 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTechnical Report: A Hierarchical Deliberative-Reactive System Architecture for Task and Motion Planning in Partially Known Environments
Feb 03, 2022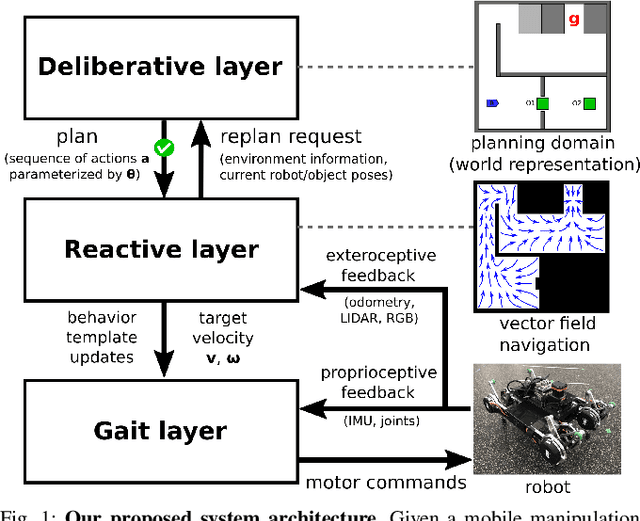
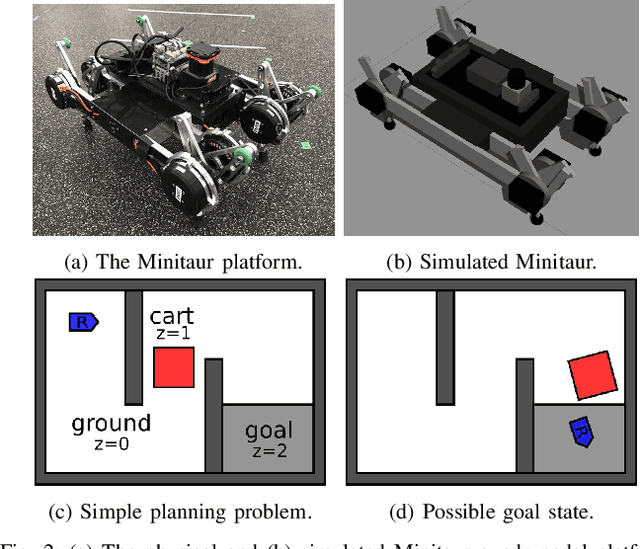
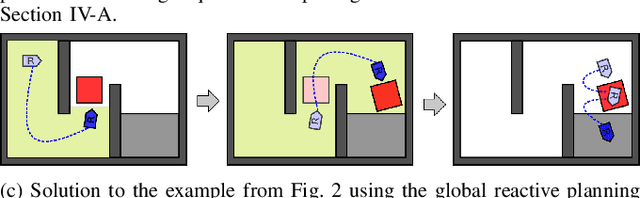
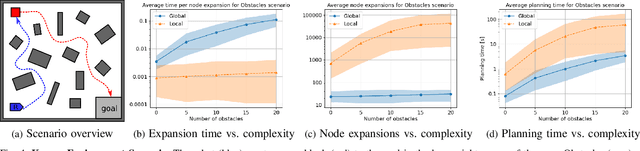
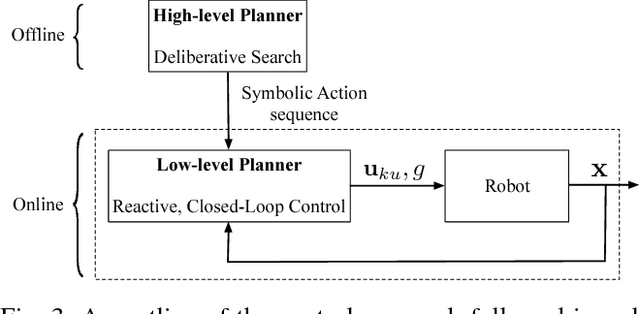
We describe a task and motion planning architecture for highly dynamic systems that combines a domain-independent sampling-based deliberative planning algorithm with a global reactive planner. We leverage the recent development of a reactive, vector field planner that provides guarantees of reachability to large regions of the environment even in the face of unknown or unforeseen obstacles. The reachability guarantees can be formalized using contracts that allow a deliberative planner to reason purely in terms of those contracts and synthesize a plan by choosing a sequence of reactive behaviors and their target configurations, without evaluating specific motion plans between targets. This reduces both the search depth at which plans will be found, and the number of samples required to ensure a plan exists, while crucially preserving correctness guarantees. The result is reduced computational cost of synthesizing plans, and increased robustness of generated plans to actuator noise, model misspecification, or unknown obstacles. Simulation studies show that our hierarchical planning and execution architecture can solve complex navigation and rearrangement tasks, even when faced with narrow passageways or incomplete world information.
