 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUASTHN: Uncertainty-Aware Deep Homography Estimation for UAV Satellite-Thermal Geo-localization
Feb 03, 2025Geo-localization is an essential component of Unmanned Aerial Vehicle (UAV) navigation systems to ensure precise absolute self-localization in outdoor environments. To address the challenges of GPS signal interruptions or low illumination, Thermal Geo-localization (TG) employs aerial thermal imagery to align with reference satellite maps to accurately determine the UAV's location. However, existing TG methods lack uncertainty measurement in their outputs, compromising system robustness in the presence of textureless or corrupted thermal images, self-similar or outdated satellite maps, geometric noises, or thermal images exceeding satellite maps. To overcome these limitations, this paper presents \textit{UASTHN}, a novel approach for Uncertainty Estimation (UE) in Deep Homography Estimation (DHE) tasks for TG applications. Specifically, we introduce a novel Crop-based Test-Time Augmentation (CropTTA) strategy, which leverages the homography consensus of cropped image views to effectively measure data uncertainty. This approach is complemented by Deep Ensembles (DE) employed for model uncertainty, offering comparable performance with improved efficiency and seamless integration with any DHE model. Extensive experiments across multiple DHE models demonstrate the effectiveness and efficiency of CropTTA in TG applications. Analysis of detected failure cases underscores the improved reliability of CropTTA under challenging conditions. Finally, we demonstrate the capability of combining CropTTA and DE for a comprehensive assessment of both data and model uncertainty. Our research provides profound insights into the broader intersection of localization and uncertainty estimation. The code and data is publicly available.
STHN: Deep Homography Estimation for UAV Thermal Geo-localization with Satellite Imagery
May 30, 2024Accurate geo-localization of Unmanned Aerial Vehicles (UAVs) is crucial for a variety of outdoor applications including search and rescue operations, power line inspections, and environmental monitoring. The vulnerability of Global Navigation Satellite Systems (GNSS) signals to interference and spoofing necessitates the development of additional robust localization methods for autonomous navigation. Visual Geo-localization (VG), leveraging onboard cameras and reference satellite maps, offers a promising solution for absolute localization. Specifically, Thermal Geo-localization (TG), which relies on image-based matching between thermal imagery with satellite databases, stands out by utilizing infrared cameras for effective night-time localization. However, the efficiency and effectiveness of current TG approaches, are hindered by dense sampling on satellite maps and geometric noises in thermal query images. To overcome these challenges, in this paper, we introduce STHN, a novel UAV thermal geo-localization approach that employs a coarse-to-fine deep homography estimation method. This method attains reliable thermal geo-localization within a 512-meter radius of the UAV's last known location even with a challenging 11% overlap between satellite and thermal images, despite the presence of indistinct textures in thermal imagery and self-similar patterns in both spectra. Our research significantly enhances UAV thermal geo-localization performance and robustness against the impacts of geometric noises under low-visibility conditions in the wild. The code will be made publicly available.
