 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeridian: Metric-Semantic Primitive Matching for Cross-View Geo-Localization Beyond Urban Environments
Jun 04, 2026Successful robot automation requires accurate global localization to support repeatability, task planning, goal specification, and safe operation. However, reliable localization in GNSS-denied environments remains an open problem. Overhead aerial imagery offers a promising solution, but existing approaches primarily target structured urban environments and have been rarely demonstrated in unstructured natural terrain. Limitations of the state-of-the-art include a reliance on models trained for specific environments, as well as difficulty handling repetitive geometries and featureless landscapes commonly found in natural outdoor areas. To overcome these challenges, we present Meridian, a method for matching high-level metric-semantic primitives across aerial images and ground robot RGB-D camera data that achieves accurate global localization and generalizes well across diverse environments, all without any training or algorithmic fine-tuning on area-specific data. We formulate novel consistency metrics to estimate a distribution over robot submap poses and to reject outlier hypotheses in a robust pose graph optimization step for accurate robot trajectory estimation. We demonstrate that our algorithm can localize a ground robot across a wide variety of environments, including an autonomous driving dataset, a park and campus area, and a wilderness camp, with an average optimized trajectory error of 2.4 m over 19 km of ground traversal.
B-ActiveSEAL: Scalable Uncertainty-Aware Active Exploration with Tightly Coupled Localization-Mapping
Dec 13, 2025Active robot exploration requires decision-making processes that integrate localization and mapping under tightly coupled uncertainty. However, managing these interdependent uncertainties over long-term operations in large-scale environments rapidly becomes computationally intractable. To address this challenge, we propose B-ActiveSEAL, a scalable information-theoretic active exploration framework that explicitly accounts for coupled uncertainties-from perception through mapping-into the decision-making process. Our framework (i) adaptively balances map uncertainty (exploration) and localization uncertainty (exploitation), (ii) accommodates a broad class of generalized entropy measures, enabling flexible and uncertainty-aware active exploration, and (iii) establishes Behavioral entropy (BE) as an effective information measure for active exploration by enabling intuitive and adaptive decision-making under coupled uncertainties. We establish a theoretical foundation for propagating coupled uncertainties and integrating them into general entropy formulations, enabling uncertainty-aware active exploration under tightly coupled localization-mapping. The effectiveness of the proposed approach is validated through rigorous theoretical analysis and extensive experiments on open-source maps and ROS-Unity simulations across diverse and complex environments. The results demonstrate that B-ActiveSEAL achieves a well-balanced exploration-exploitation trade-off and produces diverse, adaptive exploration behaviors across environments, highlighting clear advantages over representative baselines.
Behaviorally Heterogeneous Multi-Agent Exploration Using Distributed Task Allocation
Sep 10, 2025



We study a problem of multi-agent exploration with behaviorally heterogeneous robots. Each robot maps its surroundings using SLAM and identifies a set of areas of interest (AoIs) or frontiers that are the most informative to explore next. The robots assess the utility of going to a frontier using Behavioral Entropy (BE) and then determine which frontier to go to via a distributed task assignment scheme. We convert the task assignment problem into a non-cooperative game and use a distributed algorithm (d-PBRAG) to converge to the Nash equilibrium (which we show is the optimal task allocation solution). For unknown utility cases, we provide robust bounds using approximate rewards. We test our algorithm (which has less communication cost and fast convergence) in simulation, where we explore the effect of sensing radii, sensing accuracy, and heterogeneity among robotic teams with respect to the time taken to complete exploration and path traveled. We observe that having a team of agents with heterogeneous behaviors is beneficial.
BEASST: Behavioral Entropic Gradient based Adaptive Source Seeking for Mobile Robots
Aug 14, 2025This paper presents BEASST (Behavioral Entropic Gradient-based Adaptive Source Seeking for Mobile Robots), a novel framework for robotic source seeking in complex, unknown environments. Our approach enables mobile robots to efficiently balance exploration and exploitation by modeling normalized signal strength as a surrogate probability of source location. Building on Behavioral Entropy(BE) with Prelec's probability weighting function, we define an objective function that adapts robot behavior from risk-averse to risk-seeking based on signal reliability and mission urgency. The framework provides theoretical convergence guarantees under unimodal signal assumptions and practical stability under bounded disturbances. Experimental validation across DARPA SubT and multi-room scenarios demonstrates that BEASST consistently outperforms state-of-the-art methods, achieving 15% reduction in path length and 20% faster source localization through intelligent uncertainty-driven navigation that dynamically transitions between aggressive pursuit and cautious exploration.
