 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHIO-SDF: Hierarchical Incremental Online Signed Distance Fields
Oct 14, 2023



A good representation of a large, complex mobile robot workspace must be space-efficient yet capable of encoding relevant geometric details. When exploring unknown environments, it needs to be updatable incrementally in an online fashion. We introduce HIO-SDF, a new method that represents the environment as a Signed Distance Field (SDF). State of the art representations of SDFs are based on either neural networks or voxel grids. Neural networks are capable of representing the SDF continuously. However, they are hard to update incrementally as neural networks tend to forget previously observed parts of the environment unless an extensive sensor history is stored for training. Voxel-based representations do not have this problem but they are not space-efficient especially in large environments with fine details. HIO-SDF combines the advantages of these representations using a hierarchical approach which employs a coarse voxel grid that captures the observed parts of the environment together with high-resolution local information to train a neural network. HIO-SDF achieves a 46% lower mean global SDF error across all test scenes than a state of the art continuous representation, and a 30% lower error than a discrete representation at the same resolution as our coarse global SDF grid.
RAMP: Hierarchical Reactive Motion Planning for Manipulation Tasks Using Implicit Signed Distance Functions
May 17, 2023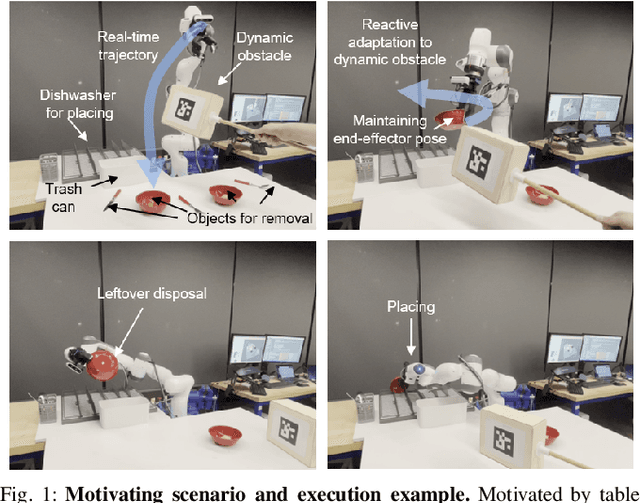
