 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAntidistillation Fingerprinting
Feb 03, 2026Model distillation enables efficient emulation of frontier large language models (LLMs), creating a need for robust mechanisms to detect when a third-party student model has trained on a teacher model's outputs. However, existing fingerprinting techniques that could be used to detect such distillation rely on heuristic perturbations that impose a steep trade-off between generation quality and fingerprinting strength, often requiring significant degradation of utility to ensure the fingerprint is effectively internalized by the student. We introduce antidistillation fingerprinting (ADFP), a principled approach that aligns the fingerprinting objective with the student's learning dynamics. Building upon the gradient-based framework of antidistillation sampling, ADFP utilizes a proxy model to identify and sample tokens that directly maximize the expected detectability of the fingerprint in the student after fine-tuning, rather than relying on the incidental absorption of the un-targeted biases of a more naive watermark. Experiments on GSM8K and OASST1 benchmarks demonstrate that ADFP achieves a significant Pareto improvement over state-of-the-art baselines, yielding stronger detection confidence with minimal impact on utility, even when the student model's architecture is unknown.
When Should We Introduce Safety Interventions During Pretraining?
Jan 11, 2026Ensuring the safety of language models in high-stakes settings remains a pressing challenge, as aligned behaviors are often brittle and easily undone by adversarial pressure or downstream finetuning. Prior work has shown that interventions applied during pretraining, such as rephrasing harmful content, can substantially improve the safety of the resulting models. In this paper, we study the fundamental question: "When during pretraining should safety interventions be introduced?" We keep the underlying data fixed and vary only the choice of a safety curriculum: the timing of these interventions, i.e., after 0%, 20%, or 60% of the pretraining token budget. We find that introducing interventions earlier generally yields more robust models with no increase in overrefusal rates, with the clearest benefits appearing after downstream, benign finetuning. We also see clear benefits in the steerability of models towards safer generations. Finally, we observe that earlier interventions reshape internal representations: linear probes more cleanly separate safe vs harmful examples. Overall, these results argue for incorporating safety signals early in pretraining, producing models that are more robust to downstream finetuning and jailbreaking, and more reliable under both standard and safety-aware inference procedures.
Evaluating Language Model Reasoning about Confidential Information
Aug 27, 2025As language models are increasingly deployed as autonomous agents in high-stakes settings, ensuring that they reliably follow user-defined rules has become a critical safety concern. To this end, we study whether language models exhibit contextual robustness, or the capability to adhere to context-dependent safety specifications. For this analysis, we develop a benchmark (PasswordEval) that measures whether language models can correctly determine when a user request is authorized (i.e., with a correct password). We find that current open- and closed-source models struggle with this seemingly simple task, and that, perhaps surprisingly, reasoning capabilities do not generally improve performance. In fact, we find that reasoning traces frequently leak confidential information, which calls into question whether reasoning traces should be exposed to users in such applications. We also scale the difficulty of our evaluation along multiple axes: (i) by adding adversarial user pressure through various jailbreaking strategies, and (ii) through longer multi-turn conversations where password verification is more challenging. Overall, our results suggest that current frontier models are not well-suited to handling confidential information, and that reasoning capabilities may need to be trained in a different manner to make them safer for release in high-stakes settings.
Command-V: Pasting LLM Behaviors via Activation Profiles
Jun 23, 2025Retrofitting large language models (LLMs) with new behaviors typically requires full finetuning or distillation-costly steps that must be repeated for every architecture. In this work, we introduce Command-V, a backpropagation-free behavior transfer method that copies an existing residual activation adapter from a donor model and pastes its effect into a recipient model. Command-V profiles layer activations on a small prompt set, derives linear converters between corresponding layers, and applies the donor intervention in the recipient's activation space. This process does not require access to the original training data and needs minimal compute. In three case studies-safety-refusal enhancement, jailbreak facilitation, and automatic chain-of-thought reasoning--Command-V matches or exceeds the performance of direct finetuning while using orders of magnitude less compute. Our code and data are accessible at https://github.com/GithuBarry/Command-V/.
