 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent VQA: Exploring Multi-Agent Foundation Models in Zero-Shot Visual Question Answering
Mar 21, 2024



This work explores the zero-shot capabilities of foundation models in Visual Question Answering (VQA) tasks. We propose an adaptive multi-agent system, named Multi-Agent VQA, to overcome the limitations of foundation models in object detection and counting by using specialized agents as tools. Unlike existing approaches, our study focuses on the system's performance without fine-tuning it on specific VQA datasets, making it more practical and robust in the open world. We present preliminary experimental results under zero-shot scenarios and highlight some failure cases, offering new directions for future research.
Bridging the Gap between Discrete Agent Strategies in Game Theory and Continuous Motion Planning in Dynamic Environments
Mar 17, 2024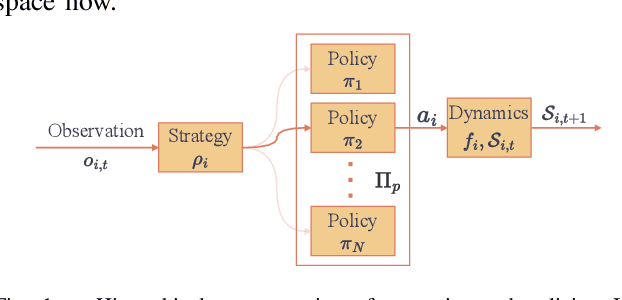
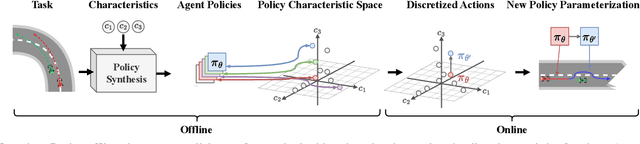


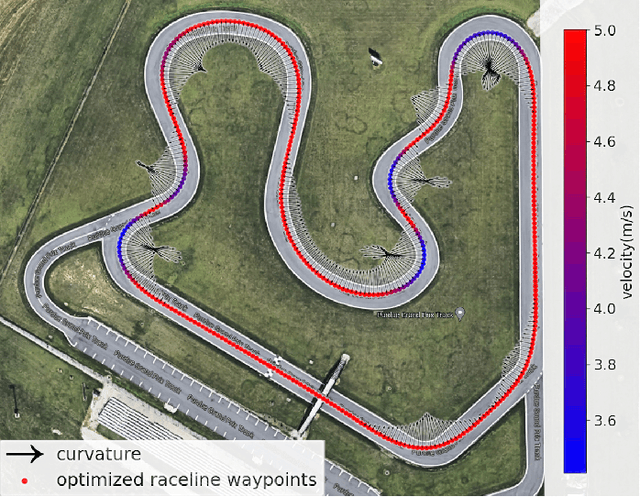
Generating competitive strategies and performing continuous motion planning simultaneously in an adversarial setting is a challenging problem. In addition, understanding the intent of other agents is crucial to deploying autonomous systems in adversarial multi-agent environments. Existing approaches either discretize agent action by grouping similar control inputs, sacrificing performance in motion planning, or plan in uninterpretable latent spaces, producing hard-to-understand agent behaviors. This paper proposes an agent strategy representation via Policy Characteristic Space that maps the agent policies to a pre-specified low-dimensional space. Policy Characteristic Space enables the discretization of agent policy switchings while preserving continuity in control. Also, it provides intepretability of agent policies and clear intentions of policy switchings. Then, regret-based game-theoretic approaches can be applied in the Policy Characteristic Space to obtain high performance in adversarial environments. Our proposed method is assessed by conducting experiments in an autonomous racing scenario using scaled vehicles. Statistical evidence shows that our method significantly improves the win rate of ego agent and the method also generalizes well to unseen environments.
AV4EV: Open-Source Modular Autonomous Electric Vehicle Platform to Make Mobility Research Accessible
Dec 01, 2023


When academic researchers develop and validate autonomous driving algorithms, there is a challenge in balancing high-performance capabilities with the cost and complexity of the vehicle platform. Much of today's research on autonomous vehicles (AV) is limited to experimentation on expensive commercial vehicles that require large teams with diverse skills to retrofit the vehicles and test them in dedicated testing facilities. Testing the limits of safety and performance on such vehicles is costly and hazardous. It is also outside the reach of most academic departments and research groups. On the other hand, scaled-down 1/10th-1/16th scale vehicle platforms are more affordable but have limited similitude in dynamics, control, and drivability. To address this issue, we present the design of a one-third-scale autonomous electric go-kart platform with open-source mechatronics design along with fully-functional autonomous driving software. The platform's multi-modal driving system is capable of manual, autonomous, and teleoperation driving modes. It also features a flexible sensing suite for development and deployment of algorithms across perception, localization, planning, and control. This development serves as a bridge between full-scale vehicles and reduced-scale cars while accelerating cost-effective algorithmic advancements in autonomous systems research. Our experimental results demonstrate the AV4EV platform's capabilities and ease-of-use for developing new AV algorithms. All materials are available at AV4EV.org to stimulate collaborative efforts within the AV and electric vehicle (EV) communities.