Behaviorally Adaptive Multi-Robot Hazard Localization in Failure-Prone, Communication-Denied Environments
Aug 06, 2025



We address the challenge of multi-robot autonomous hazard mapping in high-risk, failure-prone, communication-denied environments such as post-disaster zones, underground mines, caves, and planetary surfaces. In these missions, robots must explore and map hazards while minimizing the risk of failure due to environmental threats or hardware limitations. We introduce a behavior-adaptive, information-theoretic planning framework for multi-robot teams grounded in the concept of Behavioral Entropy (BE), that generalizes Shannon entropy (SE) to capture diverse human-like uncertainty evaluations. Building on this formulation, we propose the Behavior-Adaptive Path Planning (BAPP) framework, which modulates information gathering strategies via a tunable risk-sensitivity parameter, and present two planning algorithms: BAPP-TID for intelligent triggering of high-fidelity robots, and BAPP-SIG for safe deployment under high risk. We provide theoretical insights on the informativeness of the proposed BAPP framework and validate its effectiveness through both single-robot and multi-robot simulations. Our results show that the BAPP stack consistently outperforms Shannon-based and random strategies: BAPP-TID accelerates entropy reduction, while BAPP-SIG improves robot survivability with minimal loss in information gain. In multi-agent deployments, BAPP scales effectively through spatial partitioning, mobile base relocation, and role-aware heterogeneity. These findings underscore the value of behavior-adaptive planning for robust, risk-sensitive exploration in complex, failure-prone environments.
Language-Grounded Hierarchical Planning and Execution with Multi-Robot 3D Scene Graphs
Jun 09, 2025In this paper, we introduce a multi-robot system that integrates mapping, localization, and task and motion planning (TAMP) enabled by 3D scene graphs to execute complex instructions expressed in natural language. Our system builds a shared 3D scene graph incorporating an open-set object-based map, which is leveraged for multi-robot 3D scene graph fusion. This representation supports real-time, view-invariant relocalization (via the object-based map) and planning (via the 3D scene graph), allowing a team of robots to reason about their surroundings and execute complex tasks. Additionally, we introduce a planning approach that translates operator intent into Planning Domain Definition Language (PDDL) goals using a Large Language Model (LLM) by leveraging context from the shared 3D scene graph and robot capabilities. We provide an experimental assessment of the performance of our system on real-world tasks in large-scale, outdoor environments.
Air-Ground Collaboration for Language-Specified Missions in Unknown Environments
May 14, 2025As autonomous robotic systems become increasingly mature, users will want to specify missions at the level of intent rather than in low-level detail. Language is an expressive and intuitive medium for such mission specification. However, realizing language-guided robotic teams requires overcoming significant technical hurdles. Interpreting and realizing language-specified missions requires advanced semantic reasoning. Successful heterogeneous robots must effectively coordinate actions and share information across varying viewpoints. Additionally, communication between robots is typically intermittent, necessitating robust strategies that leverage communication opportunities to maintain coordination and achieve mission objectives. In this work, we present a first-of-its-kind system where an unmanned aerial vehicle (UAV) and an unmanned ground vehicle (UGV) are able to collaboratively accomplish missions specified in natural language while reacting to changes in specification on the fly. We leverage a Large Language Model (LLM)-enabled planner to reason over semantic-metric maps that are built online and opportunistically shared between an aerial and a ground robot. We consider task-driven navigation in urban and rural areas. Our system must infer mission-relevant semantics and actively acquire information via semantic mapping. In both ground and air-ground teaming experiments, we demonstrate our system on seven different natural-language specifications at up to kilometer-scale navigation.
NavEX: A Multi-Agent Coverage in Non-Convex and Uneven Environments via Exemplar-Clustering
Apr 29, 2025This paper addresses multi-agent deployment in non-convex and uneven environments. To overcome the limitations of traditional approaches, we introduce Navigable Exemplar-Based Dispatch Coverage (NavEX), a novel dispatch coverage framework that combines exemplar-clustering with obstacle-aware and traversability-aware shortest distances, offering a deployment framework based on submodular optimization. NavEX provides a unified approach to solve two critical coverage tasks: (a) fair-access deployment, aiming to provide equitable service by minimizing agent-target distances, and (b) hotspot deployment, prioritizing high-density target regions. A key feature of NavEX is the use of exemplar-clustering for the coverage utility measure, which provides the flexibility to employ non-Euclidean distance metrics that do not necessarily conform to the triangle inequality. This allows NavEX to incorporate visibility graphs for shortest-path computation in environments with planar obstacles, and traversability-aware RRT* for complex, rugged terrains. By leveraging submodular optimization, the NavEX framework enables efficient, near-optimal solutions with provable performance guarantees for multi-agent deployment in realistic and complex settings, as demonstrated by our simulations.