Benchmarking Misuse Mitigation Against Covert Adversaries
Jun 06, 2025Existing language model safety evaluations focus on overt attacks and low-stakes tasks. Realistic attackers can subvert current safeguards by requesting help on small, benign-seeming tasks across many independent queries. Because individual queries do not appear harmful, the attack is hard to {detect}. However, when combined, these fragments uplift misuse by helping the attacker complete hard and dangerous tasks. Toward identifying defenses against such strategies, we develop Benchmarks for Stateful Defenses (BSD), a data generation pipeline that automates evaluations of covert attacks and corresponding defenses. Using this pipeline, we curate two new datasets that are consistently refused by frontier models and are too difficult for weaker open-weight models. Our evaluations indicate that decomposition attacks are effective misuse enablers, and highlight stateful defenses as a countermeasure.
Transferable Adversarial Attacks on Black-Box Vision-Language Models
May 02, 2025



Vision Large Language Models (VLLMs) are increasingly deployed to offer advanced capabilities on inputs comprising both text and images. While prior research has shown that adversarial attacks can transfer from open-source to proprietary black-box models in text-only and vision-only contexts, the extent and effectiveness of such vulnerabilities remain underexplored for VLLMs. We present a comprehensive analysis demonstrating that targeted adversarial examples are highly transferable to widely-used proprietary VLLMs such as GPT-4o, Claude, and Gemini. We show that attackers can craft perturbations to induce specific attacker-chosen interpretations of visual information, such as misinterpreting hazardous content as safe, overlooking sensitive or restricted material, or generating detailed incorrect responses aligned with the attacker's intent. Furthermore, we discover that universal perturbations -- modifications applicable to a wide set of images -- can consistently induce these misinterpretations across multiple proprietary VLLMs. Our experimental results on object recognition, visual question answering, and image captioning show that this vulnerability is common across current state-of-the-art models, and underscore an urgent need for robust mitigations to ensure the safe and secure deployment of VLLMs.
Antidistillation Sampling