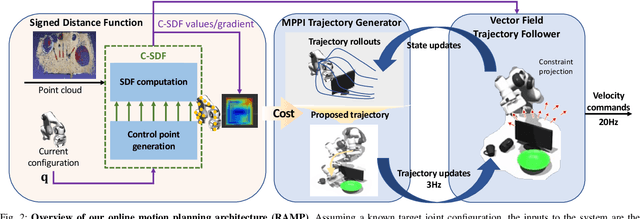
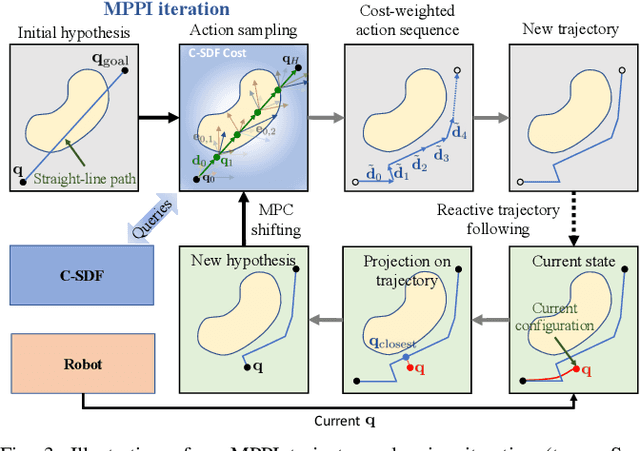
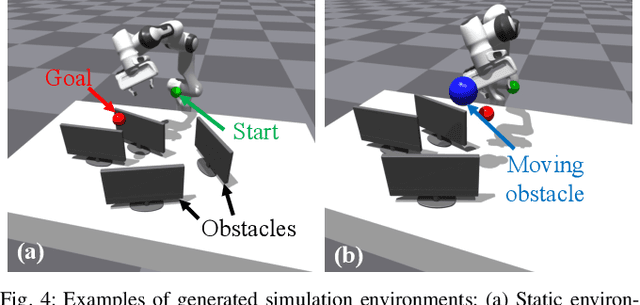
We introduce Reactive Action and Motion Planner (RAMP), which combines the strengths of search-based and reactive approaches for motion planning. In essence, RAMP is a hierarchical approach where a novel variant of a Model Predictive Path Integral (MPPI) controller is used to generate trajectories which are then followed asynchronously by a local vector field controller. We demonstrate, in the context of a table clearing application, that RAMP can rapidly find paths in the robot's configuration space, satisfy task and robot-specific constraints, and provide safety by reacting to static or dynamically moving obstacles. RAMP achieves superior performance through a number of key innovations: we use Signed Distance Function (SDF) representations directly from the robot configuration space, both for collision checking and reactive control. The use of SDFs allows for a smoother definition of collision cost when planning for a trajectory, and is critical in ensuring safety while following trajectories. In addition, we introduce a novel variant of MPPI which, combined with the safety guarantees of the vector field trajectory follower, performs incremental real-time global trajectory planning. Simulation results establish that our method can generate paths that are comparable to traditional and state-of-the-art approaches in terms of total trajectory length while being up to 30 times faster. Real-world experiments demonstrate the safety and effectiveness of our approach in challenging table clearing scenarios.
