 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKoopMotion: Learning Almost Divergence Free Koopman Flow Fields for Motion Planning
Sep 11, 2025In this work, we propose a novel flow field-based motion planning method that drives a robot from any initial state to a desired reference trajectory such that it converges to the trajectory's end point. Despite demonstrated efficacy in using Koopman operator theory for modeling dynamical systems, Koopman does not inherently enforce convergence to desired trajectories nor to specified goals -- a requirement when learning from demonstrations (LfD). We present KoopMotion which represents motion flow fields as dynamical systems, parameterized by Koopman Operators to mimic desired trajectories, and leverages the divergence properties of the learnt flow fields to obtain smooth motion fields that converge to a desired reference trajectory when a robot is placed away from the desired trajectory, and tracks the trajectory until the end point. To demonstrate the effectiveness of our approach, we show evaluations of KoopMotion on the LASA human handwriting dataset and a 3D manipulator end-effector trajectory dataset, including spectral analysis. We also perform experiments on a physical robot, verifying KoopMotion on a miniature autonomous surface vehicle operating in a non-static fluid flow environment. Our approach is highly sample efficient in both space and time, requiring only 3\% of the LASA dataset to generate dense motion plans. Additionally, KoopMotion provides a significant improvement over baselines when comparing metrics that measure spatial and temporal dynamics modeling efficacy.
Robotic Monitoring of Colorimetric Leaf Sensors for Precision Agriculture
May 20, 2025Current remote sensing technologies that measure crop health e.g. RGB, multispectral, hyperspectral, and LiDAR, are indirect, and cannot capture plant stress indicators directly. Instead, low-cost leaf sensors that directly interface with the crop surface present an opportunity to advance real-time direct monitoring. To this end, we co-design a sensor-detector system, where the sensor is a novel colorimetric leaf sensor that directly measures crop health in a precision agriculture setting, and the detector autonomously obtains optical signals from these leaf sensors. This system integrates a ground robot platform with an on-board monocular RGB camera and object detector to localize the leaf sensor, and a hyperspectral camera with motorized mirror and an on-board halogen light to acquire a hyperspectral reflectance image of the leaf sensor, from which a spectral response characterizing crop health can be extracted. We