Unifying Foundation Models with Quadrotor Control for Visual Tracking Beyond Object Categories
Oct 17, 2023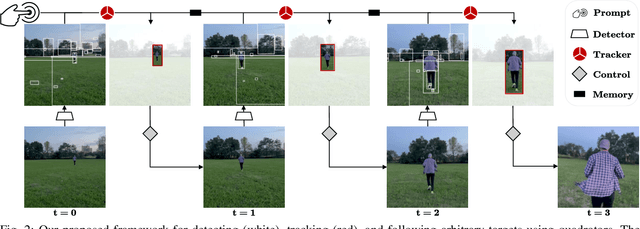
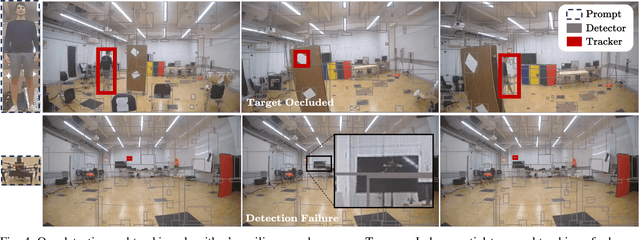


Visual control enables quadrotors to adaptively navigate using real-time sensory data, bridging perception with action. Yet, challenges persist, including generalization across scenarios, maintaining reliability, and ensuring real-time responsiveness. This paper introduces a perception framework grounded in foundation models for universal object detection and tracking, moving beyond specific training categories. Integral to our approach is a multi-layered tracker integrated with the foundation detector, ensuring continuous target visibility, even when faced with motion blur, abrupt light shifts, and occlusions. Complementing this, we introduce a model-free controller tailored for resilient quadrotor visual tracking. Our system operates efficiently on limited hardware, relying solely on an onboard camera and an inertial measurement unit. Through extensive validation in diverse challenging indoor and outdoor environments, we demonstrate our system's effectiveness and adaptability. In conclusion, our research represents a step forward in quadrotor visual tracking, moving from task-specific methods to more versatile and adaptable operations.
Visual Geo-localization with Self-supervised Representation Learning
Jul 31, 2023



Visual Geo-localization (VG) has emerged as a significant research area, aiming to identify geolocation based on visual features. Most VG approaches use learnable feature extractors for representation learning. Recently, Self-Supervised Learning (SSL) methods have also demonstrated comparable performance to supervised methods by using numerous unlabeled images for representation learning. In this work, we present a novel unified VG-SSL framework with the goal to enhance performance and training efficiency on a large VG dataset by SSL methods. Our work incorporates multiple SSL methods tailored for VG: SimCLR, MoCov2, BYOL, SimSiam, Barlow Twins, and VICReg. We systematically analyze the performance of different training strategies and study the optimal parameter settings for the adaptation of SSL methods for the VG task. The results demonstrate that our method, without the significant computation and memory usage associated with Hard Negative Mining (HNM), can match or even surpass the VG performance of the baseline that employs HNM. The code is available at https://github.com/arplaboratory/VG_SSL.
Long-range UAV Thermal Geo-localization with Satellite Imagery
Jun 06, 2023Onboard sensors, such as cameras and thermal sensors, have emerged as effective alternatives to Global Positioning System (GPS) for geo-localization in Unmanned Aerial Vehicle (UAV) navigation. Since GPS can suffer from signal loss and spoofing problems, researchers have explored camera-based techniques such as Visual Geo-localization (VG) using satellite imagery. Additionally, thermal geo-localization (TG) has become crucial for long-range UAV flights in low-illumination environments. This paper proposes a novel thermal geo-localization framework using satellite imagery, which includes multiple domain adaptation methods to address the limited availability of paired thermal and satellite images. The experimental results demonstrate the effectiveness of the proposed approach in achieving reliable thermal geo-localization performance, even in thermal images with indistinct self-similar features. We evaluate our approach on real data collected onboard a UAV. We also release the code and \textit{Boson-nighttime}, a dataset of paired satellite-thermal and unpaired satellite images for thermal geo-localization with satellite imagery. To the best of our knowledge, this work is the first to propose a thermal geo-localization method using satellite imagery in long-range flights.