Reactive Informative Planning for Mobile Manipulation Tasks under Sensing and Environmental Uncertainty
May 12, 2022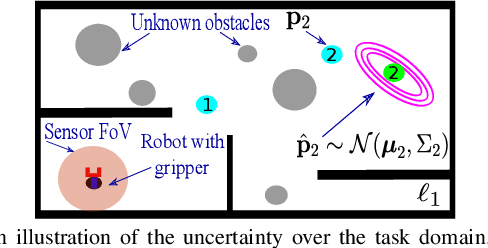
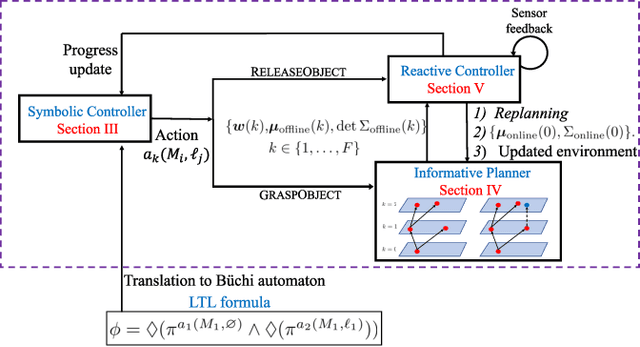
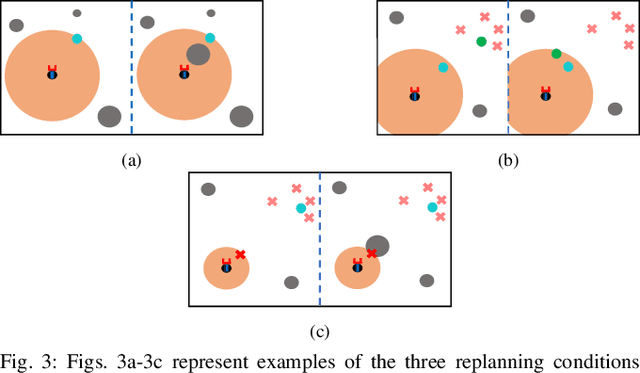
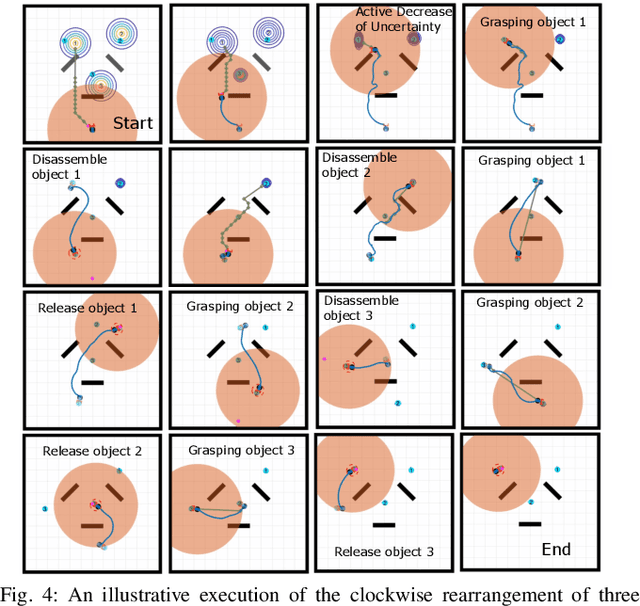
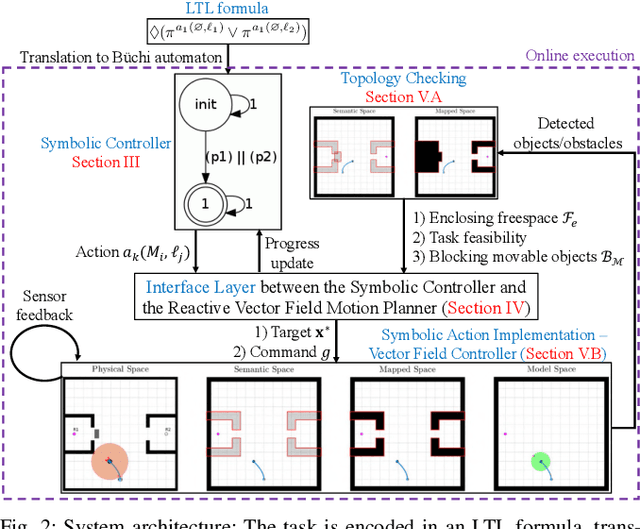
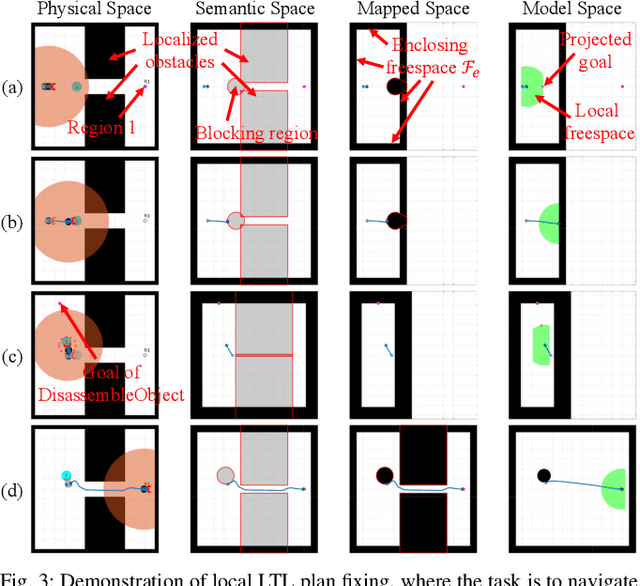
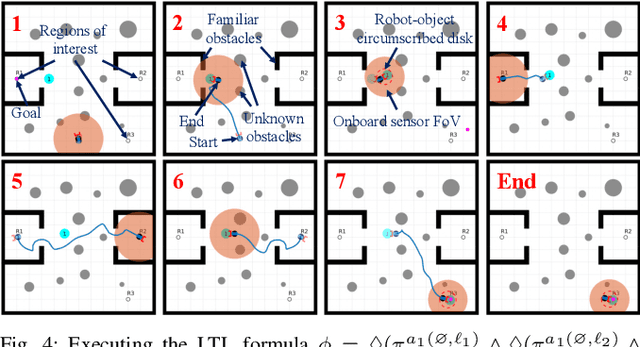
In this paper we address mobile manipulation planning problems in the presence of sensing and environmental uncertainty. In particular, we consider mobile sensing manipulators operating in environments with unknown geometry and uncertain movable objects, while being responsible for accomplishing tasks requiring grasping and releasing objects in a logical fashion. Existing algorithms either do not scale well or neglect sensing and/or environmental uncertainty. To face these challenges, we propose a hybrid control architecture, where a symbolic controller generates high-level manipulation commands (e.g., grasp an object) based on environmental feedback, an informative planner designs paths to actively decrease the uncertainty of objects of interest, and a continuous reactive controller tracks the sparse waypoints comprising the informative paths while avoiding a priori unknown obstacles. The overall architecture can handle environmental and sensing uncertainty online, as the robot explores its workspace. Using numerical simulations, we show that the proposed architecture can handle tasks of increased complexity while responding to unanticipated adverse configurations.