show a successful demonstration of our co-designed system operating in outdoor environments, obtaining spectra that are interpretable when compared to controlled laboratory-grade spectrometer measurements. The system is demonstrated in row-crop environments both indoors and outdoors where it is able to autonomously navigate, locate and obtain a hyperspectral image of all leaf sensors present, and retrieve interpretable spectral resonance from leaf sensors.
EnKode: Active Learning of Unknown Flows with Koopman Operators
Oct 22, 2024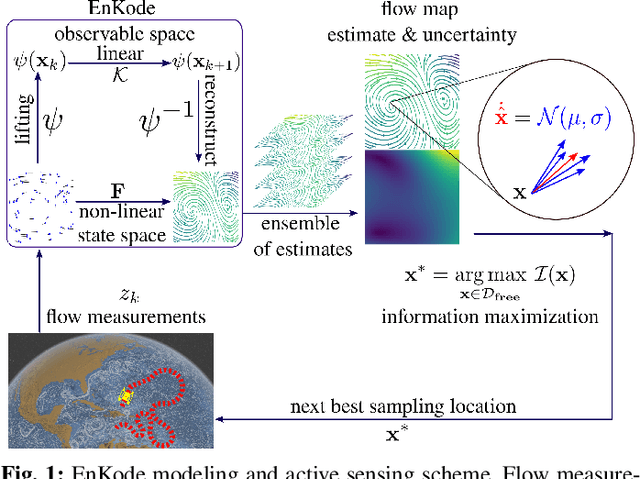
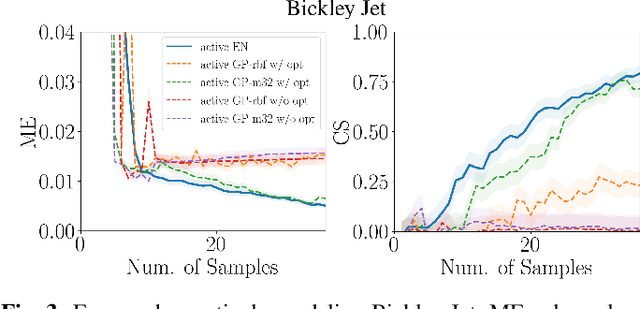
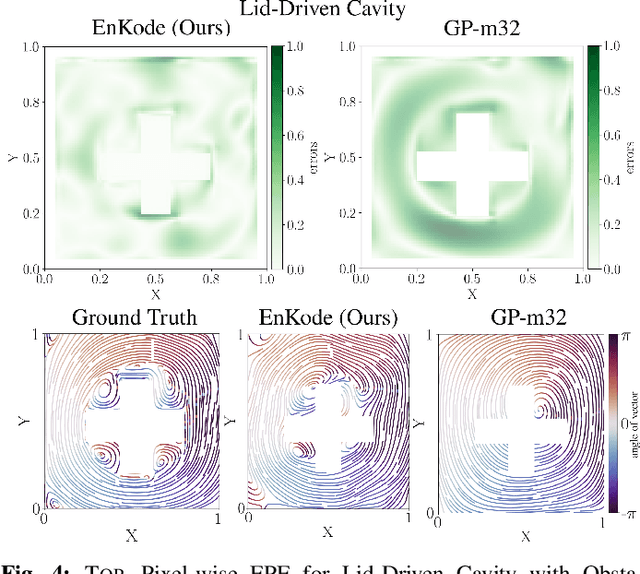
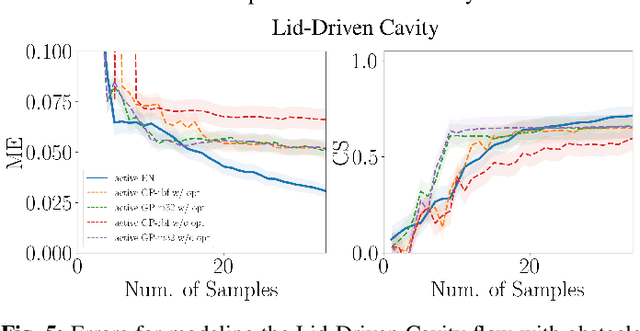
In this letter, we address the task of adaptive sampling to model vector fields. When modeling environmental phenomena with a robot, gathering high resolution information can be resource intensive. Actively gathering data and modeling flows with the data is a more efficient alternative. However, in such scenarios, data is often sparse and thus requires flow modeling techniques that are effective at capturing the relevant dynamical features of the flow to ensure high prediction accuracy of the resulting models. To accomplish this effectively, regions with high informative value must be identified. We propose EnKode, an active sampling approach based on Koopman Operator theory and ensemble methods that can build high quality flow models and effectively estimate model uncertainty. For modeling complex flows, EnKode provides comparable or better estimates of unsampled flow regions than Gaussian Process Regression models with hyperparameter optimization. Additionally, our active sensing scheme provides more accurate flow estimates than comparable strategies that rely on uniform sampling. We evaluate EnKode using three common benchmarking systems: the Bickley Jet, Lid-Driven Cavity flow with an obstacle, and real ocean currents from the National Oceanic and Atmospheric Administration (NOAA).
Online Estimation of the Koopman Operator Using Fourier Features
Dec 03, 2022Transfer operators offer linear representations and global, physically meaningful features of nonlinear dynamical systems. Discovering transfer operators, such as the Koopman operator, require careful crafted dictionaries of observables, acting on states of the dynamical system. This is ad hoc and requires the full dataset for evaluation. In this paper, we offer an optimization scheme to allow joint learning of the observables and Koopman operator with online data. Our results show we are able to reconstruct the evolution and represent the global features of complex dynamical systems.