Identity Preserving Loss for Learned Image Compression
Apr 27, 2022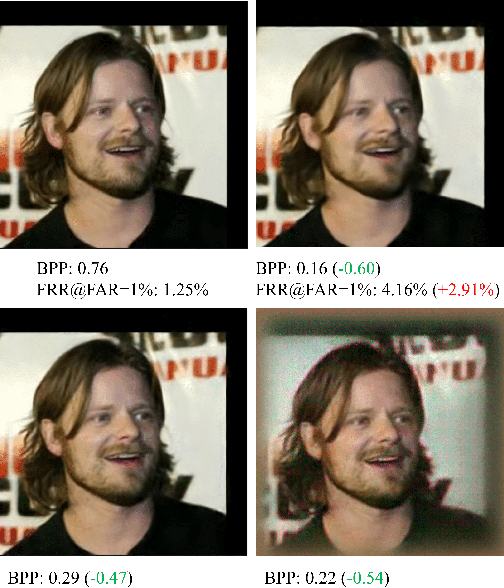

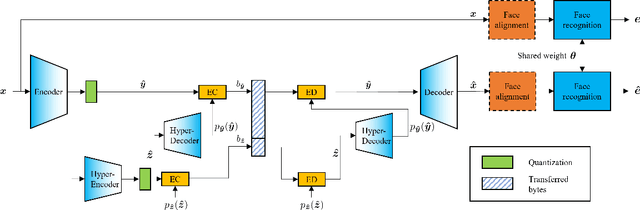
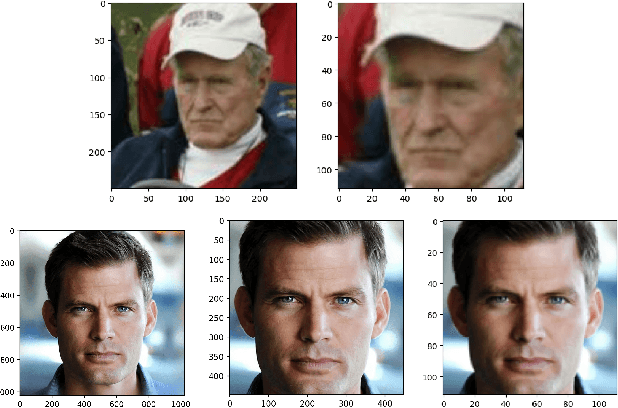
Deep learning model inference on embedded devices is challenging due to the limited availability of computation resources. A popular alternative is to perform model inference on the cloud, which requires transmitting images from the embedded device to the cloud. Image compression techniques are commonly employed in such cloud-based architectures to reduce transmission latency over low bandwidth networks. This work proposes an end-to-end image compression framework that learns domain-specific features to achieve higher compression ratios than standard HEVC/JPEG compression techniques while maintaining accuracy on downstream tasks (e.g., recognition). Our framework does not require fine-tuning of the downstream task, which allows us to drop-in any off-the-shelf downstream task model without retraining. We choose faces as an application domain due to the ready availability of datasets and off-the-shelf recognition models as representative downstream tasks. We present a novel Identity Preserving Reconstruction (IPR) loss function which achieves Bits-Per-Pixel (BPP) values that are ~38% and ~42% of CRF-23 HEVC compression for LFW (low-resolution) and CelebA-HQ (high-resolution) datasets, respectively, while maintaining parity in recognition accuracy. The superior compression ratio is achieved as the model learns to retain the domain-specific features (e.g., facial features) while sacrificing details in the background. Furthermore, images reconstructed by our proposed compression model are robust to changes in downstream model architectures. We show at-par recognition performance on the LFW dataset with an unseen recognition model while retaining a lower BPP value of ~38% of CRF-23 HEVC compression.