Technical Report: A Hierarchical Deliberative-Reactive System Architecture for Task and Motion Planning in Partially Known Environments
Feb 03, 2022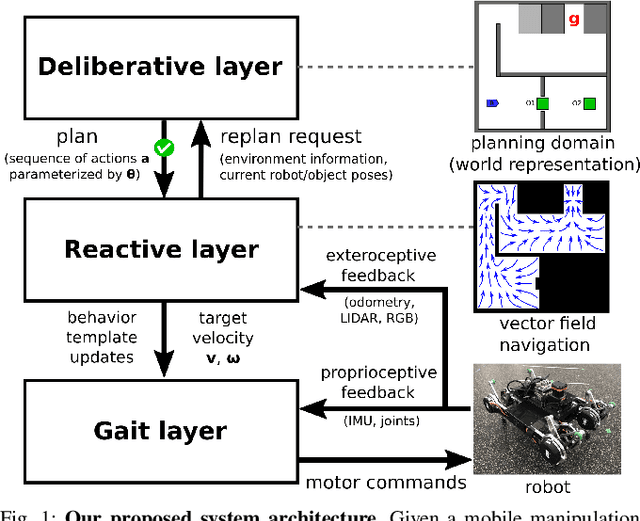
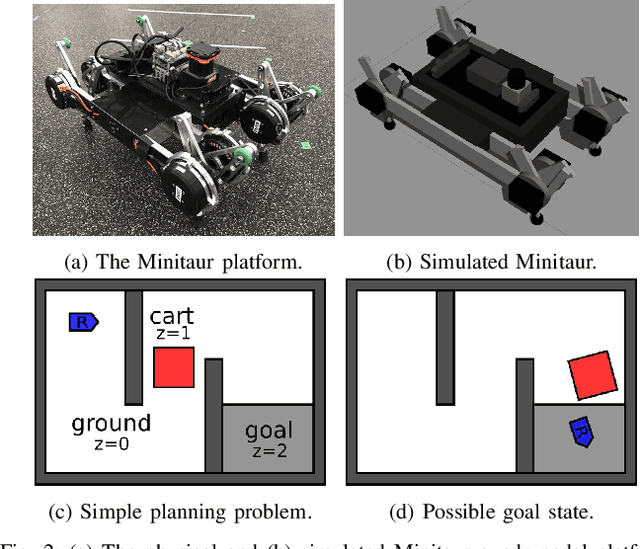
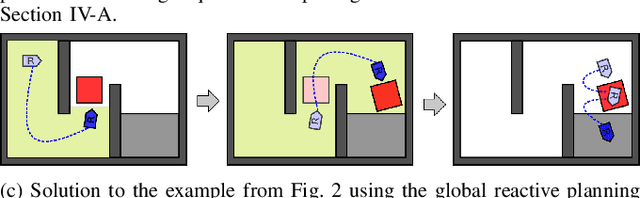
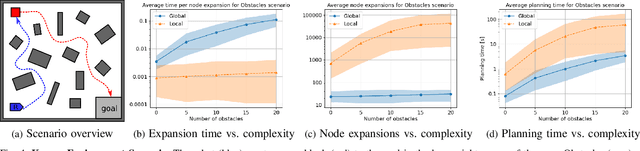
We describe a task and motion planning architecture for highly dynamic systems that combines a domain-independent sampling-based deliberative planning algorithm with a global reactive planner. We leverage the recent development of a reactive, vector field planner that provides guarantees of reachability to large regions of the environment even in the face of unknown or unforeseen obstacles. The reachability guarantees can be formalized using contracts that allow a deliberative planner to reason purely in terms of those contracts and synthesize a plan by choosing a sequence of reactive behaviors and their target configurations, without evaluating specific motion plans between targets. This reduces both the search depth at which plans will be found, and the number of samples required to ensure a plan exists, while crucially preserving correctness guarantees. The result is reduced computational cost of synthesizing plans, and increased robustness of generated plans to actuator noise, model misspecification, or unknown obstacles. Simulation studies show that our hierarchical planning and execution architecture can solve complex navigation and rearrangement tasks, even when faced with narrow passageways or incomplete world information.
