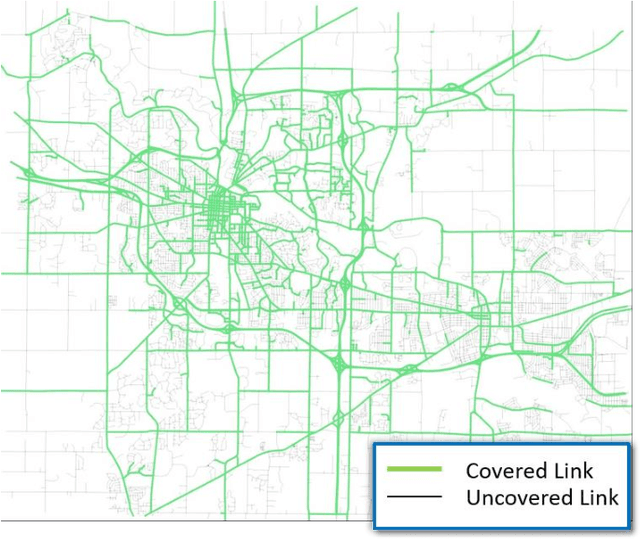


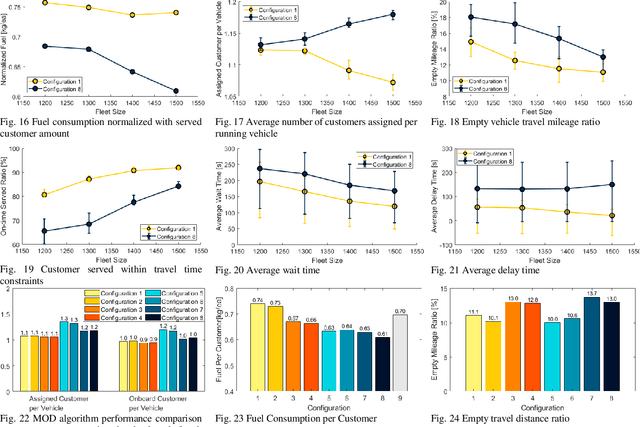
Shared Mobility-on-Demand using automated vehicles can reduce energy consumption and cost for future mobility. However, its full potential in energy saving has not been fully explored. An algorithm to minimize fleet fuel consumption while satisfying customers travel time constraints is developed in this paper. Numerical simulations with realistic travel demand and route choice are performed, showing that if fuel consumption is not considered, the MOD service can increase fleet fuel consumption due to increased empty vehicle mileage. With fuel consumption as part of the cost function, we can reduce total fuel consumption by 12 percent while maintaining a high level of mobility service.
Developing Robot Driver Etiquette Based on Naturalistic Human Driving Behavior
Aug 01, 2018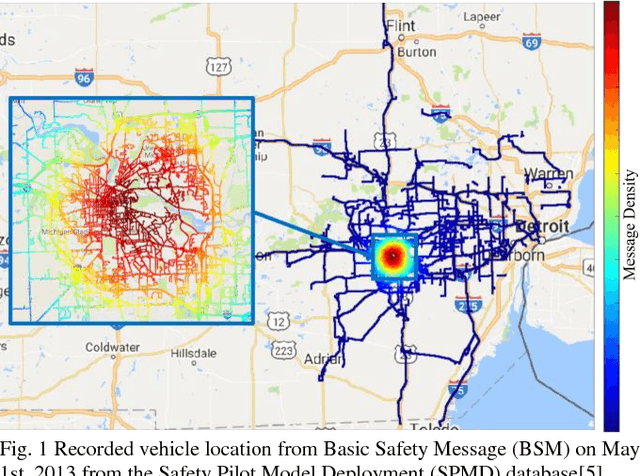

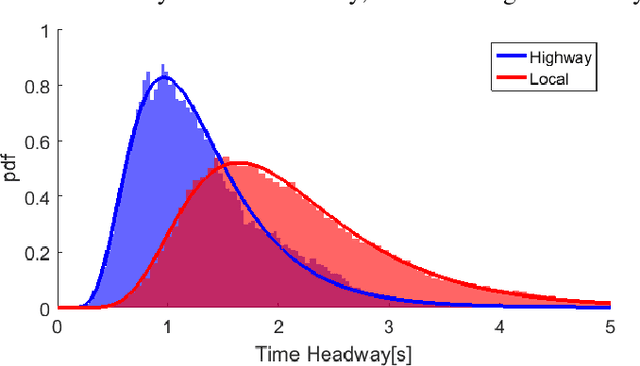
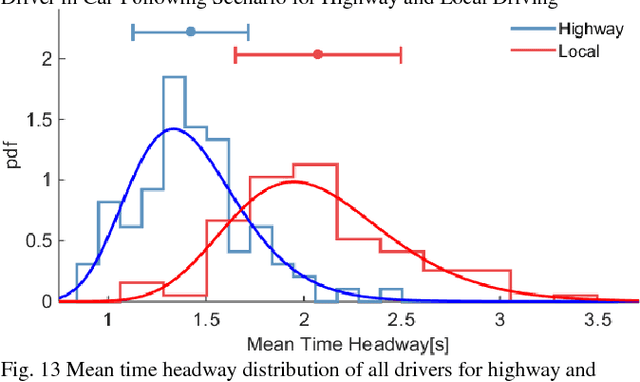
Automated vehicles can change the society by improved safety, mobility and fuel efficiency. However, due to the higher cost and change in business model, over the coming decades, the highly automated vehicles likely will continue to interact with many human-driven vehicles. In the past, the control/design of the highly automated (robotic) vehicles mainly considers safety and efficiency but failed to address the "driving culture" of surrounding human-driven vehicles. Thus, the robotic vehicles may demonstrate behaviors very different from other vehicles. We study this "driving etiquette" problem in this paper. As the first step, we report the key behavior parameters of human driven vehicles derived from a large naturalistic driving database. The results can be used to guide future algorithm design of highly automated vehicles or to develop realistic human-driven vehicle behavior model in simulations.