Admissible Abstractions for Near-optimal Task and Motion Planning
Jun 03, 2018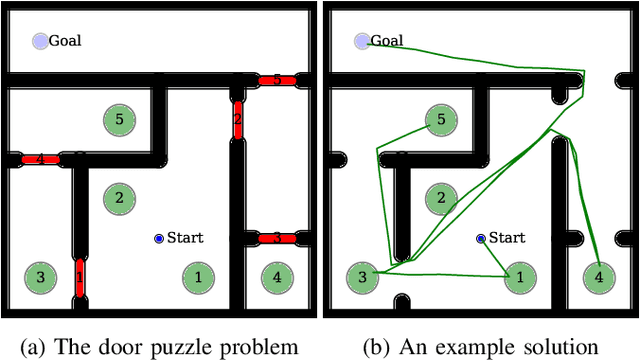

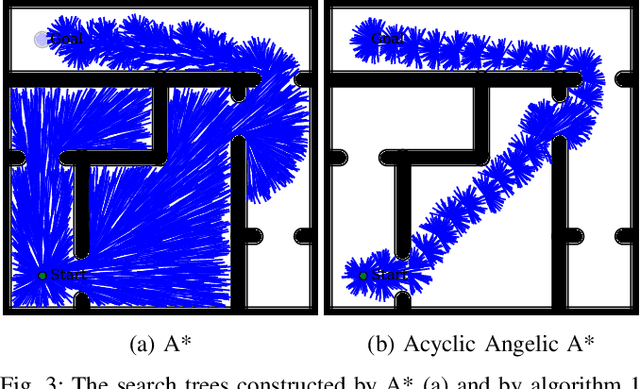

We define an admissibility condition for abstractions expressed using angelic semantics and show that these conditions allow us to accelerate planning while preserving the ability to find the optimal motion plan. We then derive admissible abstractions for two motion planning domains with continuous state. We extract upper and lower bounds on the cost of concrete motion plans using local metric and topological properties of the problem domain. These bounds guide the search for a plan while maintaining performance guarantees. We show that abstraction can dramatically reduce the complexity of search relative to a direct motion planner. Using our abstractions, we find near-optimal motion plans in planning problems involving $10^{13}$ states without using a separate task planner.
Technical Report: Sensor-Based Reactive Symbolic Planning in Partially Known Environments
Feb 13, 2018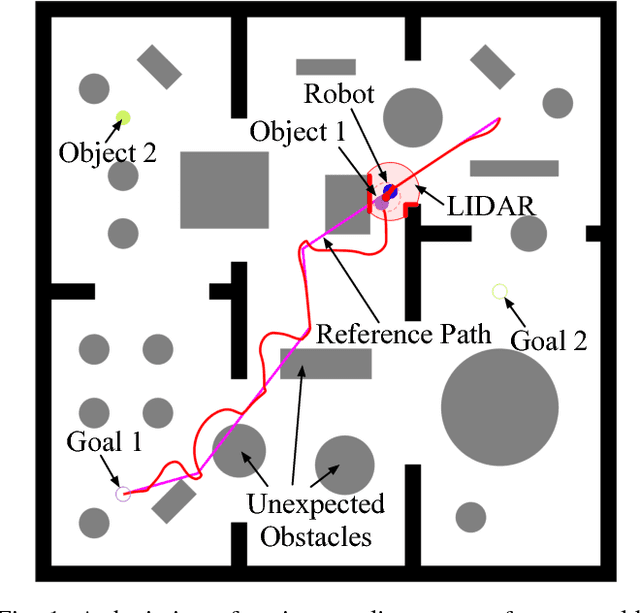
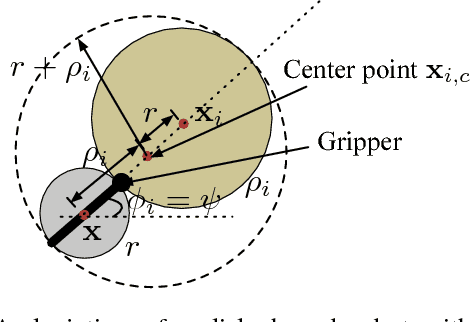
This paper considers the problem of completing assemblies of passive objects in nonconvex environments, cluttered with convex obstacles of unknown position, shape and size that satisfy a specific separation assumption. A differential drive robot equipped with a gripper and a LIDAR sensor, capable of perceiving its environment only locally, is used to position the passive objects in a desired configuration. The method combines the virtues of a deliberative planner generating high-level, symbolic commands, with the formal guarantees of convergence and obstacle avoidance of a reactive planner that requires little onboard computation and is used online. The validity of the proposed method is verified both with formal proofs and numerical simulations.