Technical Report: Reactive Planning for Mobile Manipulation Tasks in Unexplored Semantic Environments
Nov 01, 2020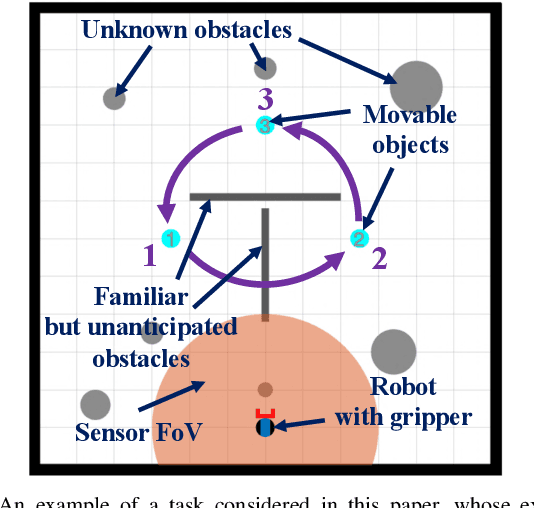
Complex manipulation tasks, such as rearrangement planning of numerous objects, are combinatorially hard problems. Existing algorithms either do not scale well or assume a great deal of prior knowledge about the environment, and few offer any rigorous guarantees. In this paper, we propose a novel hybrid control architecture for achieving such tasks with mobile manipulators. On the discrete side, we enrich a temporal logic specification with mobile manipulation primitives such as moving to a point, and grasping or moving an object. Such specifications are translated to an automaton representation, which orchestrates the physical grounding of the task to mobility or manipulation controllers. The grounding from the discrete to the continuous reactive controller is online and can respond to the discovery of unknown obstacles or decide to push out of the way movable objects that prohibit task accomplishment. Despite the problem complexity, we prove that, under specific conditions, our architecture enjoys provable completeness on the discrete side, provable termination on the continuous side, and avoids all obstacles in the environment. Simulations illustrate the efficiency of our architecture that can handle tasks of increased complexity while also responding to unknown obstacles or unanticipated adverse configurations.