Enhancing Scene Graph Generation with Hierarchical Relationships and Commonsense Knowledge
Nov 21, 2023



This work presents an enhanced approach to generating scene graphs by incorporating a relationship hierarchy and commonsense knowledge. Specifically, we propose a Bayesian classification head that exploits an informative hierarchical structure. It jointly predicts the super-category or type of relationship between the two objects, along with the detailed relationship under each super-category. We design a commonsense validation pipeline that uses a large language model to critique the results from the scene graph prediction system and then use that feedback to enhance the model performance. The system requires no external large language model assistance at test time, making it more convenient for practical applications. Experiments on the Visual Genome and the OpenImage V6 datasets demonstrate that harnessing hierarchical relationships enhances the model performance by a large margin. The proposed Bayesian head can also be incorporated as a portable module in existing scene graph generation algorithms to improve their results. In addition, the commonsense validation enables the model to generate an extensive set of reasonable predictions beyond dataset annotations.
A Benchmark Comparison of Imitation Learning-based Control Policies for Autonomous Racing
Sep 29, 2022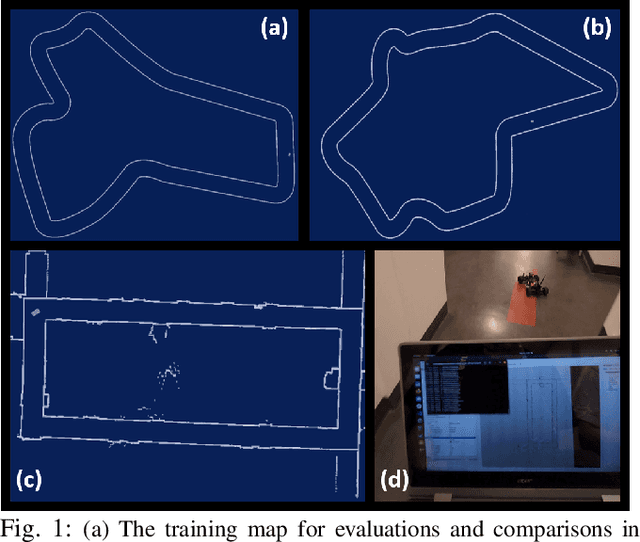
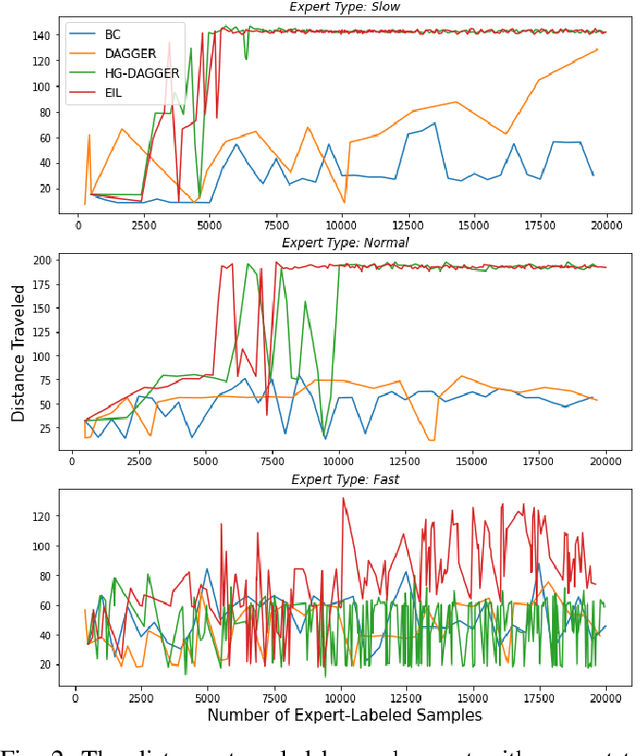
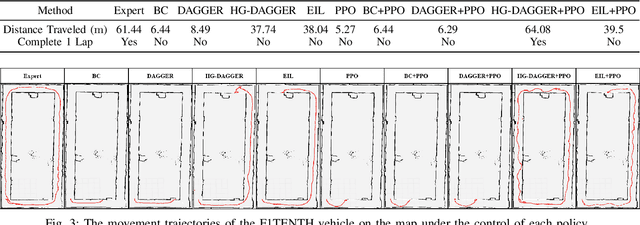
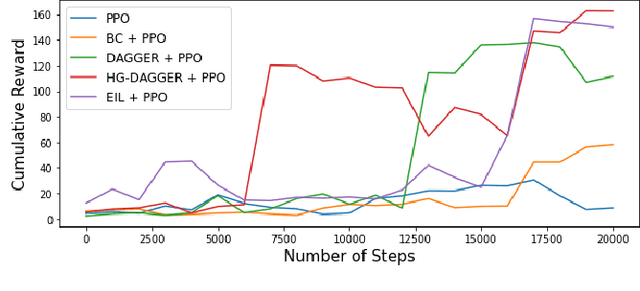
Autonomous racing with scaled race cars has gained increasing attention as an effective approach for developing perception, planning and control algorithms for safe autonomous driving at the limits of the vehicle's handling. To train agile control policies for autonomous racing, learning-based approaches largely utilize reinforcement learning, albeit with mixed results. In this study, we benchmark a variety of imitation learning policies for racing vehicles that are applied directly or for bootstrapping reinforcement learning both in simulation and on scaled real-world environments. We show that interactive imitation learning techniques outperform traditional imitation learning methods and can greatly improve the performance of reinforcement learning policies by bootstrapping thanks to its better sample efficiency. Our benchmarks provide a foundation for future research on autonomous racing using Imitation Learning and Reinforcement Learning.