Multi-Robot Collaborative Perception with Graph Neural Networks
Jan 23, 2022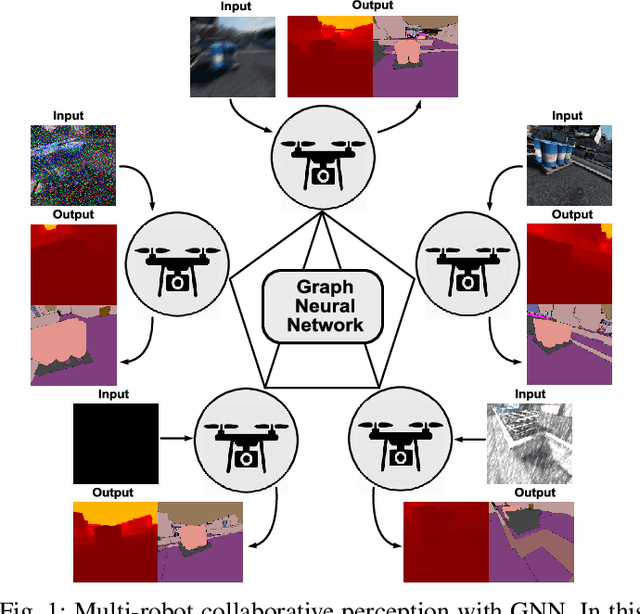
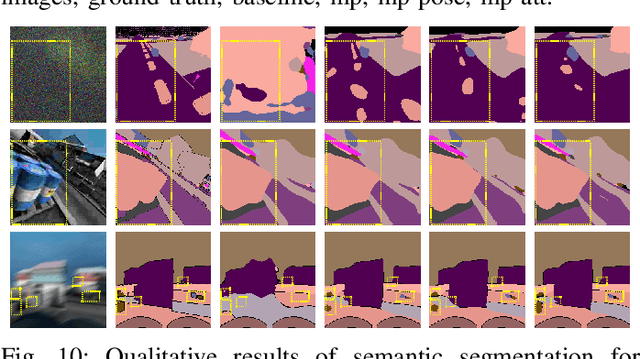
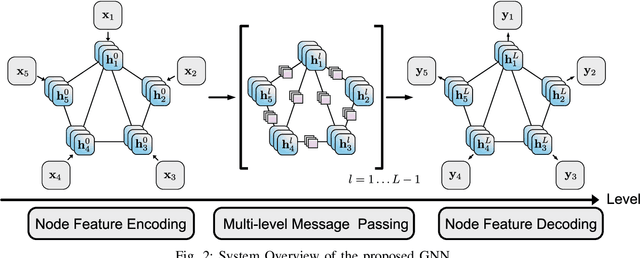
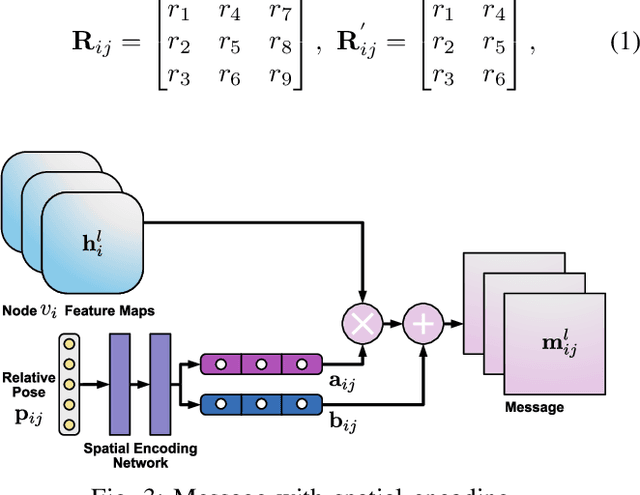
Multi-robot systems such as swarms of aerial robots are naturally suited to offer additional flexibility, resilience, and robustness in several tasks compared to a single robot by enabling cooperation among the agents. To enhance the autonomous robot decision-making process and situational awareness, multi-robot systems have to coordinate their perception capabilities to collect, share, and fuse environment information among the agents in an efficient and meaningful way such to accurately obtain context-appropriate information or gain resilience to sensor noise or failures. In this paper, we propose a general-purpose Graph Neural Network (GNN) with the main goal to increase, in multi-robot perception tasks, single robots' inference perception accuracy as well as resilience to sensor failures and disturbances. We show that the proposed framework can address multi-view visual perception problems such as monocular depth estimation and semantic segmentation. Several experiments both using photo-realistic and real data gathered from multiple aerial robots' viewpoints show the effectiveness of the proposed approach in challenging inference conditions including images corrupted by heavy noise and camera occlusions or failures.