Technical Report: Reactive Semantic Planning in Unexplored Semantic Environments Using Deep Perceptual Feedback
Feb 28, 2020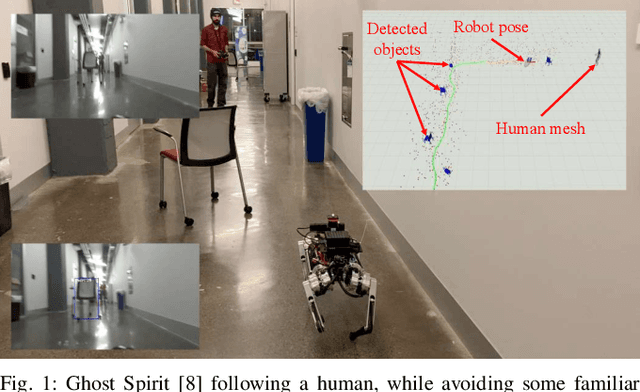


This paper presents a reactive planning system that enriches the topological representation of an environment with a tightly integrated semantic representation, achieved by incorporating and exploiting advances in deep perceptual learning and probabilistic semantic reasoning. Our architecture combines object detection with semantic SLAM, affording robust, reactive logical as well as geometric planning in unexplored environments. Moreover, by incorporating a human mesh estimation algorithm, our system is capable of reacting and responding in real time to semantically labeled human motions and gestures. New formal results allow tracking of suitably non-adversarial moving targets, while maintaining the same collision avoidance guarantees. We suggest the empirical utility of the proposed control architecture with a numerical study including comparisons with a state-of-the-art dynamic replanning algorithm, and physical implementation on both a wheeled and legged platform in different settings with both geometric and semantic goals.
Reactive Navigation in Partially Familiar Planar Environments Using Semantic Perceptual Feedback
Feb 20, 2020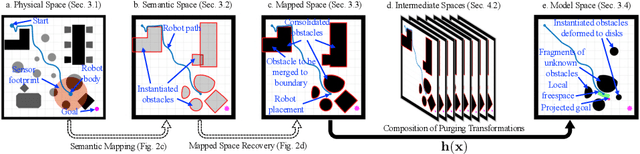
This paper solves the planar navigation problem by recourse to an online reactive scheme that exploits recent advances in SLAM and visual object recognition to recast prior geometric knowledge in terms of an offline catalogue of familiar objects. The resulting vector field planner guarantees convergence to an arbitrarily specified goal, avoiding collisions along the way with fixed but arbitrarily placed instances from the catalogue as well as completely unknown fixed obstacles so long as they are strongly convex and well separated. We illustrate the generic robustness properties of such deterministic reactive planners as well as the relatively modest computational cost of this algorithm by supplementing an extensive numerical study with physical implementation on both a wheeled and legged platform in different settings.
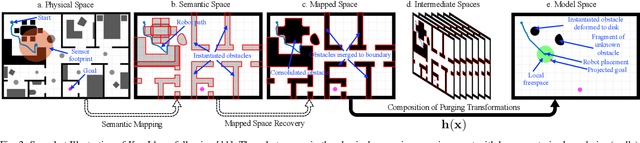
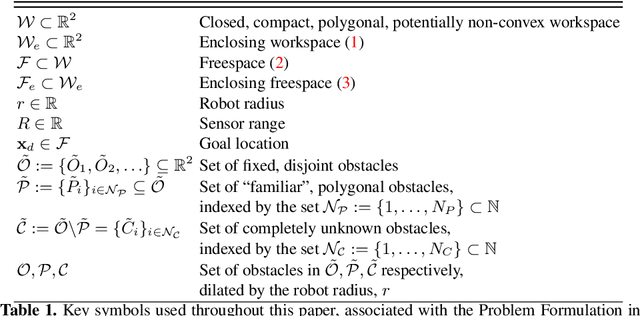
Technical Report: Reactive Navigation in Partially Known Non-Convex Environments
Oct 28, 2018
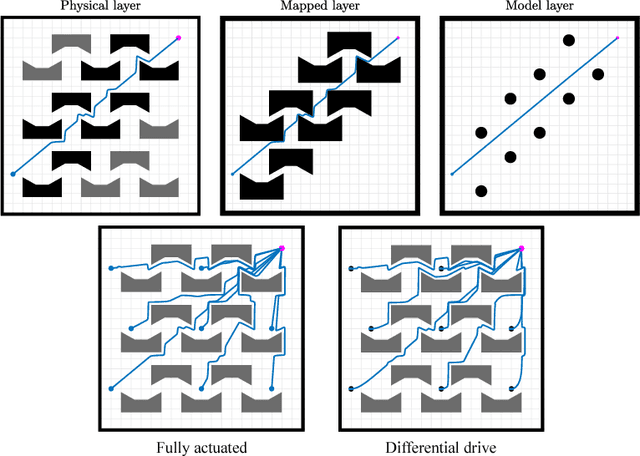
This paper presents a provably correct method for robot navigation in 2D environments cluttered with familiar but unexpected non-convex, star-shaped obstacles as well as completely unknown, convex obstacles. We presuppose a limited range onboard sensor, capable of recognizing, localizing and (leveraging ideas from constructive solid geometry) generating online from its catalogue of the familiar, non-convex shapes an implicit representation of each one. These representations underlie an online change of coordinates to a completely convex model planning space wherein a previously developed online construction yields a provably correct reactive controller that is pulled back to the physically sensed representation to generate the actual robot commands. We extend the construction to differential drive robots, and suggest the empirical utility of the proposed control architecture using both formal proofs and numerical simulations.
