 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeREBAR: Reference Ethical Benchmark for Autonomy Readiness
May 18, 2026As autonomous systems grow more advanced, objective metrics to evaluate their ethical and legal compliance are critical for informing end users of their limitations and ensuring accountability of those who misuse them. Current ethical embodied AI frameworks remain mostly qualitative, focusing on system design (through safety guardrails or targeted red teaming), and the realized guardrails often directly disallow unsafe behavior without providing the user with an override or interpretable reason. Instead, there is a need for computable metrics through rigorous testing that allow a user to determine the applicability of the system to the task. To address this gap, we introduce the Reference Ethical Benchmark for Autonomy Readiness (REBAR), a quantitative test and evaluation framework for autonomous systems. REBAR maps operating metrics into a computable Autonomy Readiness Level (ARL) rubric that can quantify ethical performance. Key innovations of the framework include a neuro-symbolic Large Language Model (LLM) approach to calculate and explain the ethical difficulty of scenarios, LLM-driven at-scale generation of test instances, and a versatile, photorealistic simulation environment. By evaluating white-box autonomy solutions through this rigorous testing pipeline, REBAR delivers an objective and repeatable benchmark score, bridging the gap between abstract principles and verifiable, accountable autonomy.
Heterogeneous Robot Collaboration in Unstructured Environments with Grounded Generative Intelligence
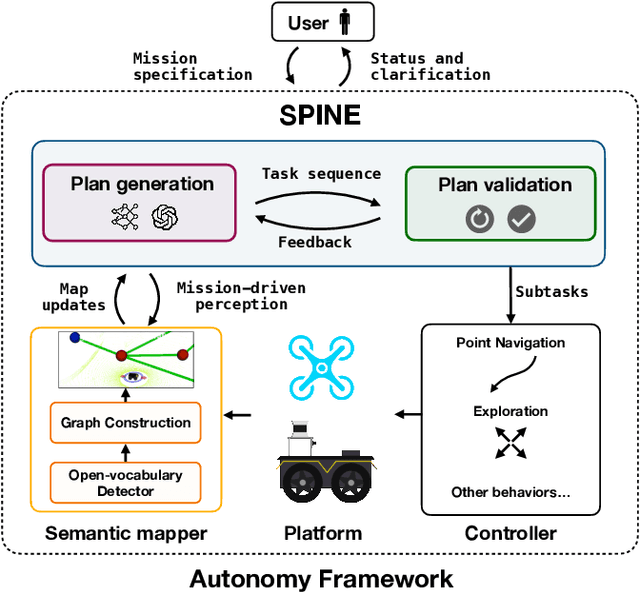
Oct 30, 2025Heterogeneous robot teams operating in realistic settings often must accomplish complex missions requiring collaboration and adaptation to information acquired online. Because robot teams frequently operate in unstructured environments -- uncertain, open-world settings without prior maps -- subtasks must be grounded in robot capabilities and the physical world. While heterogeneous teams have typically been designed for fixed specifications, generative intelligence opens the possibility of teams that can accomplish a wide range of missions described in natural language. However, current large language model (LLM)-enabled teaming methods typically assume well-structured and known environments, limiting deployment in unstructured environments. We present SPINE-HT, a framework that addresses these limitations by grounding the reasoning abilities of LLMs in the context of a heterogeneous robot team through a three-stage process. Given language specifications describing mission goals and team capabilities, an LLM generates grounded subtasks which are validated for feasibility. Subtasks are then assigned to robots based on capabilities such as traversability or perception and refined given feedback collected during online operation. In simulation experiments with closed-loop perception and control, our framework achieves nearly twice the success rate compared to prior LLM-enabled heterogeneous teaming approaches. In real-world experiments with a Clearpath Jackal, a Clearpath Husky, a Boston Dynamics Spot, and a high-altitude UAV, our method achieves an 87\% success rate in missions requiring reasoning about robot capabilities and refining subtasks with online feedback. More information is provided at https://zacravichandran.github.io/SPINE-HT.
