 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Estimation of the Koopman Operator Using Fourier Features
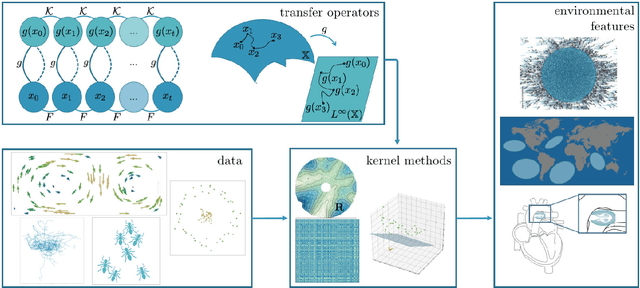
Dec 03, 2022Transfer operators offer linear representations and global, physically meaningful features of nonlinear dynamical systems. Discovering transfer operators, such as the Koopman operator, require careful crafted dictionaries of observables, acting on states of the dynamical system. This is ad hoc and requires the full dataset for evaluation. In this paper, we offer an optimization scheme to allow joint learning of the observables and Koopman operator with online data. Our results show we are able to reconstruct the evolution and represent the global features of complex dynamical systems.
Learning and Leveraging Environmental Features to Improve Robot Awareness
Sep 13, 2021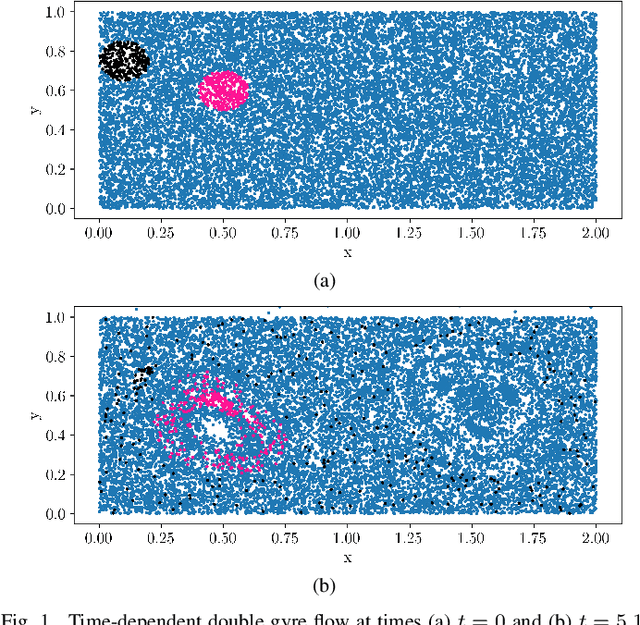
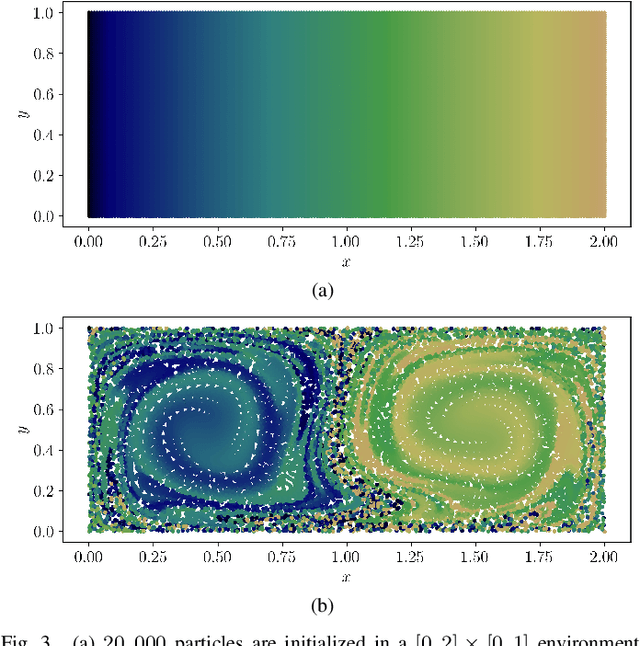
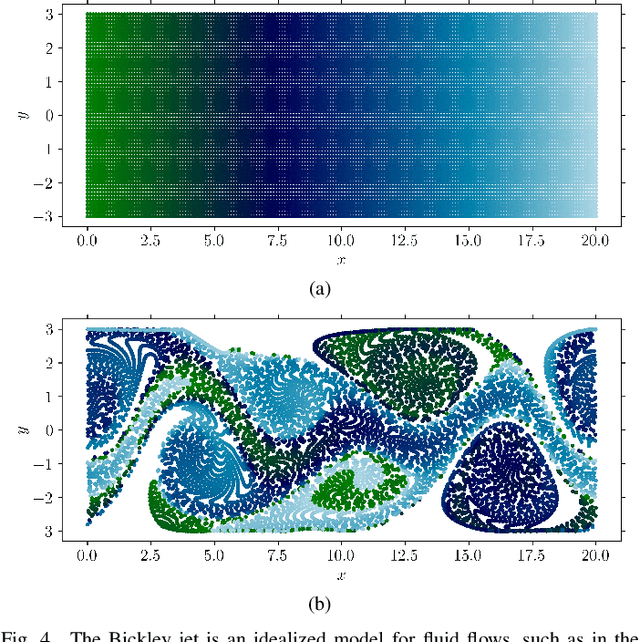
This paper studies how global dynamics can inform path planning and decision-making for robots. Specifically, we investigate how coherent sets, an environmental feature found in flow-like environments, informs robot awareness within these scenarios. We compute coherent sets online with techniques from machine learning, and design a framework for robot behavior that uses coherent sets. We demonstrate the effectiveness of online methods over offline methods. Notably, we apply these online methods for robot monitoring of urban environments and robot navigation through water. Environmental features such as coherent sets provide rich context to robots for smarter, more efficient behavior.
