 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAttack Detection using Time Series Foundation Models
Jun 04, 2026This paper addresses the problem of attack detection in cyber-physical systems without any knowledge of the plant model or its structure. A remotely located plant transmits sensor measurements to an operator over a network that is assumed to be under attack. We consider two classes of attacks: model-free replay attacks and model-based stealthy attacks. For the latter, we derive closed-form expressions for the optimal stealthy attack policy against a $χ^2$ detector, for both linear and nonlinear systems. We then propose a model-structure-free detector based on TimesFM, a time-series foundation model developed by Google Research, which serves as a surrogate residual generator operating in a zero-shot fashion. We show empirically that the TimesFM-based detector achieves a comparable or superior attack detection performance. The efficacy of the proposed approach is demonstrated numerically on the IEEE 14-bus power system. We also demonstrate that TimesFM predictions can serve as a substitute for corrupted measurements, a practical mitigation technique when classical redundancy assumptions fail.
Adversarial Robustness of Deep State Space Models for Forecasting
Apr 03, 2026State-space model (SSM) for time-series forecasting have demonstrated strong empirical performance on benchmark datasets, yet their robustness under adversarial perturbations is poorly understood. We address this gap through a control-theoretic lens, focusing on the recently proposed Spacetime SSM forecaster. We first establish that the decoder-only Spacetime architecture can represent the optimal Kalman predictor when the underlying data-generating process is autoregressive - a property no other SSM possesses. Building on this, we formulate robust forecaster design as a Stackelberg game against worst-case stealthy adversaries constrained by a detection budget, and solve it via adversarial training. We derive closed-form bounds on adversarial forecasting error that expose how open-loop instability, closed-loop instability, and decoder state dimension each amplify vulnerability - offering actionable principles towards robust forecaster design. Finally, we show that even adversaries with no access to the forecaster can nonetheless construct effective attacks by exploiting the model's locally linear input-output behavior, bypassing gradient computations entirely. Experiments on the Monash benchmark datasets highlight that model-free attacks, without any gradient computation, can cause at least 33% more error than projected gradient descent with a small step size.
Contextual Safety Reasoning and Grounding for Open-World Robots
Feb 24, 2026Robots are increasingly operating in open-world environments where safe behavior depends on context: the same hallway may require different navigation strategies when crowded versus empty, or during an emergency versus normal operations. Traditional safety approaches enforce fixed constraints in user-specified contexts, limiting their ability to handle the open-ended contextual variability of real-world deployment. We address this gap via CORE, a safety framework that enables online contextual reasoning, grounding, and enforcement without prior knowledge of the environment (e.g., maps or safety specifications). CORE uses a vision-language model (VLM) to continuously reason about context-dependent safety rules directly from visual observations, grounds these rules in the physical environment, and enforces the resulting spatially-defined safe sets via control barrier functions. We provide probabilistic safety guarantees for CORE that account for perceptual uncertainty, and we demonstrate through simulation and real-world experiments that CORE enforces contextually appropriate behavior in unseen environments, significantly outperforming prior semantic safety methods that lack online contextual reasoning. Ablation studies validate our theoretical guarantees and underscore the importance of both VLM-based reasoning and spatial grounding for enforcing contextual safety in novel settings. We provide additional resources at https://zacravichandran.github.io/CORE.
Learning to Coordinate via Quantum Entanglement in Multi-Agent Reinforcement Learning
Feb 09, 2026The inability to communicate poses a major challenge to coordination in multi-agent reinforcement learning (MARL). Prior work has explored correlating local policies via shared randomness, sometimes in the form of a correlation device, as a mechanism to assist in decentralized decision-making. In contrast, this work introduces the first framework for training MARL agents to exploit shared quantum entanglement as a coordination resource, which permits a larger class of communication-free correlated policies than shared randomness alone. This is motivated by well-known results in quantum physics which posit that, for certain single-round cooperative games with no communication, shared quantum entanglement enables strategies that outperform those that only use shared randomness. In such cases, we say that there is quantum advantage. Our framework is based on a novel differentiable policy parameterization that enables optimization over quantum measurements, together with a novel policy architecture that decomposes joint policies into a quantum coordinator and decentralized local actors. To illustrate the effectiveness of our proposed method, we first show that we can learn, purely from experience, strategies that attain quantum advantage in single-round games that are treated as black box oracles. We then demonstrate how our machinery can learn policies with quantum advantage in an illustrative multi-agent sequential decision-making problem formulated as a decentralized partially observable Markov decision process (Dec-POMDP).
