 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Driven Modeling and Verification of Perception-Based Autonomous Systems
Paper and Code
Dec 11, 2023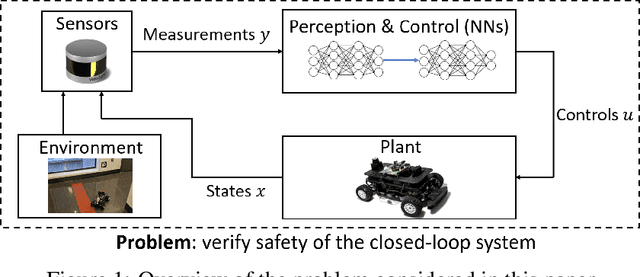

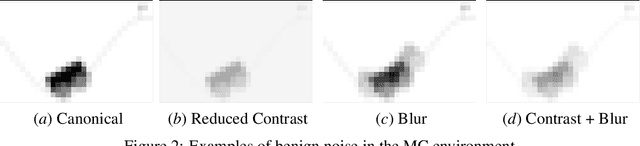
This paper addresses the problem of data-driven modeling and verification of perception-based autonomous systems. We assume the perception model can be decomposed into a canonical model (obtained from first principles or a simulator) and a noise model that contains the measurement noise introduced by the real environment. We focus on two types of noise, benign and adversarial noise, and develop a data-driven model for each type using generative models and classifiers, respectively. We show that the trained models perform well according to a variety of evaluation metrics based on downstream tasks such as state estimation and control. Finally, we verify the safety of two systems with high-dimensional data-driven models, namely an image-based version of mountain car (a reinforcement learning benchmark) as well as the F1/10 car, which uses LiDAR measurements to navigate a racing track.