 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptNC: Adaptive Nonconformity Scores for Uncertainty-Aware Autonomous Systems in Dynamic Environments
Feb 02, 2026Rigorous uncertainty quantification is essential for the safe deployment of autonomous systems in unconstrained environments. Conformal Prediction (CP) provides a distribution-free framework for this task, yet its standard formulations rely on exchangeability assumptions that are violated by the distribution shifts inherent in real-world robotics. Existing online CP methods maintain target coverage by adaptively scaling the conformal threshold, but typically employ a static nonconformity score function. We show that this fixed geometry leads to highly conservative, volume-inefficient prediction regions when environments undergo structural shifts. To address this, we propose \textbf{AdaptNC}, a framework for the joint online adaptation of both the nonconformity score parameters and the conformal threshold. AdaptNC leverages an adaptive reweighting scheme to optimize score functions, and introduces a replay buffer mechanism to mitigate the coverage instability that occurs during score transitions. We evaluate AdaptNC on diverse robotic benchmarks involving multi-agent policy changes, environmental changes and sensor degradation. Our results demonstrate that AdaptNC significantly reduces prediction region volume compared to state-of-the-art threshold-only baselines while maintaining target coverage levels.
Differentiable Predictive Control for Large-Scale Urban Road Networks
Jun 14, 2024
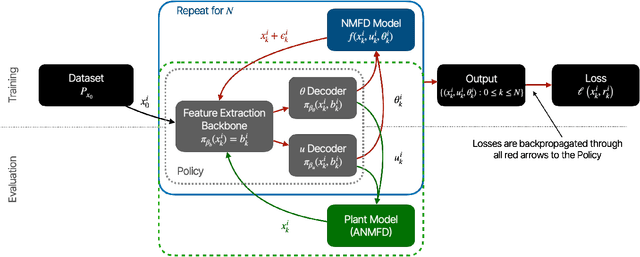
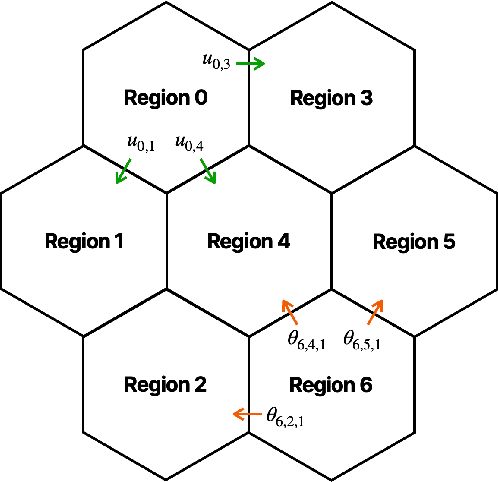

Transportation is a major contributor to CO2 emissions, making it essential to optimize traffic networks to reduce energy-related emissions. This paper presents a novel approach to traffic network control using Differentiable Predictive Control (DPC), a physics-informed machine learning methodology. We base our model on the Macroscopic Fundamental Diagram (MFD) and the Networked Macroscopic Fundamental Diagram (NMFD), offering a simplified representation of citywide traffic networks. Our approach ensures compliance with system constraints by construction. In empirical comparisons with existing state-of-the-art Model Predictive Control (MPC) methods, our approach demonstrates a 4 order of magnitude reduction in computation time and an up to 37% improvement in traffic performance. Furthermore, we assess the robustness of our controller to scenario shifts and find that it adapts well to changes in traffic patterns. This work proposes more efficient traffic control methods, particularly in large-scale urban networks, and aims to mitigate emissions and alleviate congestion in the future.
