 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime-Optimized Safe Navigation in Unstructured Environments through Learning Based Depth Completion
Jun 17, 2025Quadrotors hold significant promise for several applications such as agriculture, search and rescue, and infrastructure inspection. Achieving autonomous operation requires systems to navigate safely through complex and unfamiliar environments. This level of autonomy is particularly challenging due to the complexity of such environments and the need for real-time decision making especially for platforms constrained by size, weight, and power (SWaP), which limits flight time and precludes the use of bulky sensors like Light Detection and Ranging (LiDAR) for mapping. Furthermore, computing globally optimal, collision-free paths and translating them into time-optimized, safe trajectories in real time adds significant computational complexity. To address these challenges, we present a fully onboard, real-time navigation system that relies solely on lightweight onboard sensors. Our system constructs a dense 3D map of the environment using a novel visual depth estimation approach that fuses stereo and monocular learning-based depth, yielding longer-range, denser, and less noisy depth maps than conventional stereo methods. Building on this map, we introduce a novel planning and trajectory generation framework capable of rapidly computing time-optimal global trajectories. As the map is incrementally updated with new depth information, our system continuously refines the trajectory to maintain safety and optimality. Both our planner and trajectory generator outperforms state-of-the-art methods in terms of computational efficiency and guarantee obstacle-free trajectories. We validate our system through robust autonomous flight experiments in diverse indoor and outdoor environments, demonstrating its effectiveness for safe navigation in previously unknown settings.
ES-HPC-MPC: Exponentially Stable Hybrid Perception Constrained MPC for Quadrotor with Suspended Payloads
Apr 10, 2025Aerial transportation using quadrotors with cable-suspended payloads holds great potential for applications in disaster response, logistics, and infrastructure maintenance. However, their hybrid and underactuated dynamics pose significant control and perception challenges. Traditional approaches often assume a taut cable condition, limiting their effectiveness in real-world applications where slack-to-taut transitions occur due to disturbances. We introduce ES-HPC-MPC, a model predictive control framework that enforces exponential stability and perception-constrained control under hybrid dynamics. Our method leverages Exponentially Stabilizing Control Lyapunov Functions (ES-CLFs) to enforce stability during the tasks and Control Barrier Functions (CBFs) to maintain the payload within the onboard camera's field of view (FoV). We validate our method through both simulation and real-world experiments, demonstrating stable trajectory tracking and reliable payload perception. We validate that our method maintains stability and satisfies perception constraints while tracking dynamically infeasible trajectories and when the system is subjected to hybrid mode transitions caused by unexpected disturbances.
Intuitive Human-Drone Collaborative Navigation in Unknown Environments through Mixed Reality
Apr 02, 2025Considering the widespread integration of aerial robots in inspection, search and rescue, and monitoring tasks, there is a growing demand to design intuitive human-drone interfaces. These aim to streamline and enhance the user interaction and collaboration process during drone navigation, ultimately expediting mission success and accommodating users' inputs. In this paper, we present a novel human-drone mixed reality interface that aims to (a) increase human-drone spatial awareness by sharing relevant spatial information and representations between the human equipped with a Head Mounted Display (HMD) and the robot and (b) enable safer and intuitive human-drone interactive and collaborative navigation in unknown environments beyond the simple command and control or teleoperation paradigm. We validate our framework through extensive user studies and experiments in a simulated post-disaster scenarios, comparing its performance against a traditional First-Person View (FPV) control systems. Furthermore, multiple tests on several users underscore the advantages of the proposed solution, which offers intuitive and natural interaction with the system. This demonstrates the solution's ability to assist humans during a drone navigation mission, ensuring its safe and effective execution.
* Approved at ICUAS 25
Optimal Trajectory Planning for Cooperative Manipulation with Multiple Quadrotors Using Control Barrier Functions
Mar 04, 2025



In this paper, we present a novel trajectory planning algorithm for cooperative manipulation with multiple quadrotors using control barrier functions (CBFs). Our approach addresses the complex dynamics of a system in which a team of quadrotors transports and manipulates a cable-suspended rigid-body payload in environments cluttered with obstacles. The proposed algorithm ensures obstacle avoidance for the entire system, including the quadrotors, cables, and the payload in all six degrees of freedom (DoF). We introduce the use of CBFs to enable safe and smooth maneuvers, effectively navigating through cluttered environments while accommodating the system's nonlinear dynamics. To simplify complex constraints, the system components are modeled as convex polytopes, and the Duality theorem is employed to reduce the computational complexity of the optimization problem. We validate the performance of our planning approach both in simulation and real-world environments using multiple quadrotors. The results demonstrate the effectiveness of the proposed approach in achieving obstacle avoidance and safe trajectory generation for cooperative transportation tasks.