Robotic Monitoring of Colorimetric Leaf Sensors for Precision Agriculture
May 20, 2025Current remote sensing technologies that measure crop health e.g. RGB, multispectral, hyperspectral, and LiDAR, are indirect, and cannot capture plant stress indicators directly. Instead, low-cost leaf sensors that directly interface with the crop surface present an opportunity to advance real-time direct monitoring. To this end, we co-design a sensor-detector system, where the sensor is a novel colorimetric leaf sensor that directly measures crop health in a precision agriculture setting, and the detector autonomously obtains optical signals from these leaf sensors. This system integrates a ground robot platform with an on-board monocular RGB camera and object detector to localize the leaf sensor, and a hyperspectral camera with motorized mirror and an on-board halogen light to acquire a hyperspectral reflectance image of the leaf sensor, from which a spectral response characterizing crop health can be extracted. We show a successful demonstration of our co-designed system operating in outdoor environments, obtaining spectra that are interpretable when compared to controlled laboratory-grade spectrometer measurements. The system is demonstrated in row-crop environments both indoors and outdoors where it is able to autonomously navigate, locate and obtain a hyperspectral image of all leaf sensors present, and retrieve interpretable spectral resonance from leaf sensors.
Gaussian Splatting as a Unified Representation for Autonomy in Unstructured Environments
May 17, 2025In this work, we argue that Gaussian splatting is a suitable unified representation for autonomous robot navigation in large-scale unstructured outdoor environments. Such environments require representations that can capture complex structures while remaining computationally tractable for real-time navigation. We demonstrate that the dense geometric and photometric information provided by a Gaussian splatting representation is useful for navigation in unstructured environments. Additionally, semantic information can be embedded in the Gaussian map to enable large-scale task-driven navigation. From the lessons learned through our experiments, we highlight several challenges and opportunities arising from the use of such a representation for robot autonomy.
Deploying Foundation Model-Enabled Air and Ground Robots in the Field: Challenges and Opportunities
May 14, 2025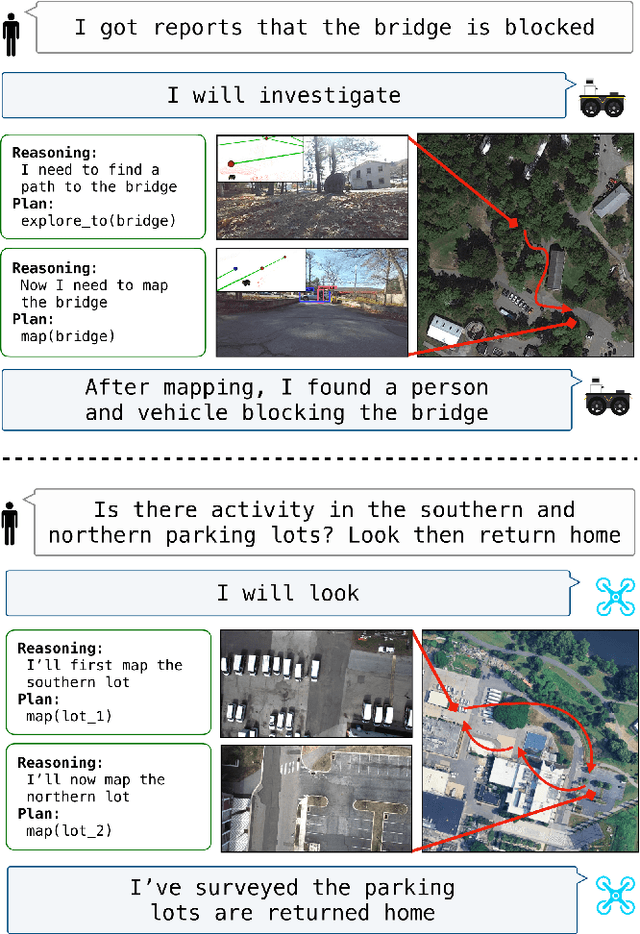
The integration of foundation models (FMs) into robotics has enabled robots to understand natural language and reason about the semantics in their environments. However, existing FM-enabled robots primary operate in closed-world settings, where the robot is given a full prior map or has a full view of its workspace. This paper addresses the deployment of FM-enabled robots in the field, where missions often require a robot to operate in large-scale and unstructured environments. To effectively accomplish these missions, robots must actively explore their environments, navigate obstacle-cluttered terrain, handle unexpected sensor inputs, and operate with compute constraints. We discuss recent deployments of SPINE, our LLM-enabled autonomy framework, in field robotic settings. To the best of our knowledge, we present the first demonstration of large-scale LLM-enabled robot planning in unstructured environments with several kilometers of missions. SPINE is agnostic to a particular LLM, which allows us to distill small language models capable of running onboard size, weight and power (SWaP) limited platforms. Via preliminary model distillation work, we then present the first language-driven UAV planner using on-device language models. We conclude our paper by proposing several promising directions for future research.