Conformal Off-Policy Prediction for Multi-Agent Systems
Mar 25, 2024

Off-Policy Prediction (OPP), i.e., predicting the outcomes of a target policy using only data collected under a nominal (behavioural) policy, is a paramount problem in data-driven analysis of safety-critical systems where the deployment of a new policy may be unsafe. To achieve dependable off-policy predictions, recent work on Conformal Off-Policy Prediction (COPP) leverage the conformal prediction framework to derive prediction regions with probabilistic guarantees under the target process. Existing COPP methods can account for the distribution shifts induced by policy switching, but are limited to single-agent systems and scalar outcomes (e.g., rewards). In this work, we introduce MA-COPP, the first conformal prediction method to solve OPP problems involving multi-agent systems, deriving joint prediction regions for all agents' trajectories when one or more "ego" agents change their policies. Unlike the single-agent scenario, this setting introduces higher complexity as the distribution shifts affect predictions for all agents, not just the ego agents, and the prediction task involves full multi-dimensional trajectories, not just reward values. A key contribution of MA-COPP is to avoid enumeration or exhaustive search of the output space of agent trajectories, which is instead required by existing COPP methods to construct the prediction region. We achieve this by showing that an over-approximation of the true JPR can be constructed, without enumeration, from the maximum density ratio of the JPR trajectories. We evaluate the effectiveness of MA-COPP in multi-agent systems from the PettingZoo library and the F1TENTH autonomous racing environment, achieving nominal coverage in higher dimensions and various shift settings.
Multi-Modal Conformal Prediction Regions by Optimizing Convex Shape Templates
Dec 12, 2023


Conformal prediction is a statistical tool for producing prediction regions for machine learning models that are valid with high probability. A key component of conformal prediction algorithms is a non-conformity score function that quantifies how different a model's prediction is from the unknown ground truth value. Essentially, these functions determine the shape and the size of the conformal prediction regions. However, little work has gone into finding non-conformity score functions that produce prediction regions that are multi-modal and practical, i.e., that can efficiently be used in engineering applications. We propose a method that optimizes parameterized shape template functions over calibration data, which results in non-conformity score functions that produce prediction regions with minimum volume. Our approach results