Technical Report: Sensor-Based Reactive Symbolic Planning in Partially Known Environments
Feb 13, 2018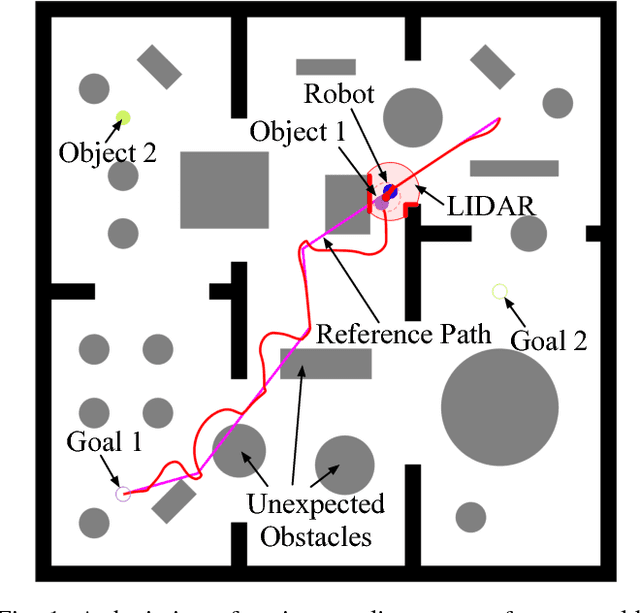
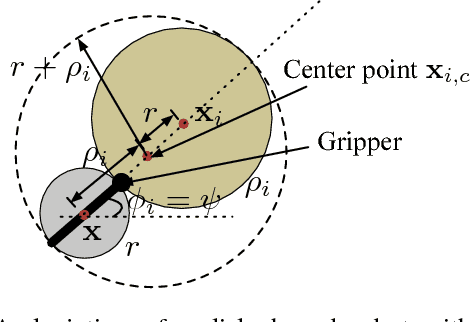
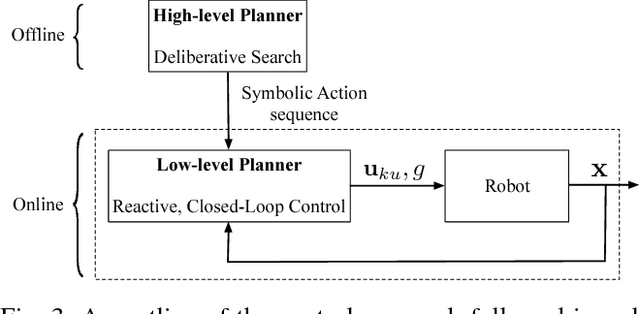
This paper considers the problem of completing assemblies of passive objects in nonconvex environments, cluttered with convex obstacles of unknown position, shape and size that satisfy a specific separation assumption. A differential drive robot equipped with a gripper and a LIDAR sensor, capable of perceiving its environment only locally, is used to position the passive objects in a desired configuration. The method combines the virtues of a deliberative planner generating high-level, symbolic commands, with the formal guarantees of convergence and obstacle avoidance of a reactive planner that requires little onboard computation and is used online. The validity of the proposed method is verified both with formal proofs and numerical simulations.