Air-Ground Collaboration for Language-Specified Missions in Unknown Environments
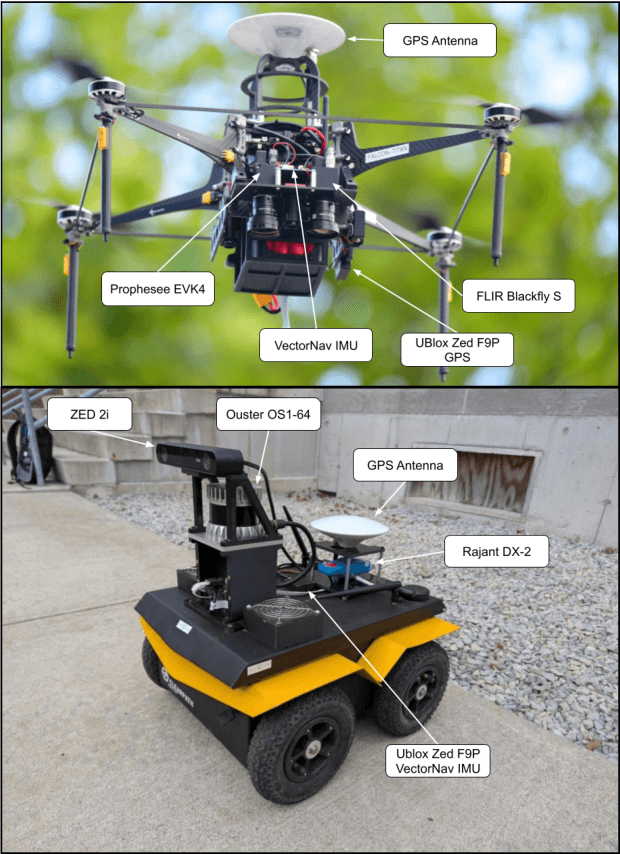
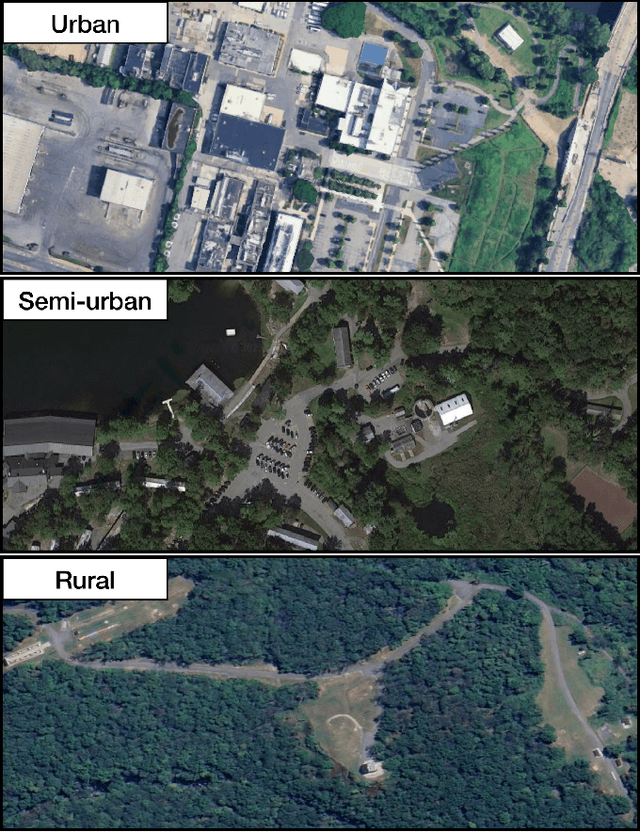
May 14, 2025As autonomous robotic systems become increasingly mature, users will want to specify missions at the level of intent rather than in low-level detail. Language is an expressive and intuitive medium for such mission specification. However, realizing language-guided robotic teams requires overcoming significant technical hurdles. Interpreting and realizing language-specified missions requires advanced semantic reasoning. Successful heterogeneous robots must effectively coordinate actions and share information across varying viewpoints. Additionally, communication between robots is typically intermittent, necessitating robust strategies that leverage communication opportunities to maintain coordination and achieve mission objectives. In this work, we present a first-of-its-kind system where an unmanned aerial vehicle (UAV) and an unmanned ground vehicle (UGV) are able to collaboratively accomplish missions specified in natural language while reacting to changes in specification on the fly. We leverage a Large Language Model (LLM)-enabled planner to reason over semantic-metric maps that are built online and opportunistically shared between an aerial and a ground robot. We consider task-driven navigation in urban and rural areas. Our system must infer mission-relevant semantics and actively acquire information via semantic mapping. In both ground and air-ground teaming experiments, we demonstrate our system on seven different natural-language specifications at up to kilometer-scale navigation.