Uncertainty-Calibrated Prediction of Randomly-Timed Biomarker Trajectories with Conformal Bands
Nov 17, 2025Despite recent progress in predicting biomarker trajectories from real clinical data, uncertainty in the predictions poses high-stakes risks (e.g., misdiagnosis) that limit their clinical deployment. To enable safe and reliable use of such predictions in healthcare, we introduce a conformal method for uncertainty-calibrated prediction of biomarker trajectories resulting from randomly-timed clinical visits of patients. Our approach extends conformal prediction to the setting of randomly-timed trajectories via a novel nonconformity score that produces prediction bands guaranteed to cover the unknown biomarker trajectories with a user-prescribed probability. We apply our method across a wide range of standard and state-of-the-art predictors for two well-established brain biomarkers of Alzheimer's disease, using neuroimaging data from real clinical studies. We observe that our conformal prediction bands consistently achieve the desired coverage, while also being tighter than baseline prediction bands. To further account for population heterogeneity, we develop group-conditional conformal bands and test their coverage guarantees across various demographic and clinically relevant subpopulations. Moreover, we demonstrate the clinical utility of our conformal bands in identifying subjects at high risk of progression to Alzheimer's disease. Specifically, we introduce an uncertainty-calibrated risk score that enables the identification of 17.5% more high-risk subjects compared to standard risk scores, highlighting the value of uncertainty calibration in real-world clinical decision making. Our code is available at github.com/vatass/ConformalBiomarkerTrajectories.
Heterogeneous Robot Collaboration in Unstructured Environments with Grounded Generative Intelligence
Oct 30, 2025Heterogeneous robot teams operating in realistic settings often must accomplish complex missions requiring collaboration and adaptation to information acquired online. Because robot teams frequently operate in unstructured environments -- uncertain, open-world settings without prior maps -- subtasks must be grounded in robot capabilities and the physical world. While heterogeneous teams have typically been designed for fixed specifications, generative intelligence opens the possibility of teams that can accomplish a wide range of missions described in natural language. However, current large language model (LLM)-enabled teaming methods typically assume well-structured and known environments, limiting deployment in unstructured environments. We present SPINE-HT, a framework that addresses these limitations by grounding the reasoning abilities of LLMs in the context of a heterogeneous robot team through a three-stage process. Given language specifications describing mission goals and team capabilities, an LLM generates grounded subtasks which are validated for feasibility. Subtasks are then assigned to robots based on capabilities such as traversability or perception and refined given feedback collected during online operation. In simulation experiments with closed-loop perception and control, our framework achieves nearly twice the success rate compared to prior LLM-enabled heterogeneous teaming approaches. In real-world experiments with a Clearpath Jackal, a Clearpath Husky, a Boston Dynamics Spot, and a high-altitude UAV, our method achieves an 87\% success rate in missions requiring reasoning about robot capabilities and refining subtasks with online feedback. More information is provided at https://zacravichandran.github.io/SPINE-HT.
Benchmarking Misuse Mitigation Against Covert Adversaries
Jun 06, 2025Existing language model safety evaluations focus on overt attacks and low-stakes tasks. Realistic attackers can subvert current safeguards by requesting help on small, benign-seeming tasks across many independent queries. Because individual queries do not appear harmful, the attack is hard to {detect}. However, when combined, these fragments uplift misuse by helping the attacker complete hard and dangerous tasks. Toward identifying defenses against such strategies, we develop Benchmarks for Stateful Defenses (BSD), a data generation pipeline that automates evaluations of covert attacks and corresponding defenses. Using this pipeline, we curate two new datasets that are consistently refused by frontier models and are too difficult for weaker open-weight models. Our evaluations indicate that decomposition attacks are effective misuse enablers, and highlight stateful defenses as a countermeasure.
Air-Ground Collaboration for Language-Specified Missions in Unknown Environments
May 14, 2025As autonomous robotic systems become increasingly mature, users will want to specify missions at the level of intent rather than in low-level detail. Language is an expressive and intuitive medium for such mission specification. However, realizing language-guided robotic teams requires overcoming significant technical hurdles. Interpreting and realizing language-specified missions requires advanced semantic reasoning. Successful heterogeneous robots must effectively coordinate actions and share information across varying viewpoints. Additionally, communication between robots is typically intermittent, necessitating robust strategies that leverage communication opportunities to maintain coordination and achieve mission objectives. In this work, we present a first-of-its-kind system where an unmanned aerial vehicle (UAV) and an unmanned ground vehicle (UGV) are able to collaboratively accomplish missions specified in natural language while reacting to changes in specification on the fly. We leverage a Large Language Model (LLM)-enabled planner to reason over semantic-metric maps that are built online and opportunistically shared between an aerial and a ground robot. We consider task-driven navigation in urban and rural areas. Our system must infer mission-relevant semantics and actively acquire information via semantic mapping. In both ground and air-ground teaming experiments, we demonstrate our system on seven different natural-language specifications at up to kilometer-scale navigation.