PROBE-GK: Predictive Robust Estimation using Generalized Kernels
Aug 02, 2017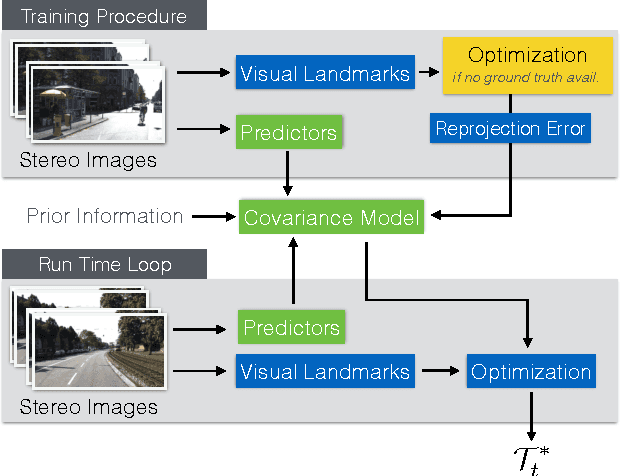
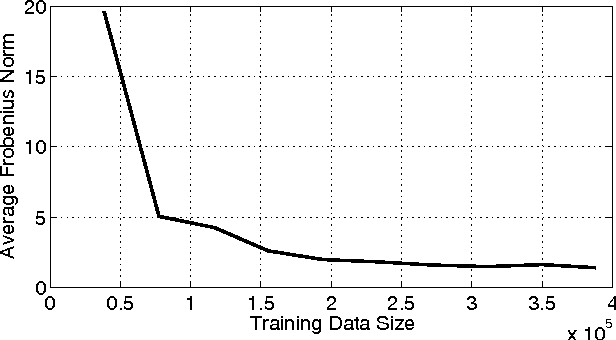
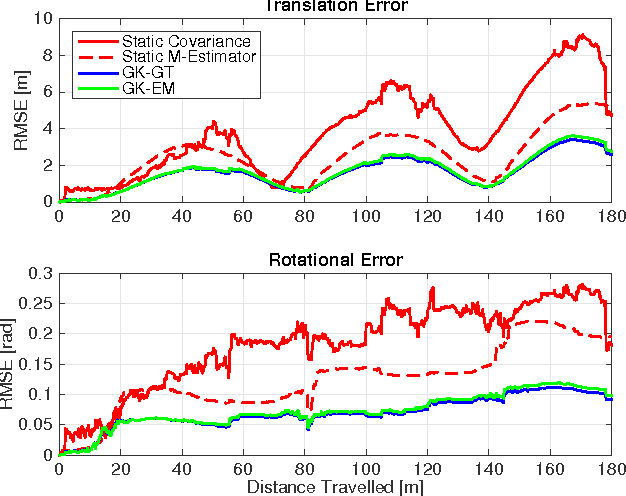

Many algorithms in computer vision and robotics make strong assumptions about uncertainty, and rely on the validity of these assumptions to produce accurate and consistent state estimates. In practice, dynamic environments may degrade sensor performance in predictable ways that cannot be captured with static uncertainty parameters. In this paper, we employ fast nonparametric Bayesian inference techniques to more accurately model sensor uncertainty. By setting a prior on observation uncertainty, we derive a predictive robust estimator, and show how our model can be learned from sample images, both with and without knowledge of the motion used to generate the data. We validate our approach through Monte Carlo simulations, and report significant improvements in localization accuracy relative to a fixed noise model in several settings, including on synthetic data, the KITTI dataset, and our own experimental platform.