Behavioral Entropy-Guided Dataset Generation for Offline Reinforcement Learning
Feb 06, 2025Entropy-based objectives are widely used to perform state space exploration in reinforcement learning (RL) and dataset generation for offline RL. Behavioral entropy (BE), a rigorous generalization of classical entropies that incorporates cognitive and perceptual biases of agents, was recently proposed for discrete settings and shown to be a promising metric for robotic exploration problems. In this work, we propose using BE as a principled exploration objective for systematically generating datasets that provide diverse state space coverage in complex, continuous, potentially high-dimensional domains. To achieve this, we extend the notion of BE to continuous settings, derive tractable $k$-nearest neighbor estimators, provide theoretical guarantees for these estimators, and develop practical reward functions that can be used with standard RL methods to learn BE-maximizing policies. Using standard MuJoCo environments, we experimentally compare the performance of offline RL algorithms for a variety of downstream tasks on datasets generated using BE, R\'{e}nyi, and Shannon entropy-maximizing policies, as well as the SMM and RND algorithms. We find that offline RL algorithms trained on datasets collected using BE outperform those trained on datasets collected using Shannon entropy, SMM, and RND on all tasks considered, and on 80% of the tasks compared to datasets collected using R\'{e}nyi entropy.
Safe and Dynamically-Feasible Motion Planning using Control Lyapunov and Barrier Functions
Oct 10, 2024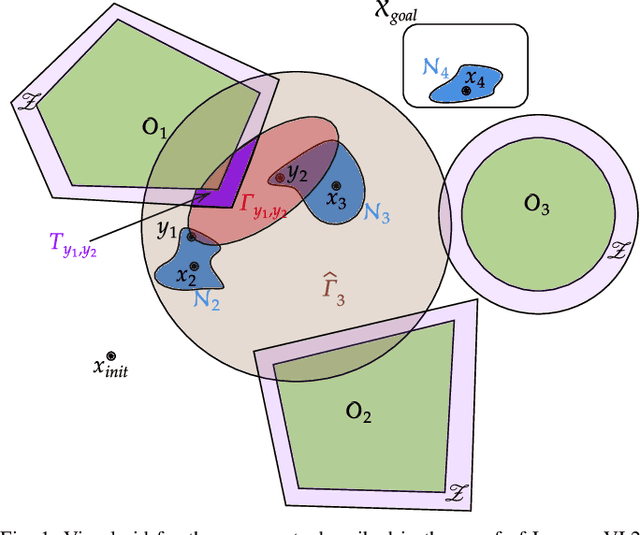

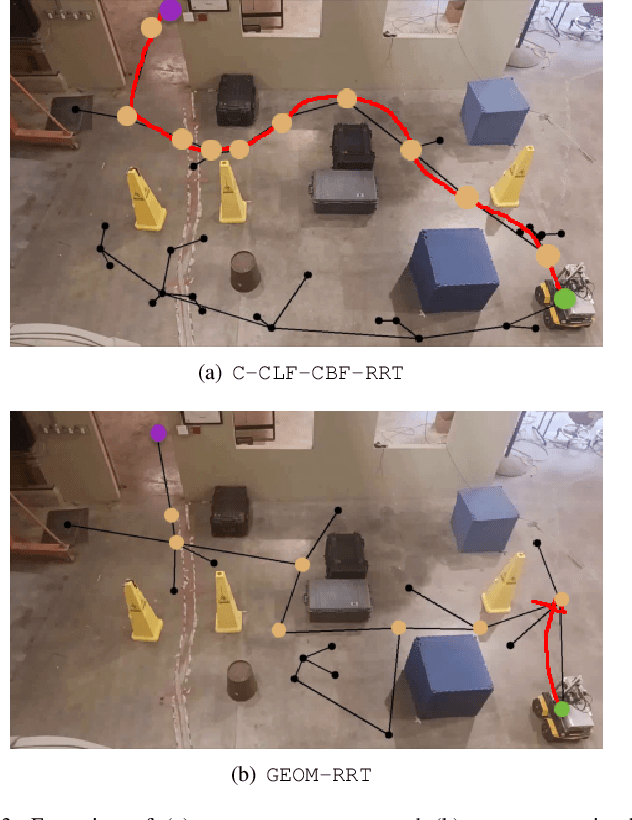
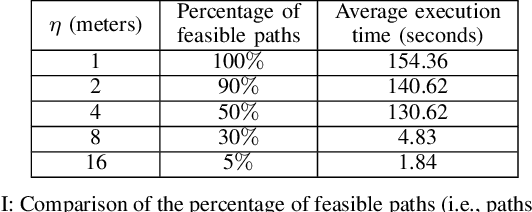
This paper considers the problem of designing motion planning algorithms for control-affine systems that generate collision-free paths from an initial to a final destination and can be executed using safe and dynamically-feasible controllers. We introduce the C-CLF-CBF-RRT algorithm, which produces paths with such properties and leverages rapidly exploring random trees (RRTs), control Lyapunov functions (CLFs) and control barrier functions (CBFs). We show that C-CLF-CBF-RRT is computationally efficient for a variety of different dynamics and obstacles, and establish its probabilistic completeness. We showcase the performance of C-CLF-CBF-RRT in different simulation and hardware experiments.