 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafeDrive: Knowledge- and Data-Driven Risk-Sensitive Decision-Making for Autonomous Vehicles with Large Language Models
Paper and Code
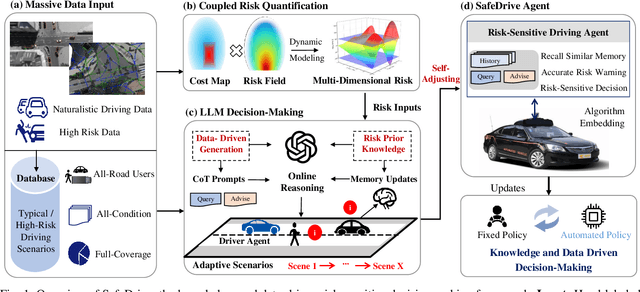
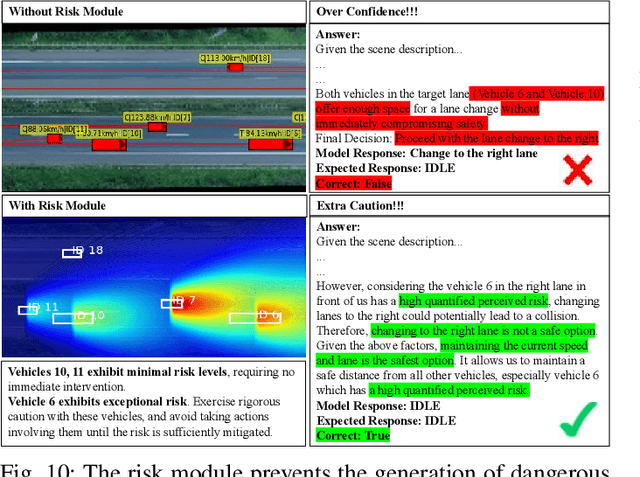
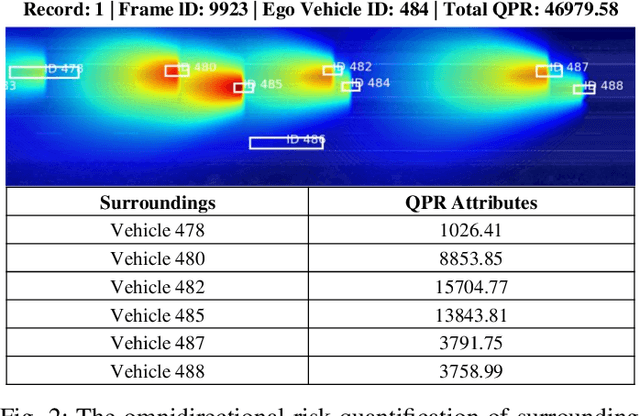
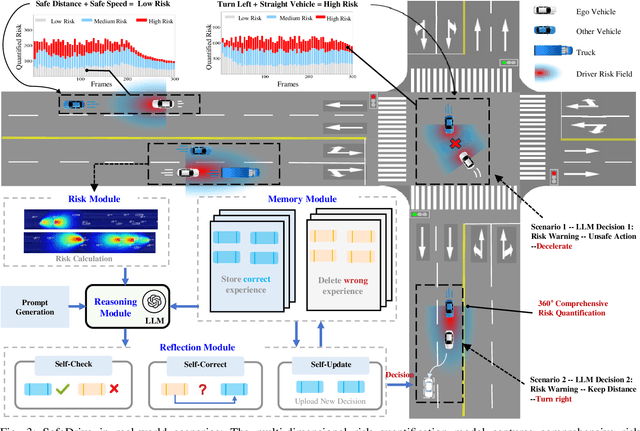
Recent advancements in autonomous vehicles (AVs) use Large Language Models (LLMs) to perform well in normal driving scenarios. However, ensuring safety in dynamic, high-risk environments and managing safety-critical long-tail events remain significant challenges. To address these issues, we propose SafeDrive, a knowledge- and data-driven risk-sensitive decision-making framework to enhance AV safety and adaptability. The proposed framework introduces a modular system comprising: (1) a Risk Module for quantifying multi-factor coupled risks involving driver, vehicle, and road interactions; (2) a Memory Module for storing and retrieving typical scenarios to improve adaptability; (3) a LLM-powered Reasoning Module for context-aware safety decision-making; and (4) a Reflection Module for refining decisions through iterative learning. By integrating knowledge-driven insights with adaptive learning mechanisms, the framework ensures robust decision-making under uncertain conditions. Extensive evaluations on real-world traffic datasets, including highways (HighD), intersections (InD), and roundabouts (RounD), validate the framework's ability to enhance decision-making safety (achieving a 100% safety rate), replicate human-like driving behaviors (with decision alignment exceeding 85%), and adapt effectively to unpredictable scenarios. SafeDrive establishes a novel paradigm for integrating knowledge- and data-driven methods, highlighting significant potential to improve safety and adaptability of autonomous driving in high-risk traffic scenarios. Project Page: https://mezzi33.github.io/SafeDrive/