UASTHN: Uncertainty-Aware Deep Homography Estimation for UAV Satellite-Thermal Geo-localization
Feb 03, 2025Geo-localization is an essential component of Unmanned Aerial Vehicle (UAV) navigation systems to ensure precise absolute self-localization in outdoor environments. To address the challenges of GPS signal interruptions or low illumination, Thermal Geo-localization (TG) employs aerial thermal imagery to align with reference satellite maps to accurately determine the UAV's location. However, existing TG methods lack uncertainty measurement in their outputs, compromising system robustness in the presence of textureless or corrupted thermal images, self-similar or outdated satellite maps, geometric noises, or thermal images exceeding satellite maps. To overcome these limitations, this paper presents \textit{UASTHN}, a novel approach for Uncertainty Estimation (UE) in Deep Homography Estimation (DHE) tasks for TG applications. Specifically, we introduce a novel Crop-based Test-Time Augmentation (CropTTA) strategy, which leverages the homography consensus of cropped image views to effectively measure data uncertainty. This approach is complemented by Deep Ensembles (DE) employed for model uncertainty, offering comparable performance with improved efficiency and seamless integration with any DHE model. Extensive experiments across multiple DHE models demonstrate the effectiveness and efficiency of CropTTA in TG applications. Analysis of detected failure cases underscores the improved reliability of CropTTA under challenging conditions. Finally, we demonstrate the capability of combining CropTTA and DE for a comprehensive assessment of both data and model uncertainty. Our research provides profound insights into the broader intersection of localization and uncertainty estimation. The code and data is publicly available.
HPA-MPC: Hybrid Perception-Aware Nonlinear Model Predictive Control for Quadrotors with Suspended Loads
Nov 18, 2024Quadrotors equipped with cable-suspended loads represent a versatile, low-cost, and energy efficient solution for aerial transportation, construction, and manipulation tasks. However, their real-world deployment is hindered by several challenges. The system is difficult to control because it is nonlinear, underactuated, involves hybrid dynamics due to slack-taut cable modes, and evolves on complex configuration spaces. Additionally, it is crucial to estimate the full state and the cable's mode transitions in real-time using on-board sensors and computation. To address these challenges, we present a novel Hybrid Perception-Aware Nonlinear Model Predictive Control (HPA-MPC) control approach for quadrotors with suspended loads. Our method considers the complete hybrid system dynamics and includes a perception-aware cost to ensure the payload remains visible in the robot's camera during navigation. Furthermore, the full state and hybrid dynamics' transitions are estimated using onboard sensors. Experimental results demonstrate that our approach enables stable load tracking control, even during slack-taut transitions, and operates entirely onboard. The experiments also show that the perception-aware term effectively keeps the payload in the robot's camera field of view when a human operator interacts with the load.
The Power of Input: Benchmarking Zero-Shot Sim-To-Real Transfer of Reinforcement Learning Control Policies for Quadrotor Control
Oct 10, 2024



In the last decade, data-driven approaches have become popular choices for quadrotor control, thanks to their ability to facilitate the adaptation to unknown or uncertain flight conditions. Among the different data-driven paradigms, Deep Reinforcement Learning (DRL) is currently one of the most explored. However, the design of DRL agents for Micro Aerial Vehicles (MAVs) remains an open challenge. While some works have studied the output configuration of these agents (i.e., what kind of control to compute), there is no general consensus on the type of input data these approaches should employ. Multiple works simply provide the DRL agent with full state information, without questioning if this might be redundant and unnecessarily complicate the learning process, or pose superfluous constraints on the availability of such information in real platforms. In this work, we provide an in-depth benchmark analysis of different configurations of the observation space. We optimize multiple DRL agents in simulated environments with different input choices and study their robustness and their sim-to-real transfer capabilities with zero-shot adaptation. We believe that the outcomes and discussions presented in this work supported by extensive experimental results could be an important milestone in guiding future research on the development of DRL agents for aerial robot tasks.
