 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSPINE: Online Semantic Planning for Missions with Incomplete Natural Language Specifications in Unstructured Environments
Oct 03, 2024



As robots become increasingly capable, users will want to describe high-level missions and have robots fill in the gaps. In many realistic settings, pre-built maps are difficult to obtain, so execution requires exploration and mapping that are necessary and specific to the mission. Consider an emergency response scenario where a user commands a robot, "triage impacted regions." The robot must infer relevant semantics (victims, etc.) and exploration targets (damaged regions) based on priors or other context, then explore and refine its plan online. These missions are incompletely specified, meaning they imply subtasks and semantics. While many semantic planning methods operate online, they are typically designed for well specified tasks such as object search or exploration. Recently, Large Language Models (LLMs) have demonstrated powerful contextual reasoning over a range of robotic tasks described in natural language. However, existing LLM planners typically do not consider online planning or complex missions; rather, relevant subtasks are provided by a pre-built map or a user. We address these limitations via SPINE (online Semantic Planner for missions with Incomplete Natural language specifications in unstructured Environments). SPINE uses an LLM to reason about subtasks implied by the mission then realizes these subtasks in a receding horizon framework. Tasks are automatically validated for safety and refined online with new observations. We evaluate SPINE in simulation and real-world settings. Evaluation missions require multiple steps of semantic reasoning and exploration in cluttered outdoor environments of over 20,000m$^2$ area. We evaluate SPINE against competitive baselines in single-agent and air-ground teaming applications. Please find videos and software on our project page: https://zacravichandran.github.io/SPINE
Graph Neural Networks for Multi-Robot Active Information Acquisition
Sep 24, 2022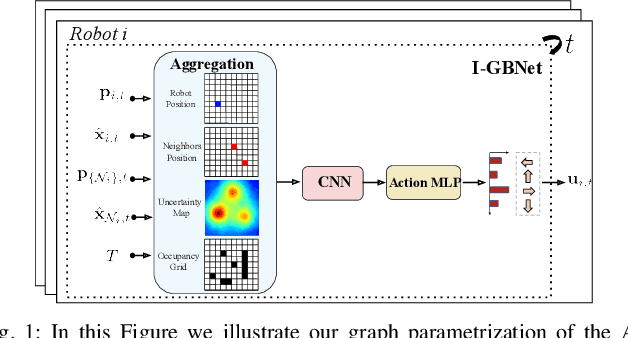
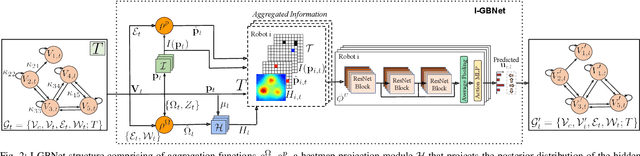
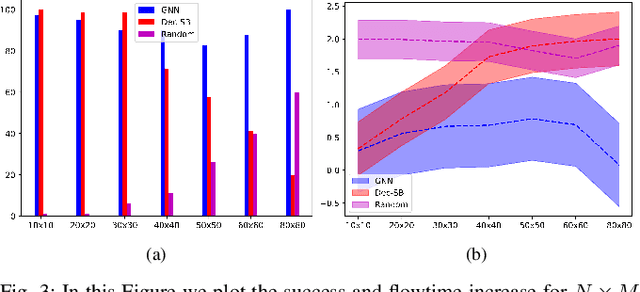
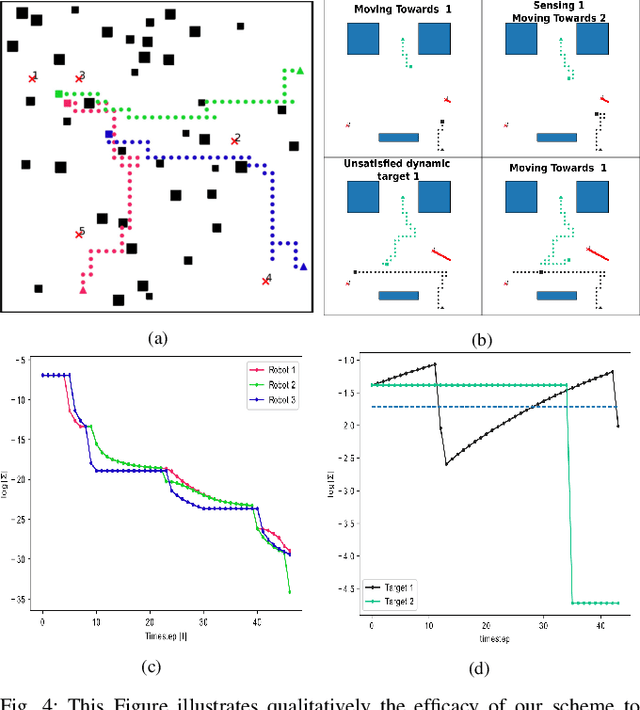
This paper addresses the Multi-Robot Active Information Acquisition (AIA) problem, where a team of mobile robots, communicating through an underlying graph, estimates a hidden state expressing a phenomenon of interest. Applications like target tracking, coverage and SLAM can be expressed in this framework. Existing approaches, though, are either not scalable, unable to handle dynamic phenomena or not robust to changes in the communication graph. To counter these shortcomings, we propose an Information-aware Graph Block Network (I-GBNet), an AIA adaptation of Graph Neural Networks, that aggregates information over the graph representation and provides sequential-decision making in a distributed manner. The I-GBNet, trained via imitation learning with a centralized sampling-based expert solver, exhibits permutation equivariance and time invariance, while harnessing the superior scalability, robustness and generalizability to previously unseen environments and robot configurations. Experiments on significantly larger graphs and dimensionality of the hidden state and more complex environments than those seen in training validate the properties of the proposed architecture and its efficacy in the application of localization and tracking of dynamic targets.