ATLAS Navigator: Active Task-driven LAnguage-embedded Gaussian Splatting
Feb 27, 2025We address the challenge of task-oriented navigation in unstructured and unknown environments, where robots must incrementally build and reason on rich, metric-semantic maps in real time. Since tasks may require clarification or re-specification, it is necessary for the information in the map to be rich enough to enable generalization across a wide range of tasks. To effectively execute tasks specified in natural language, we propose a hierarchical representation built on language-embedded Gaussian splatting that enables both sparse semantic planning that lends itself to online operation and dense geometric representation for collision-free navigation. We validate the effectiveness of our method through real-world robot experiments conducted in both cluttered indoor and kilometer-scale outdoor environments, with a competitive ratio of about 60% against privileged baselines. Experiment videos and more details can be found on our project page: https://atlasnav.github.io
Learning autonomous driving from aerial imagery
Oct 18, 2024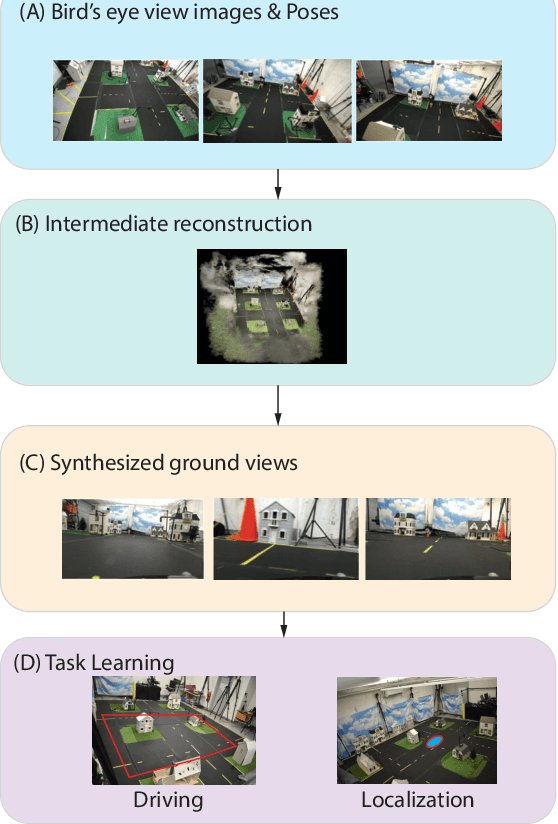
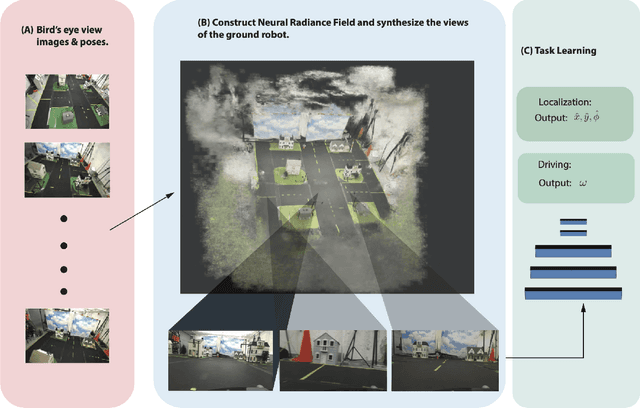
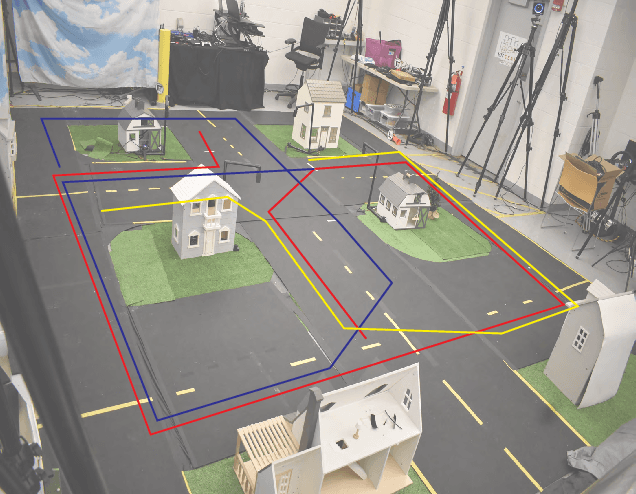
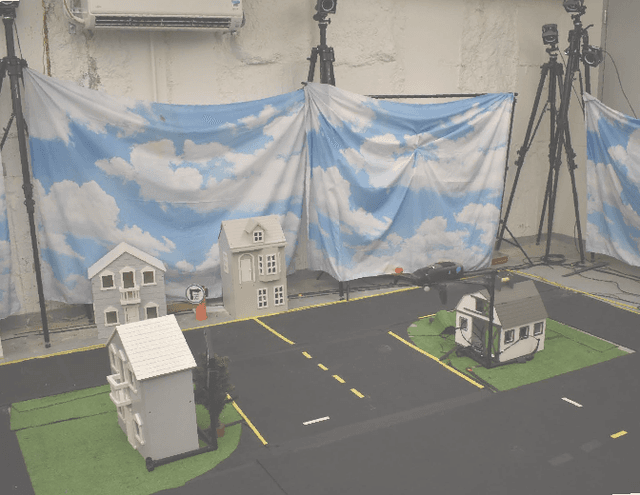
In this work, we consider the problem of learning end to end perception to control for ground vehicles solely from aerial imagery. Photogrammetric simulators allow the synthesis of novel views through the transformation of pre-generated assets into novel views.However, they have a large setup cost, require careful collection of data and often human effort to create usable simulators. We use a Neural Radiance Field (NeRF) as an intermediate representation to synthesize novel views from the point of view of a ground vehicle. These novel viewpoints can then be used for several downstream autonomous navigation applications. In this work, we demonstrate the utility of novel view synthesis though the application of training a policy for end to end learning from images and depth data. In a traditional real to sim to real framework, the collected data would be transformed into a visual simulator which could then be used to generate novel views. In contrast, using a NeRF allows a compact representation and the ability to optimize over the parameters of the visual simulator as more data is gathered in the environment. We demonstrate the efficacy of our method in a custom built mini-city environment through the deployment of imitation policies on robotic cars. We additionally consider the task of place localization and demonstrate that our method is able to relocalize the car in the real world.
SPINE: Online Semantic Planning for Missions with Incomplete Natural Language Specifications in Unstructured Environments
Oct 03, 2024