Decentralized Nonlinear Model Predictive Control for Safe Collision Avoidance in Quadrotor Teams with Limited Detection Range
Sep 25, 2024Multi-quadrotor systems face significant challenges in decentralized control, particularly with safety and coordination under sensing and communication limitations. State-of-the-art methods leverage Control Barrier Functions (CBFs) to provide safety guarantees but often neglect actuation constraints and limited detection range. To address these gaps, we propose a novel decentralized Nonlinear Model Predictive Control (NMPC) that integrates Exponential CBFs (ECBFs) to enhance safety and optimality in multi-quadrotor systems. We provide both conservative and practical minimum bounds of the range that preserve the safety guarantees of the ECBFs. We validate our approach through extensive simulations with up to 10 quadrotors and 20 obstacles, as well as real-world experiments with 3 quadrotors. Results demonstrate the effectiveness of the proposed framework in realistic settings, highlighting its potential for reliable quadrotor teams operations.
Reactive Collision Avoidance for Safe Agile Navigation
Sep 18, 2024

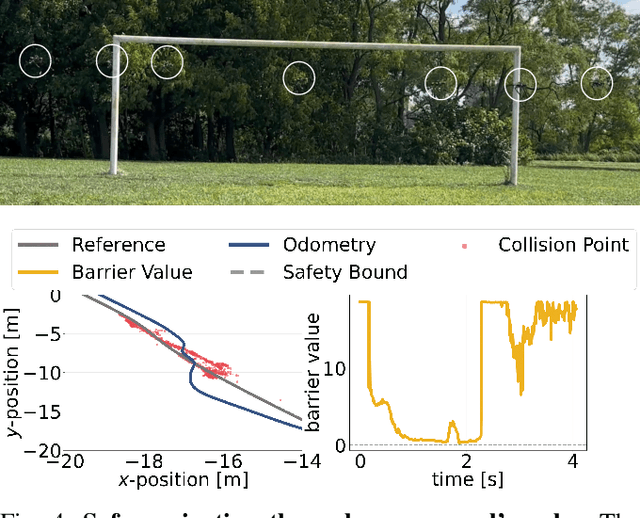

Reactive collision avoidance is essential for agile robots navigating complex and dynamic environments, enabling real-time obstacle response. However, this task is inherently challenging because it requires a tight integration of perception, planning, and control, which traditional methods often handle separately, resulting in compounded errors and delays. This paper introduces a novel approach that unifies these tasks into a single reactive framework using solely onboard sensing and computing. Our method combines nonlinear model predictive control with adaptive control barrier functions, directly linking perception-driven constraints to real-time planning and control. Constraints are determined by using a neural network to refine noisy RGB-D data, enhancing depth accuracy, and selecting points with the minimum time-to-collision to prioritize the most immediate threats. To maintain a balance between safety and agility, a heuristic dynamically adjusts the optimization process, preventing overconstraints in real time. Extensive experiments with an agile quadrotor demonstrate effective collision avoidance across diverse indoor and outdoor environments, without requiring environment-specific tuning or explicit mapping.
Learning Long-Horizon Predictions for Quadrotor Dynamics
Jul 17, 2024Accurate modeling of system dynamics is crucial for achieving high-performance planning and control of robotic systems. Although existing data-driven approaches represent a promising approach for modeling dynamics, their accuracy is limited to a short prediction horizon, overlooking the impact of compounding prediction errors over longer prediction horizons. Strategies to mitigate these cumulative errors remain underexplored. To bridge this gap, in this paper, we study the key design choices for efficiently learning long-horizon prediction dynamics for quadrotors. Specifically, we analyze the impact of multiple architectures, historical data, and multi-step loss formulation. We show that sequential modeling techniques showcase their advantage in minimizing compounding errors compared to other types of solutions. Furthermore, we propose a novel decoupled dynamics learning approach, which further simplifies the learning process while also enhancing the approach modularity. Extensive experiments and ablation studies on real-world quadrotor data demonstrate the versatility and precision of the proposed approach. Our outcomes offer several insights and methodologies for enhancing long-term predictive accuracy of learned quadrotor dynamics for planning and control.