 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBridging the Gap between Discrete Agent Strategies in Game Theory and Continuous Motion Planning in Dynamic Environments
Paper and Code
Mar 17, 2024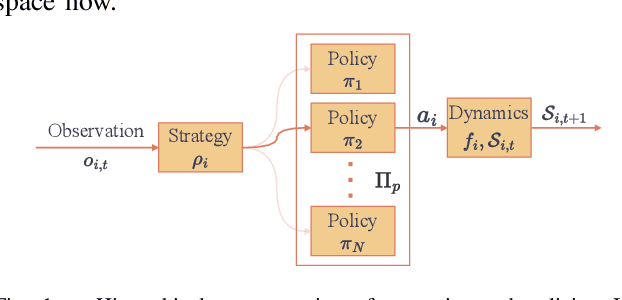
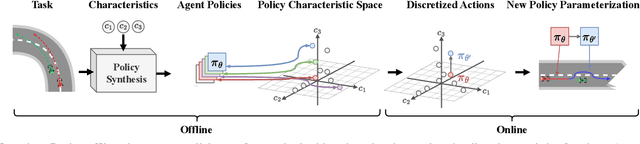


Generating competitive strategies and performing continuous motion planning simultaneously in an adversarial setting is a challenging problem. In addition, understanding the intent of other agents is crucial to deploying autonomous systems in adversarial multi-agent environments. Existing approaches either discretize agent action by grouping similar control inputs, sacrificing performance in motion planning, or plan in uninterpretable latent spaces, producing hard-to-understand agent behaviors. This paper proposes an agent strategy representation via Policy Characteristic Space that maps the agent policies to a pre-specified low-dimensional space. Policy Characteristic Space enables the discretization of agent policy switchings while preserving continuity in control. Also, it provides intepretability of agent policies and clear intentions of policy switchings. Then, regret-based game-theoretic approaches can be applied in the Policy Characteristic Space to obtain high performance in adversarial environments. Our proposed method is assessed by conducting experiments in an autonomous racing scenario using scaled vehicles. Statistical evidence shows that our method significantly improves the win rate of ego agent and the method also generalizes well to unseen environments.