 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMIND-Stack: Modular, Interpretable, End-to-End Differentiability for Autonomous Navigation
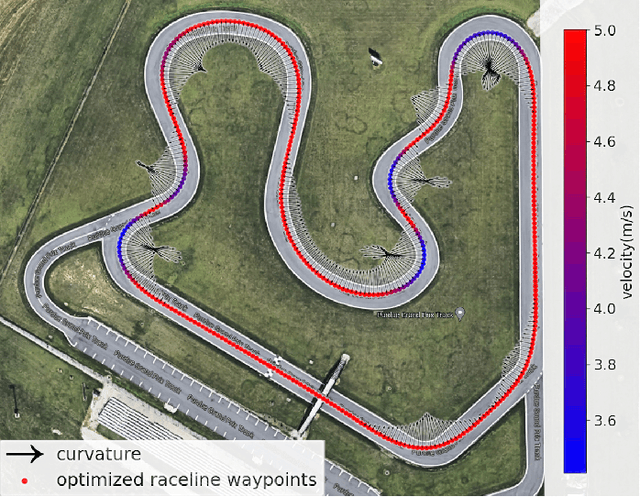
May 27, 2025Developing robust, efficient navigation algorithms is challenging. Rule-based methods offer interpretability and modularity but struggle with learning from large datasets, while end-to-end neural networks excel in learning but lack transparency and modularity. In this paper, we present MIND-Stack, a modular software stack consisting of a localization network and a Stanley Controller with intermediate human interpretable state representations and end-to-end differentiability. Our approach enables the upstream localization module to reduce the downstream control error, extending its role beyond state estimation. Unlike existing research on differentiable algorithms that either lack modules of the autonomous stack to span from sensor input to actuator output or real-world implementation, MIND-Stack offers both capabilities. We conduct experiments that demonstrate the ability of the localization module to reduce the downstream control loss through its end-to-end differentiability while offering better performance than state-of-the-art algorithms. We showcase sim-to-real capabilities by deploying the algorithm on a real-world embedded autonomous platform with limited computation power and demonstrate simultaneous training of both the localization and controller towards one goal. While MIND-Stack shows good results, we discuss the incorporation of additional modules from the autonomous navigation pipeline in the future, promising even greater stability and performance in the next iterations of the framework.
Small-Scale Testbeds for Connected and Automated Vehicles and Robot Swarms: Challenges and a Roadmap
Mar 07, 2025This article proposes a roadmap to address the current challenges in small-scale testbeds for Connected and Automated Vehicles (CAVs) and robot swarms. The roadmap is a joint effort of participants in the workshop "1st Workshop on Small-Scale Testbeds for Connected and Automated Vehicles and Robot Swarms," held on June 2 at the IEEE Intelligent Vehicles Symposium (IV) 2024 in Jeju, South Korea. The roadmap contains three parts: 1) enhancing accessibility and diversity, especially for underrepresented communities, 2) sharing best practices for the development and maintenance of testbeds, and 3) connecting testbeds through an abstraction layer to support collaboration. The workshop features eight invited speakers, four contributed papers [1]-[4], and a presentation of a survey paper on testbeds [5]. The survey paper provides an online comparative table of more than 25 testbeds, available at https://bassamlab.github.io/testbeds-survey. The workshop's own website is available at https://cpm-remote.lrt.unibwmuenchen.de/iv24-workshop.
AV4EV: Open-Source Modular Autonomous Electric Vehicle Platform to Make Mobility Research Accessible
Dec 01, 2023


When academic researchers develop and validate autonomous driving algorithms, there is a challenge in balancing high-performance capabilities with the cost and complexity of the vehicle platform. Much of today's research on autonomous vehicles (AV) is limited to experimentation on expensive commercial vehicles that require large teams with diverse skills to retrofit the vehicles and test them in dedicated testing facilities. Testing the limits of safety and performance on such vehicles is costly and hazardous. It is also outside the reach of most academic departments and research groups. On the other hand, scaled-down 1/10th-1/16th scale vehicle platforms are more affordable but have limited similitude in dynamics, control, and drivability. To address this issue, we present the design of a one-third-scale autonomous electric go-kart platform with open-source mechatronics design along with fully-functional autonomous driving software. The platform's multi-modal driving system is capable of manual, autonomous, and teleoperation driving modes. It also features a flexible sensing suite for development and deployment of algorithms across perception, localization, planning, and control. This development serves as a bridge between full-scale vehicles and reduced-scale cars while accelerating cost-effective algorithmic advancements in autonomous systems research. Our experimental results demonstrate the AV4EV platform's capabilities and ease-of-use for developing new AV algorithms. All materials are available at AV4EV.org to stimulate collaborative efforts within the AV and electric vehicle (EV) communities.