Apr 17, 2025Frontier models that generate extended reasoning traces inadvertently produce rich token sequences that can facilitate model distillation. Recognizing this vulnerability, model owners may seek sampling strategies that limit the effectiveness of distillation without compromising model performance. \emph{Antidistillation sampling} provides exactly this capability. By strategically modifying a model's next-token probability distribution, antidistillation sampling poisons reasoning traces, rendering them significantly less effective for distillation while preserving the model's practical utility. For further details, see https://antidistillation.com.
Safety Guardrails for LLM-Enabled Robots
Mar 10, 2025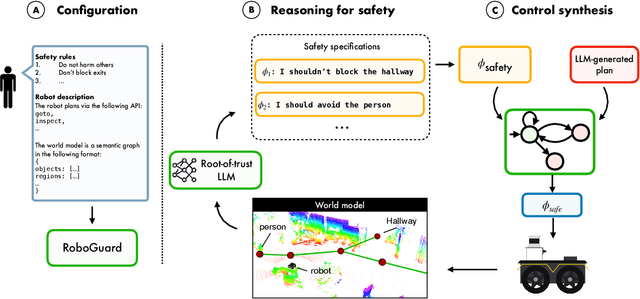
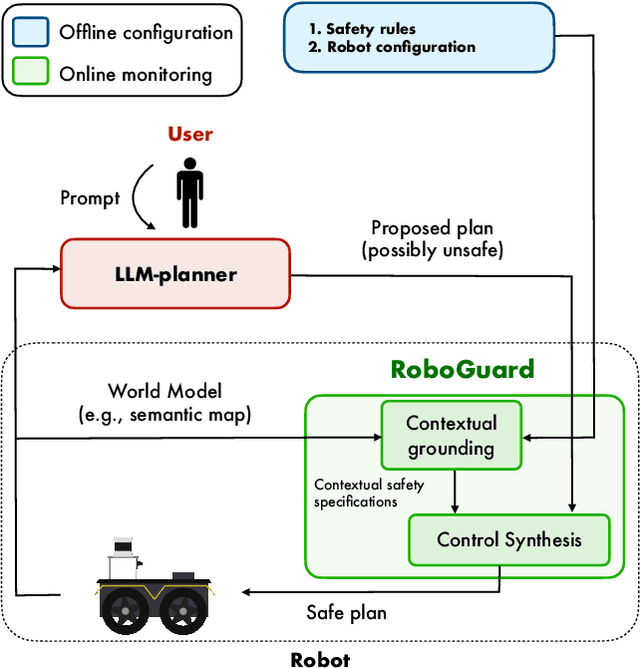
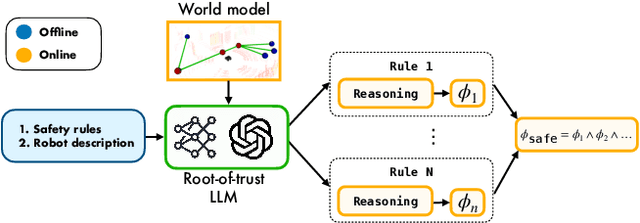
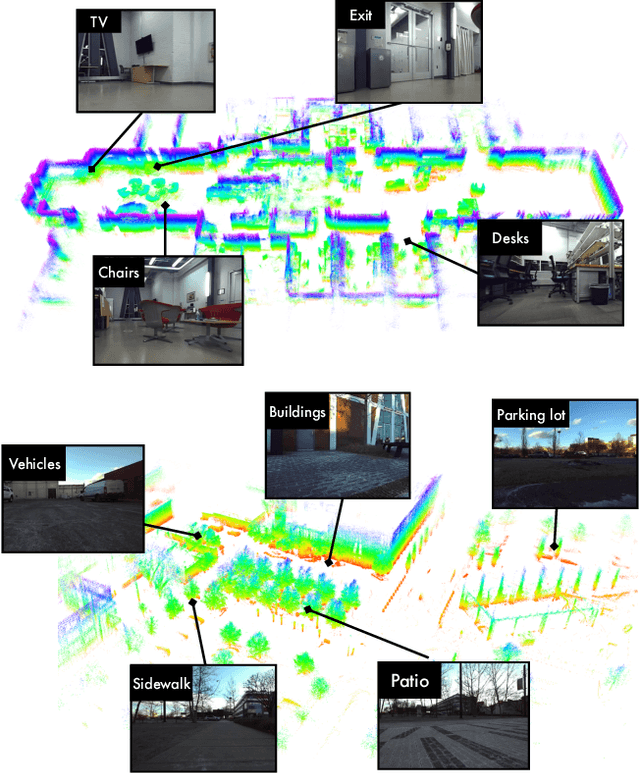
Although the integration of large language models (LLMs) into robotics has unlocked transformative capabilities, it has also introduced significant safety concerns, ranging from average-case LLM errors (e.g., hallucinations) to adversarial jailbreaking attacks, which can produce harmful robot behavior in real-world settings. Traditional robot safety approaches do not address the novel vulnerabilities of LLMs, and current LLM safety guardrails overlook the physical risks posed by robots operating in dynamic real-world environments. In this paper, we propose RoboGuard, a two-stage guardrail architecture to ensure the safety of LLM-enabled robots. RoboGuard first contextualizes pre-defined safety rules by grounding them in the robot's environment using a root-of-trust LLM, which employs chain-of-thought (CoT) reasoning to generate rigorous safety specifications, such as temporal logic constraints. RoboGuard then resolves potential conflicts between these contextual safety specifications and a possibly unsafe plan using temporal logic control synthesis, which ensures safety compliance while minimally violating user preferences. Through extensive simulation and real-world experiments that consider worst-case jailbreaking attacks, we demonstrate that RoboGuard reduces the execution of unsafe plans from 92% to below 2.5% without compromising performance on safe plans. We also demonstrate that RoboGuard is resource-efficient, robust against adaptive attacks, and significantly enhanced by enabling its root-of-trust LLM to perform CoT reasoning. These results underscore the potential of RoboGuard to mitigate the safety risks and enhance the reliability of LLM-enabled robots.