Deploying Foundation Model-Enabled Air and Ground Robots in the Field: Challenges and Opportunities
May 14, 2025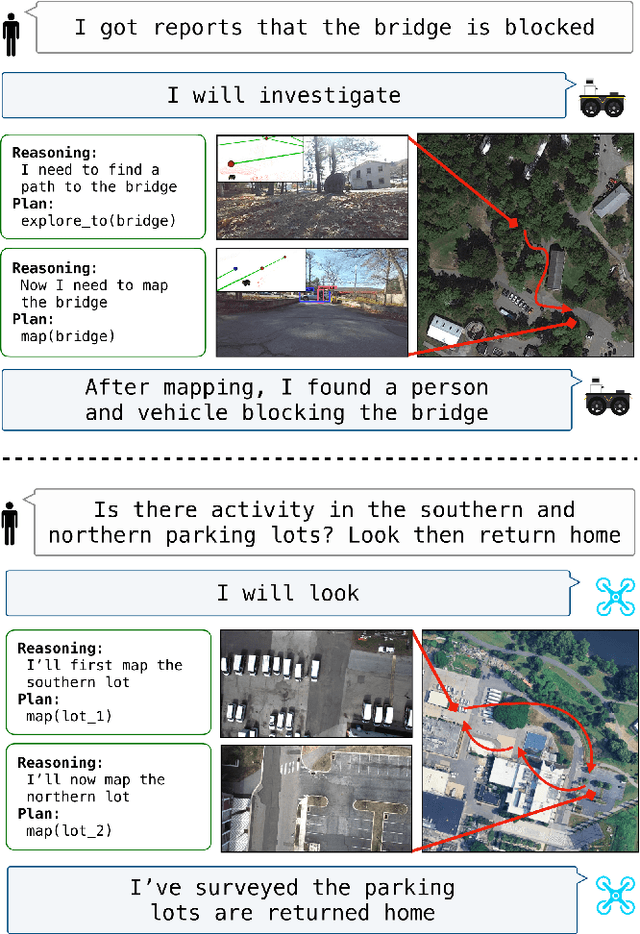
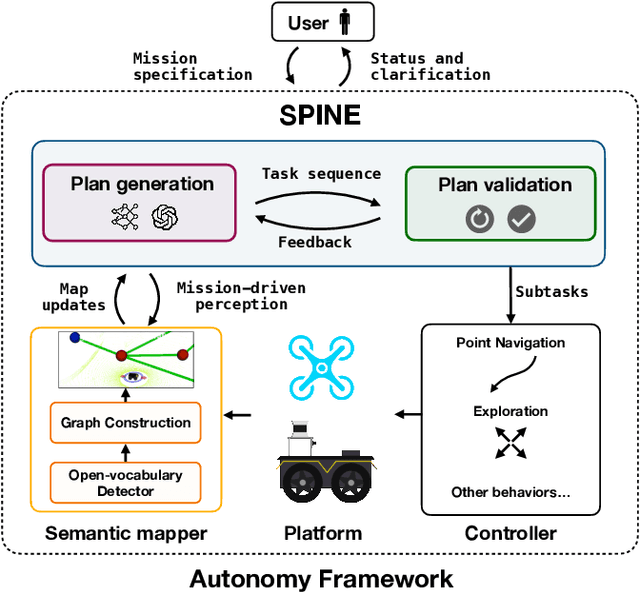
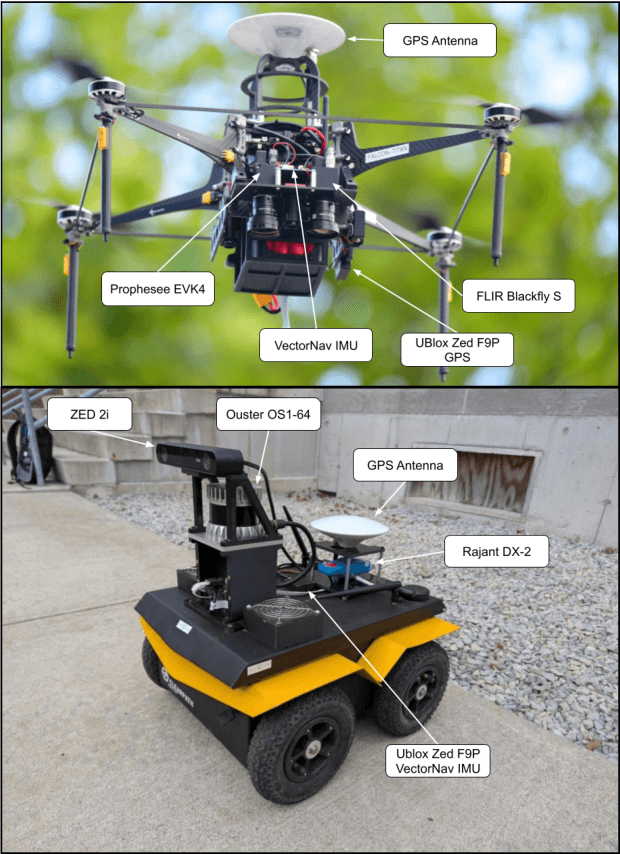
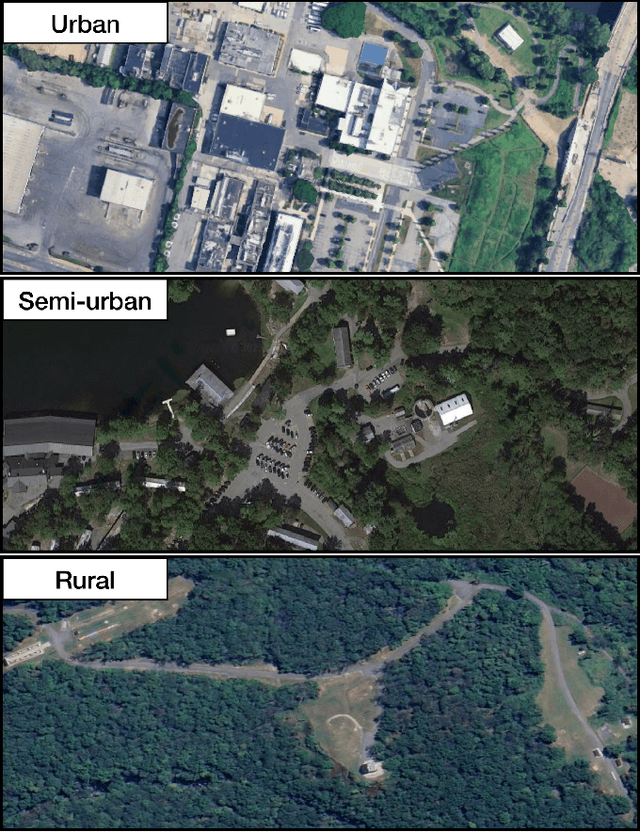
The integration of foundation models (FMs) into robotics has enabled robots to understand natural language and reason about the semantics in their environments. However, existing FM-enabled robots primary operate in closed-world settings, where the robot is given a full prior map or has a full view of its workspace. This paper addresses the deployment of FM-enabled robots in the field, where missions often require a robot to operate in large-scale and unstructured environments. To effectively accomplish these missions, robots must actively explore their environments, navigate obstacle-cluttered terrain, handle unexpected sensor inputs, and operate with compute constraints. We discuss recent deployments of SPINE, our LLM-enabled autonomy framework, in field robotic settings. To the best of our knowledge, we present the first demonstration of large-scale LLM-enabled robot planning in unstructured environments with several kilometers of missions. SPINE is agnostic to a particular LLM, which allows us to distill small language models capable of running onboard size, weight and power (SWaP) limited platforms. Via preliminary model distillation work, we then present the first language-driven UAV planner using on-device language models. We conclude our paper by proposing several promising directions for future research.
Learning with Imperfect Models: When Multi-step Prediction Mitigates Compounding Error
Apr 02, 2025



Compounding error, where small prediction mistakes accumulate over time, presents a major challenge in learning-based control. For example, this issue often limits the performance of model-based reinforcement learning and imitation learning. One common approach to mitigate compounding error is to train multi-step predictors directly, rather than relying on autoregressive rollout of a single-step model. However, it is not well understood when the benefits of multi-step prediction outweigh the added complexity of learning a more complicated model. In this work, we provide a rigorous analysis of this trade-off in the context of linear dynamical systems. We show that when the model class is well-specified and accurately captures the system dynamics, single-step models achieve lower asymptotic prediction error. On the other hand, when the model class is misspecified due to partial observability, direct multi-step predictors can significantly reduce bias and thus outperform single-step approaches. These theoretical results are supported by numerical experiments, wherein we also (a) empirically evaluate an intermediate strategy which trains a single-step model using a multi-step loss and (b) evaluate performance of single step and multi-step predictors in a closed loop control setting.