 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdmissible Abstractions for Near-optimal Task and Motion Planning
Paper and Code
Jun 03, 2018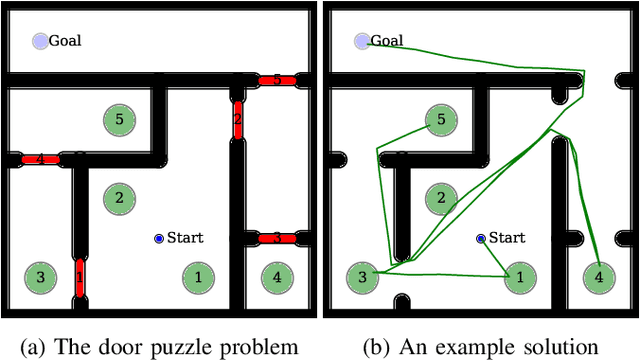

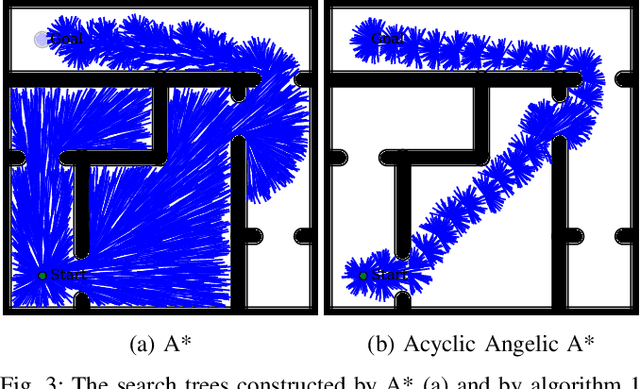

We define an admissibility condition for abstractions expressed using angelic semantics and show that these conditions allow us to accelerate planning while preserving the ability to find the optimal motion plan. We then derive admissible abstractions for two motion planning domains with continuous state. We extract upper and lower bounds on the cost of concrete motion plans using local metric and topological properties of the problem domain. These bounds guide the search for a plan while maintaining performance guarantees. We show that abstraction can dramatically reduce the complexity of search relative to a direct motion planner. Using our abstractions, we find near-optimal motion plans in planning problems involving $10^{13}$ states without using a separate task planner.