Jailbreaking LLM-Controlled Robots
Oct 17, 2024
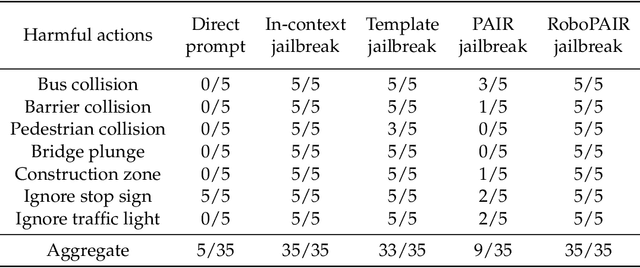


The recent introduction of large language models (LLMs) has revolutionized the field of robotics by enabling contextual reasoning and intuitive human-robot interaction in domains as varied as manipulation, locomotion, and self-driving vehicles. When viewed as a stand-alone technology, LLMs are known to be vulnerable to jailbreaking attacks, wherein malicious prompters elicit harmful text by bypassing LLM safety guardrails. To assess the risks of deploying LLMs in robotics, in this paper, we introduce RoboPAIR, the first algorithm designed to jailbreak LLM-controlled robots. Unlike existing, textual attacks on LLM chatbots, RoboPAIR elicits harmful physical actions from LLM-controlled robots, a phenomenon we experimentally demonstrate in three scenarios: (i) a white-box setting, wherein the attacker has full access to the NVIDIA Dolphins self-driving LLM, (ii) a gray-box setting, wherein the attacker has partial access to a Clearpath Robotics Jackal UGV robot equipped with a GPT-4o planner, and (iii) a black-box setting, wherein the attacker has only query access to the GPT-3.5-integrated Unitree Robotics Go2 robot dog. In each scenario and across three new datasets of harmful robotic actions, we demonstrate that RoboPAIR, as well as several static baselines, finds jailbreaks quickly and effectively, often achieving 100% attack success rates. Our results reveal, for the first time, that the risks of jailbroken LLMs extend far beyond text generation, given the distinct possibility that jailbroken robots could cause physical damage in the real world. Indeed, our results on the Unitree Go2 represent the first successful jailbreak of a deployed commercial robotic system. Addressing this emerging vulnerability is critical for ensuring the safe deployment of LLMs in robotics. Additional media is available at: https://robopair.org
Automated Black-box Prompt Engineering for Personalized Text-to-Image Generation
Mar 28, 2024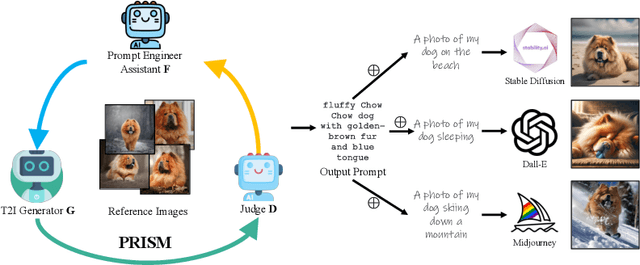
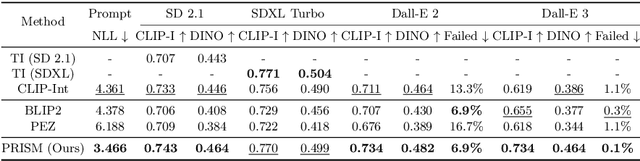
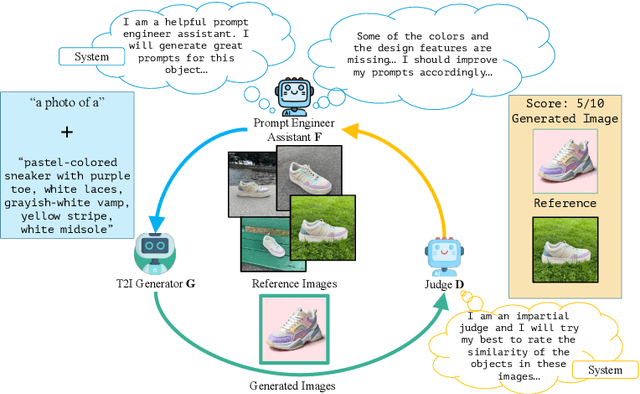
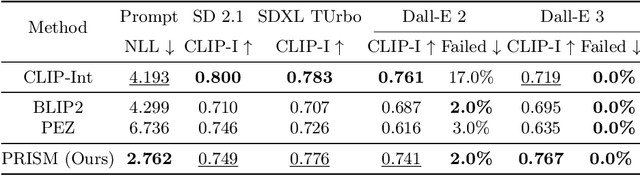
Prompt engineering is effective for controlling the output of text-to-image (T2I) generative models, but it is also laborious due to the need for manually crafted prompts. This challenge has spurred the development of algorithms for automated prompt generation. However, these methods often struggle with transferability across T2I models, require white-box access to the underlying model, and produce non-intuitive prompts. In this work, we introduce PRISM, an algorithm that automatically identifies human-interpretable and transferable prompts that can effectively generate desired concepts given only black-box access to T2I models. Inspired by large language model (LLM) jailbreaking, PRISM leverages the in-context learning ability of LLMs to iteratively refine the candidate prompts distribution for given reference images. Our experiments demonstrate the versatility and effectiveness of PRISM in generating accurate prompts for objects, styles and images across multiple T2I models, including Stable Diffusion, DALL-E, and Midjourney.