Game-theoretic Objective Space Planning
Sep 16, 2022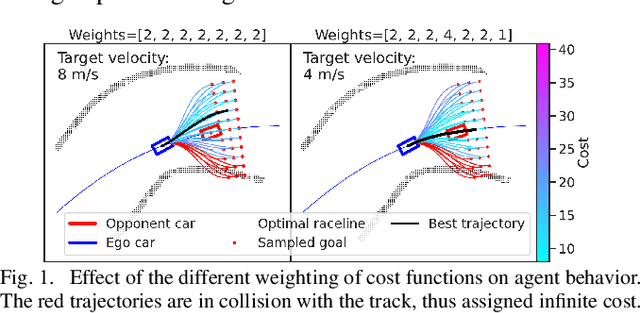
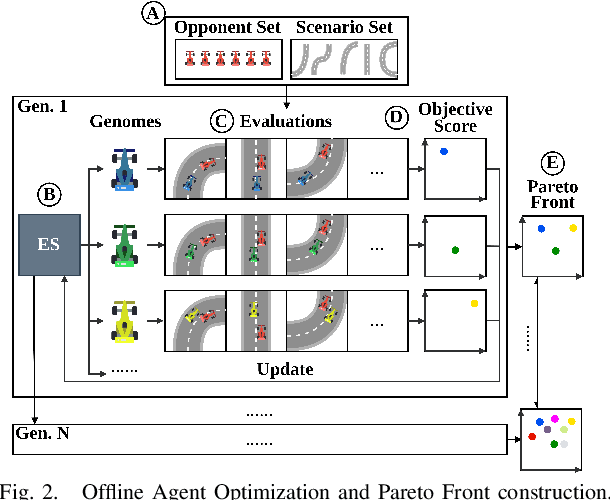
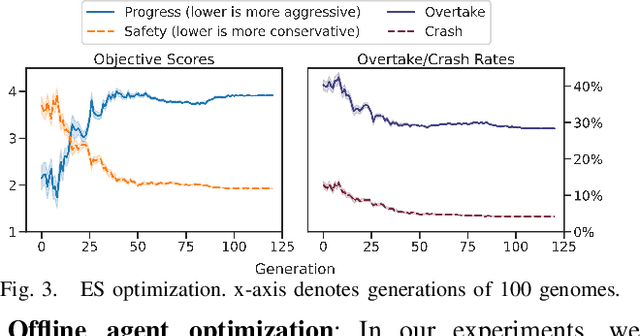
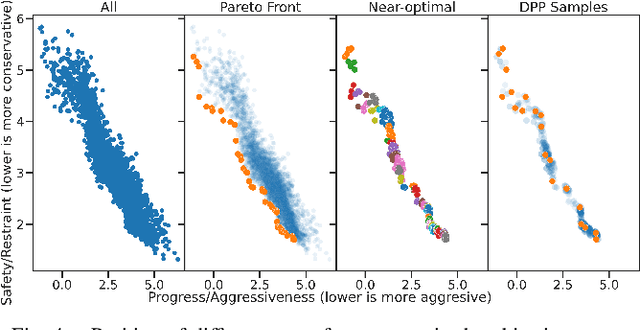
Autonomous Racing awards agents that react to opponents' behaviors with agile maneuvers towards progressing along the track while penalizing both over-aggressive and over-conservative agents. Understanding the intent of other agents is crucial to deploying autonomous systems in adversarial multi-agent environments. Current approaches either oversimplify the discretization of the action space of agents or fail to recognize the long-term effect of actions and become myopic. Our work focuses on addressing these two challenges. First, we propose a novel dimension reduction method that encapsulates diverse agent behaviors while conserving the continuity of agent actions. Second, we formulate the two-agent racing game as a regret minimization problem and provide a solution for tractable counterfactual regret minimization with a regret prediction model. Finally, we validate our findings experimentally on scaled autonomous vehicles. We demonstrate that using the proposed game-theoretic planner using agent characterization with the objective space significantly improves the win rate against different opponents, and the improvement is transferable to unseen opponents in an unseen environment.