Heterogeneous robot teams for modeling and prediction of multiscale environmental processes
Mar 18, 2021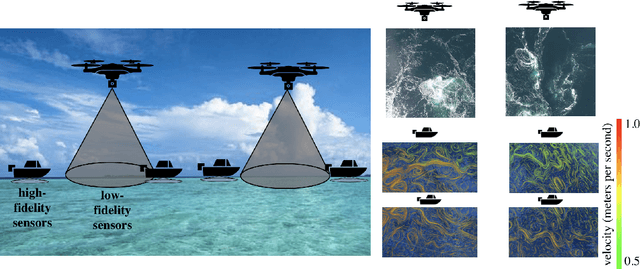
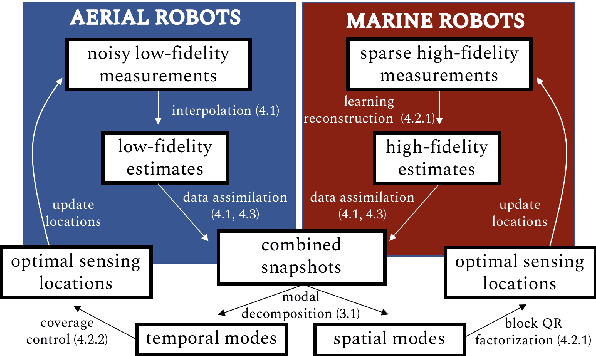
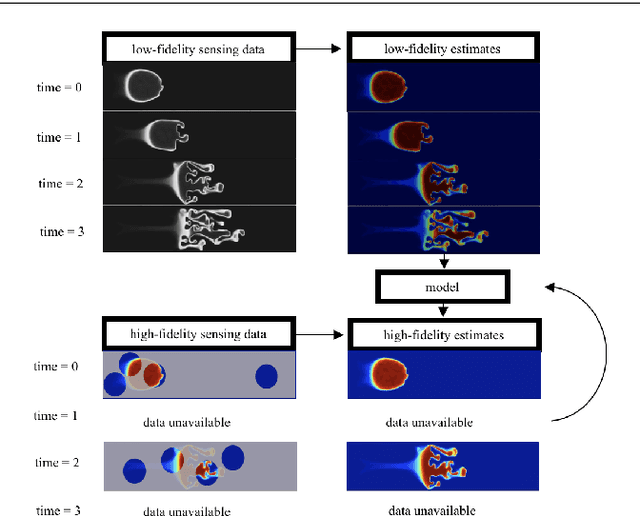
This paper presents a framework to enable a team of heterogeneous mobile robots to model and sense a multiscale system. We propose a coupled strategy, where robots of one type collect high-fidelity measurements at a slow time scale and robots of another type collect low-fidelity measurements at a fast time scale, for the purpose of fusing measurements together. The multiscale measurements are fused to create a model of a complex, nonlinear spatiotemporal process. The model helps determine optimal sensing locations and predict the evolution of the process. Key contributions are: i) consolidation of multiple types of data into one cohesive model, ii) fast determination of optimal sensing locations for mobile robots, and iii) adaptation of models online for various monitoring scenarios. We illustrate the proposed framework by modeling and predicting the evolution of an artificial plasma cloud. We test our approach using physical marine robots adaptively sampling a process in a water tank.