Reactive Informative Planning for Mobile Manipulation Tasks under Sensing and Environmental Uncertainty
May 12, 2022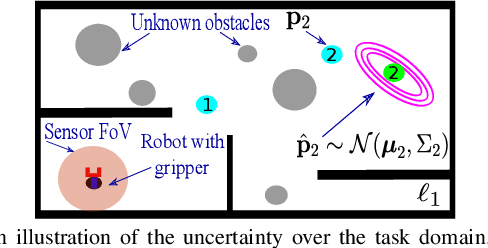
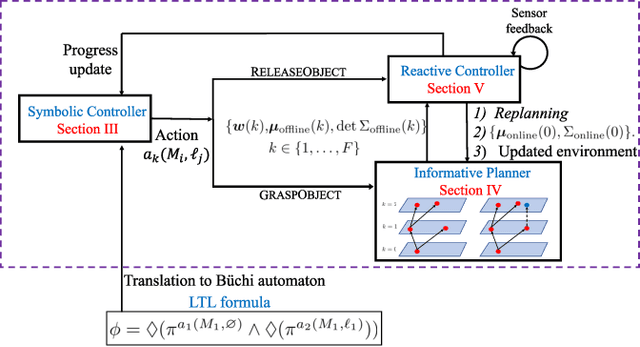
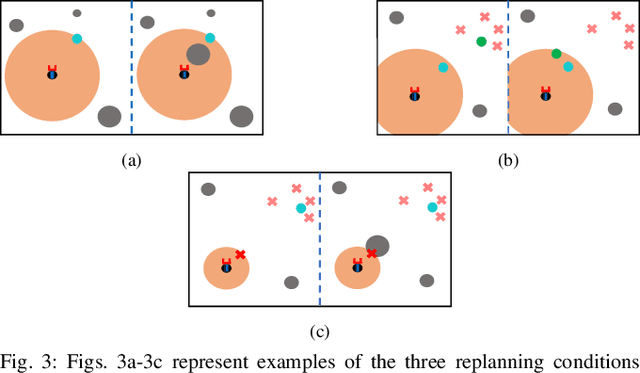
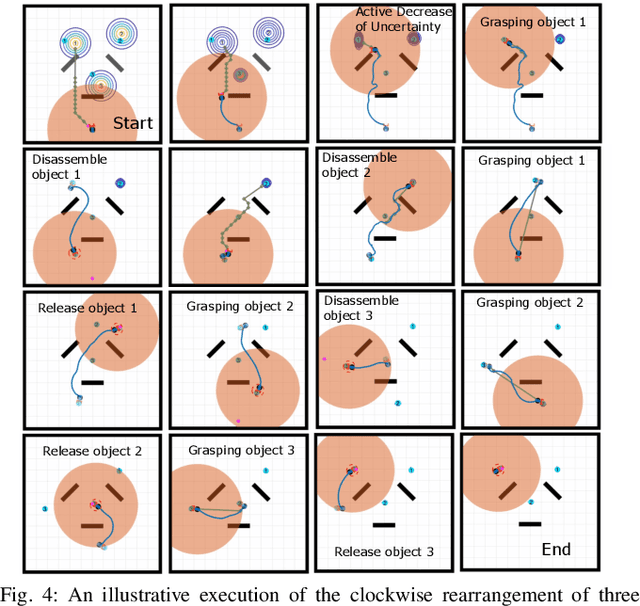
In this paper we address mobile manipulation planning problems in the presence of sensing and environmental uncertainty. In particular, we consider mobile sensing manipulators operating in environments with unknown geometry and uncertain movable objects, while being responsible for accomplishing tasks requiring grasping and releasing objects in a logical fashion. Existing algorithms either do not scale well or neglect sensing and/or environmental uncertainty. To face these challenges, we propose a hybrid control architecture, where a symbolic controller generates high-level manipulation commands (e.g., grasp an object) based on environmental feedback, an informative planner designs paths to actively decrease the uncertainty of objects of interest, and a continuous reactive controller tracks the sparse waypoints comprising the informative paths while avoiding a priori unknown obstacles. The overall architecture can handle environmental and sensing uncertainty online, as the robot explores its workspace. Using numerical simulations, we show that the proposed architecture can handle tasks of increased complexity while responding to unanticipated adverse configurations.