As robots become increasingly capable, users will want to describe high-level missions and have robots fill in the gaps. In many realistic settings, pre-built maps are difficult to obtain, so execution requires exploration and mapping that are necessary and specific to the mission. Consider an emergency response scenario where a user commands a robot, "triage impacted regions." The robot must infer relevant semantics (victims, etc.) and exploration targets (damaged regions) based on priors or other context, then explore and refine its plan online. These missions are incompletely specified, meaning they imply subtasks and semantics. While many semantic planning methods operate online, they are typically designed for well specified tasks such as object search or exploration. Recently, Large Language Models (LLMs) have demonstrated powerful contextual reasoning over a range of robotic tasks described in natural language. However, existing LLM planners typically do not consider online planning or complex missions; rather, relevant subtasks are provided by a pre-built map or a user. We address these limitations via SPINE (online Semantic Planner for missions with Incomplete Natural language specifications in unstructured Environments). SPINE uses an LLM to reason about subtasks implied by the mission then realizes these subtasks in a receding horizon framework. Tasks are automatically validated for safety and refined online with new observations. We evaluate SPINE in simulation and real-world settings. Evaluation missions require multiple steps of semantic reasoning and exploration in cluttered outdoor environments of over 20,000m$^2$ area. We evaluate SPINE against competitive baselines in single-agent and air-ground teaming applications. Please find videos and software on our project page: https://zacravichandran.github.io/SPINE
RT-GuIDE: Real-Time Gaussian splatting for Information-Driven Exploration
Sep 26, 2024



We propose a framework for active mapping and exploration that leverages Gaussian splatting for constructing information-rich maps. Further, we develop a parallelized motion planning algorithm that can exploit the Gaussian map for real-time navigation. The Gaussian map constructed onboard the robot is optimized for both photometric and geometric quality while enabling real-time situational awareness for autonomy. We show through simulation experiments that our method is competitive with approaches that use alternate information gain metrics, while being orders of magnitude faster to compute. In real-world experiments, our algorithm achieves better map quality (10% higher Peak Signal-to-Noise Ratio (PSNR) and 30% higher geometric reconstruction accuracy) than Gaussian maps constructed by traditional exploration baselines. Experiment videos and more details can be found on our project page: https://tyuezhan.github.io/RT_GuIDE/