in prediction regions that are multi-modal, so they can properly capture residuals of distributions that have multiple modes, and practical, so each region is convex and can be easily incorporated into downstream tasks, such as a motion planner using conformal prediction regions. Our method applies to general supervised learning tasks, while we illustrate its use in time-series prediction. We provide a toolbox and present illustrative case studies of F16 fighter jets and autonomous vehicles, showing an up to $68\%$ reduction in prediction region area.
Physics Constrained Motion Prediction with Uncertainty Quantification
Feb 02, 2023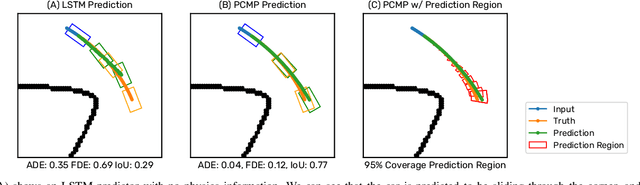
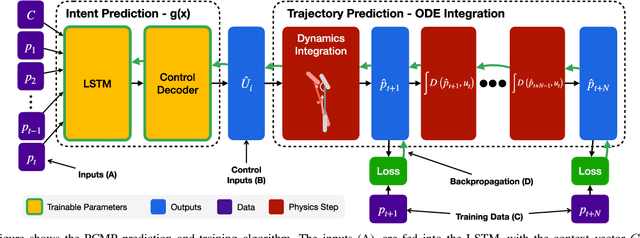
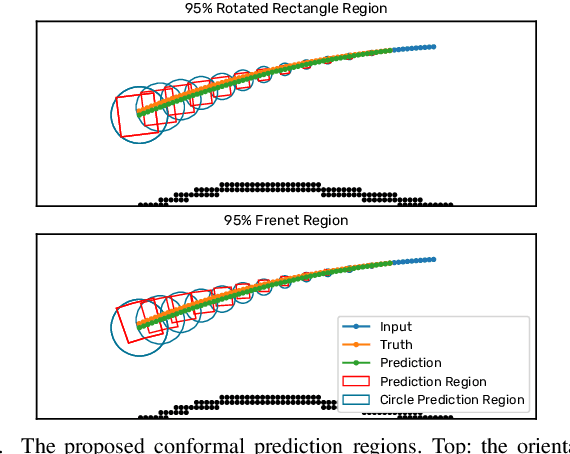
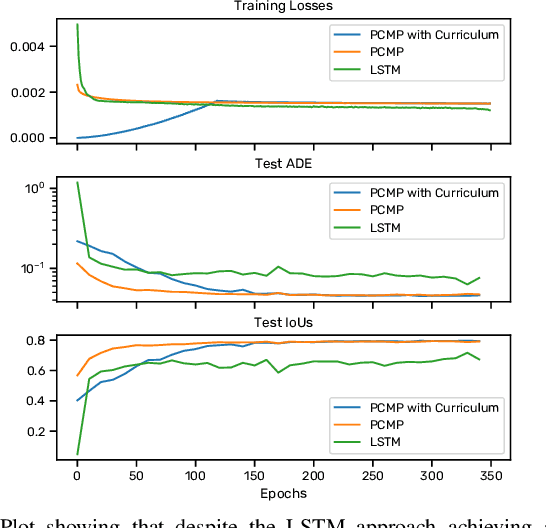
Predicting the motion of dynamic agents is a critical task for guaranteeing the safety of autonomous systems. A particular challenge is that motion prediction algorithms should obey dynamics constraints and quantify prediction uncertainty as a measure of confidence. We present a physics-constrained approach for motion prediction which uses a surrogate dynamical model to ensure that predicted trajectories are dynamically feasible. We propose a two-step integration consisting of intent and trajectory prediction subject to dynamics constraints. We also construct prediction regions that quantify uncertainty and are tailored for autonomous driving by using conformal prediction, a popular statistical tool. Physics Constrained Motion Prediction achieves a 41% better ADE, 56% better FDE, and 19% better IoU over a baseline in experiments using an autonomous racing dataset.
Winning the 3rd Japan Automotive AI Challenge -- Autonomous Racing with the Autoware.Auto Open Source Software Stack
Jun 04, 2022
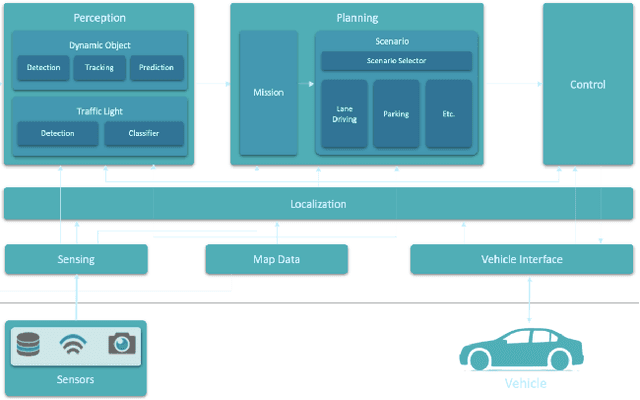
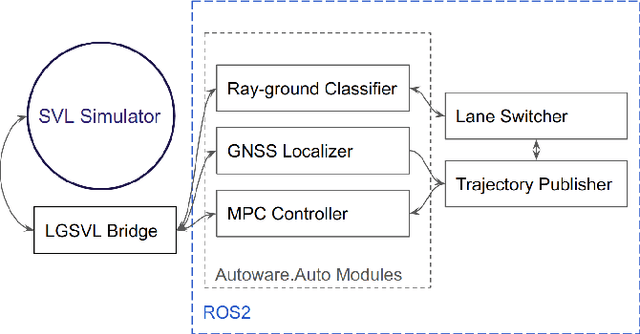
The 3rd Japan Automotive AI Challenge was an international online autonomous racing challenge where 164 teams competed in December 2021. This paper outlines the winning strategy to this competition, and the advantages and challenges of using the Autoware.Auto open source autonomous driving platform for multi-agent racing. Our winning approach includes a lane-switching opponent overtaking strategy, a global raceline optimization, and the integration of various tools from Autoware.Auto including a Model-Predictive Controller. We describe the use of perception, planning and control modules for high-speed racing applications and provide experience-based insights on working with Autoware.Auto. While our approach is a rule-based strategy that is suitable for non-interactive opponents, it provides a good reference and benchmark for learning-enabled approaches.