 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnKode: Active Learning of Unknown Flows with Koopman Operators
Paper and Code
Oct 22, 2024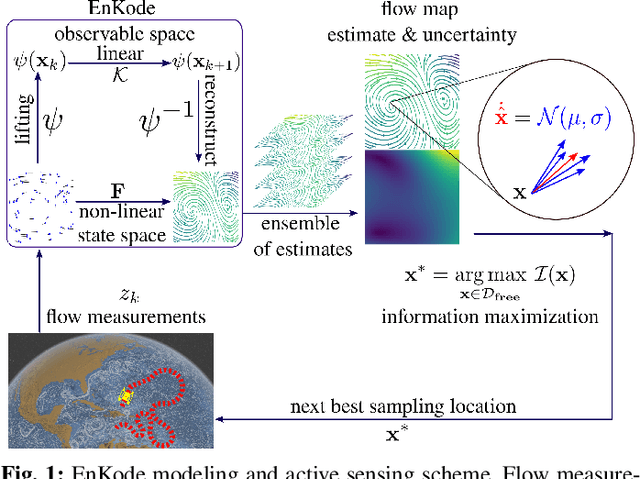
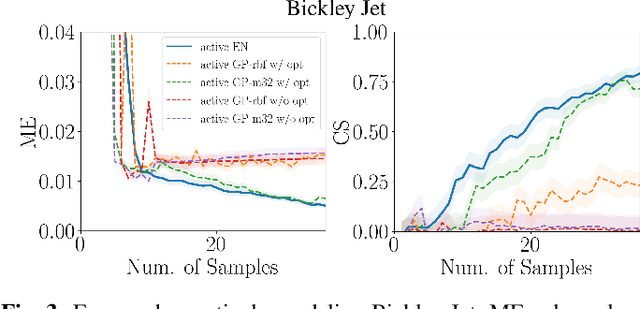
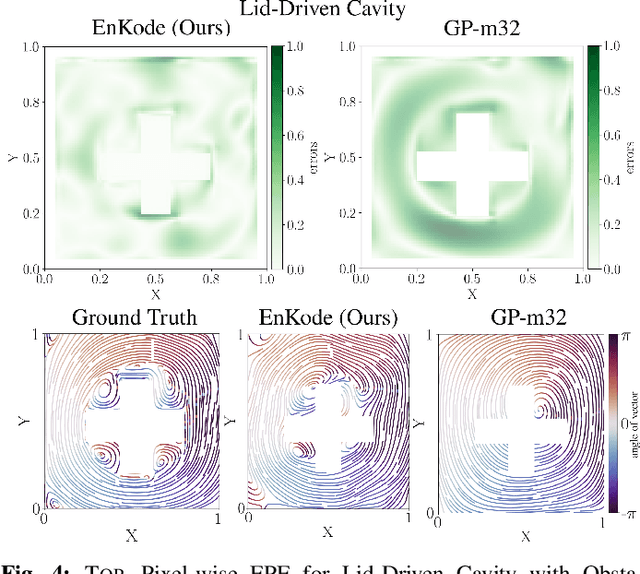
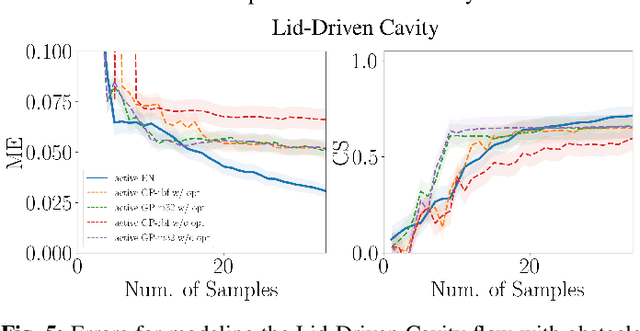
In this letter, we address the task of adaptive sampling to model vector fields. When modeling environmental phenomena with a robot, gathering high resolution information can be resource intensive. Actively gathering data and modeling flows with the data is a more efficient alternative. However, in such scenarios, data is often sparse and thus requires flow modeling techniques that are effective at capturing the relevant dynamical features of the flow to ensure high prediction accuracy of the resulting models. To accomplish this effectively, regions with high informative value must be identified. We propose EnKode, an active sampling approach based on Koopman Operator theory and ensemble methods that can build high quality flow models and effectively estimate model uncertainty. For modeling complex flows, EnKode provides comparable or better estimates of unsampled flow regions than Gaussian Process Regression models with hyperparameter optimization. Additionally, our active sensing scheme provides more accurate flow estimates than comparable strategies that rely on uniform sampling. We evaluate EnKode using three common benchmarking systems: the Bickley Jet, Lid-Driven Cavity flow with an obstacle, and real ocean currents from the National Oceanic and Atmospheric Administration (NOAA).