Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning and Leveraging Environmental Features to Improve Robot Awareness
Paper and Code
Sep 13, 2021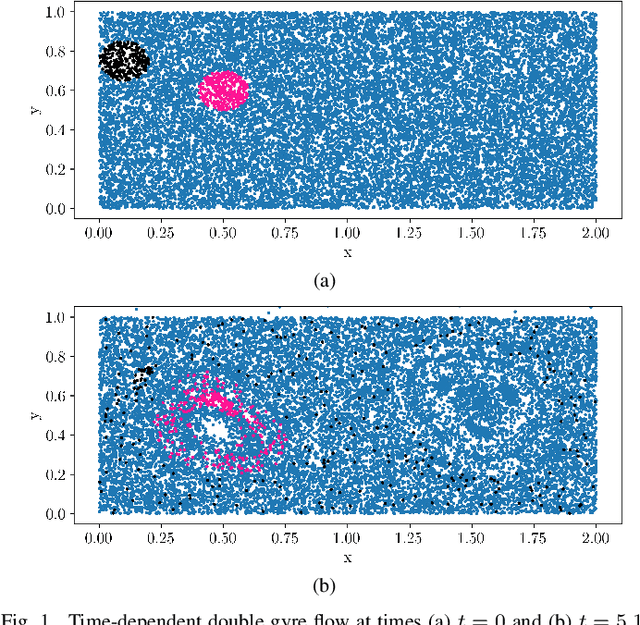
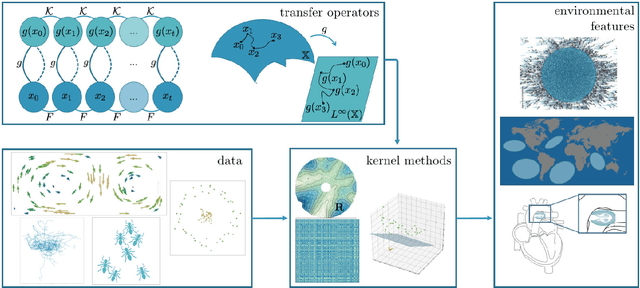
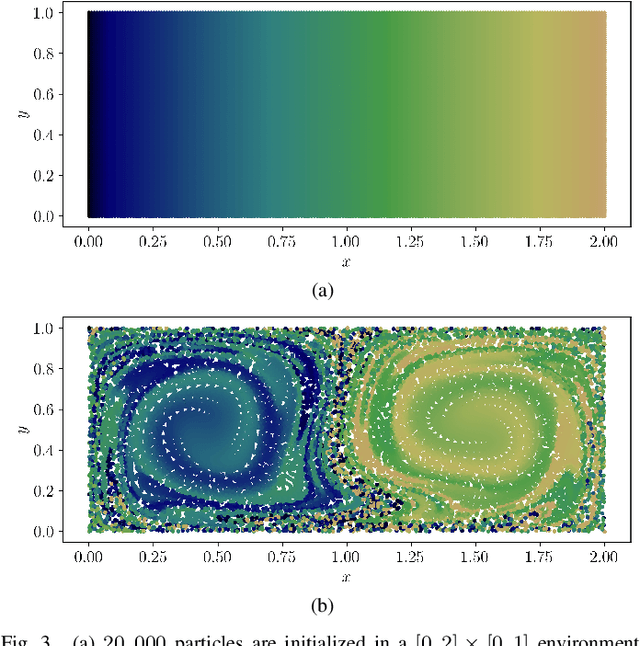
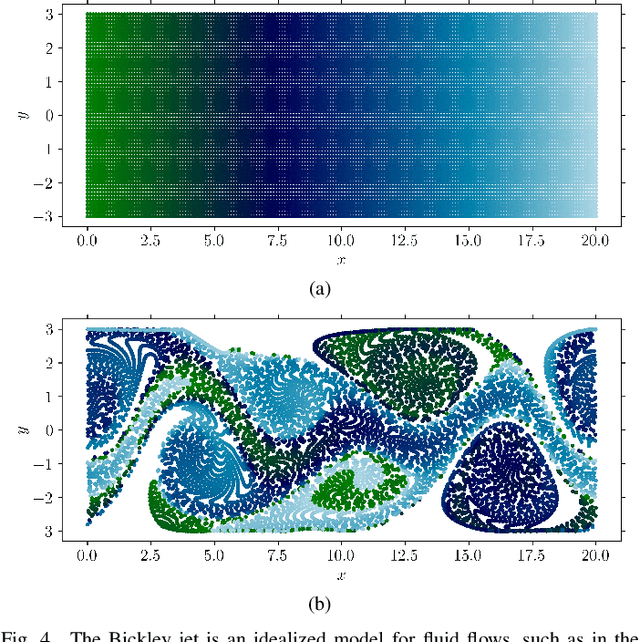
This paper studies how global dynamics can inform path planning and decision-making for robots. Specifically, we investigate how coherent sets, an environmental feature found in flow-like environments, informs robot awareness within these scenarios. We compute coherent sets online with techniques from machine learning, and design a framework for robot behavior that uses coherent sets. We demonstrate the effectiveness of online methods over offline methods. Notably, we apply these online methods for robot monitoring of urban environments and robot navigation through water. Environmental features such as coherent sets provide rich context to robots for smarter, more efficient behavior.
* 8 pages, 8 figures. This work has been submitted to the IEEE for
possible publication. Copyright may be transferred without notice, after
which this version may no longer be accessible
View paper on