Technical Report: Distributed Sampling-based Planning for Non-Myopic Active Information Gathering
Jul 23, 2021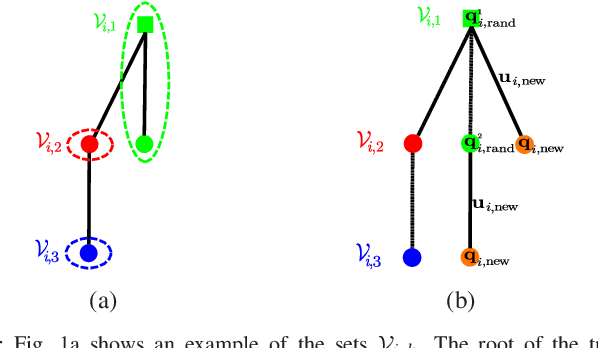
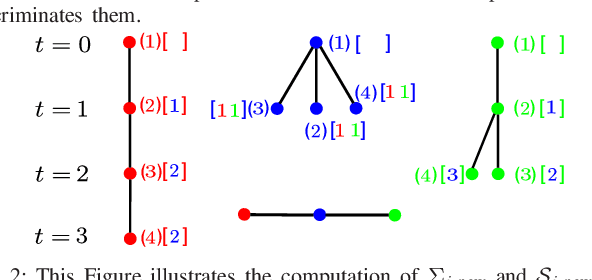
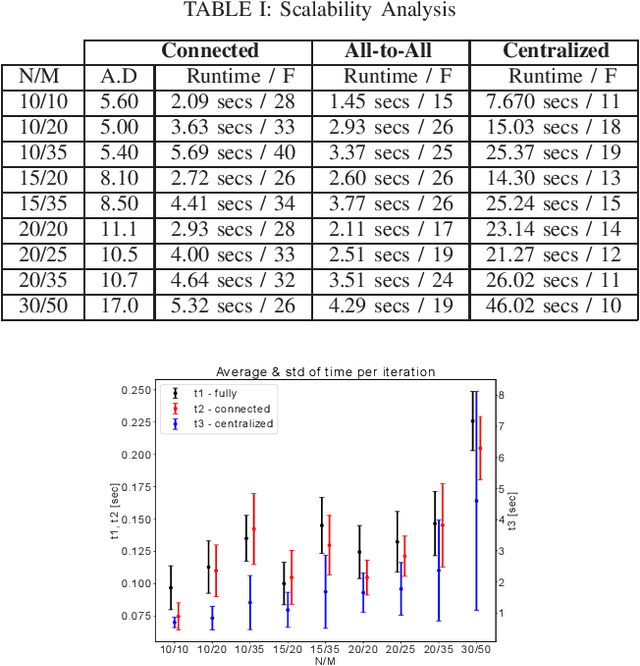
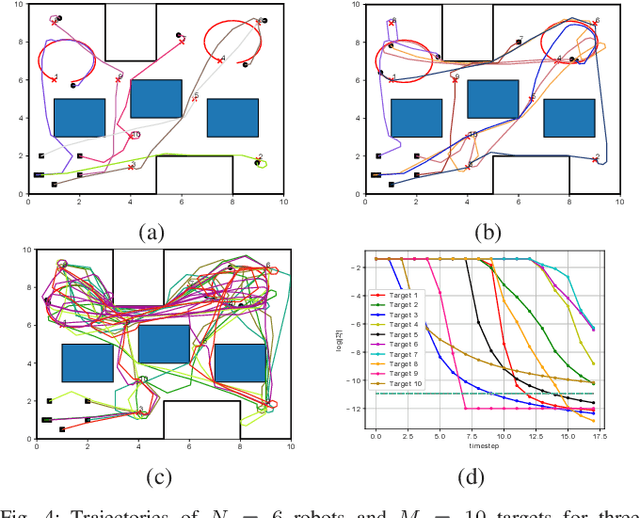
This paper addresses the problem of active information gathering for multi-robot systems. Specifically, we consider scenarios where robots are tasked with reducing uncertainty of dynamical hidden states evolving in complex environments. The majority of existing information gathering approaches are centralized and, therefore, they cannot be applied to distributed robot teams where communication to a central user is not available. To address this challenge, we propose a novel distributed sampling-based planning algorithm that can significantly increase robot and target scalability while decreasing computational cost. In our non-myopic approach, all robots build in parallel local trees exploring the information space and their corresponding motion space. As the robots construct their respective local trees, they communicate with their neighbors to exchange and aggregate their local beliefs about the hidden state through a distributed Kalman filter. We show that the proposed algorithm is probabilistically complete and asymptotically optimal. We provide extensive simulation results that demonstrate the scalability of the proposed algorithm and that it can address large-scale, multi-robot information gathering tasks, that are computationally challenging for centralized methods.