 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Nonlinear Model Predictive Control for Safe Collision Avoidance in Quadrotor Teams with Limited Detection Range
Sep 25, 2024Multi-quadrotor systems face significant challenges in decentralized control, particularly with safety and coordination under sensing and communication limitations. State-of-the-art methods leverage Control Barrier Functions (CBFs) to provide safety guarantees but often neglect actuation constraints and limited detection range. To address these gaps, we propose a novel decentralized Nonlinear Model Predictive Control (NMPC) that integrates Exponential CBFs (ECBFs) to enhance safety and optimality in multi-quadrotor systems. We provide both conservative and practical minimum bounds of the range that preserve the safety guarantees of the ECBFs. We validate our approach through extensive simulations with up to 10 quadrotors and 20 obstacles, as well as real-world experiments with 3 quadrotors. Results demonstrate the effectiveness of the proposed framework in realistic settings, highlighting its potential for reliable quadrotor teams operations.
Reactive Collision Avoidance for Safe Agile Navigation
Sep 18, 2024

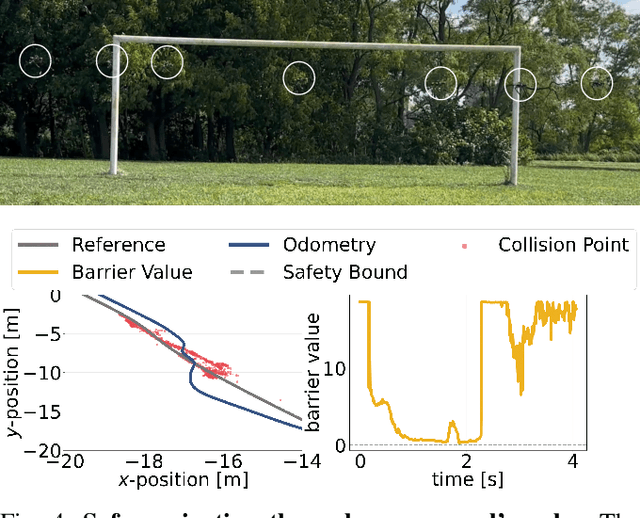

Reactive collision avoidance is essential for agile robots navigating complex and dynamic environments, enabling real-time obstacle response. However, this task is inherently challenging because it requires a tight integration of perception, planning, and control, which traditional methods often handle separately, resulting in compounded errors and delays. This paper introduces a novel approach that unifies these tasks into a single reactive framework using solely onboard sensing and computing. Our method combines nonlinear model predictive control with adaptive control barrier functions, directly linking perception-driven constraints to real-time planning and control. Constraints are determined by using a neural network to refine noisy RGB-D data, enhancing depth accuracy, and selecting points with the minimum time-to-collision to prioritize the most immediate threats. To maintain a balance between safety and agility, a heuristic dynamically adjusts the optimization process, preventing overconstraints in real time. Extensive experiments with an agile quadrotor demonstrate effective collision avoidance across diverse indoor and outdoor environments, without requiring environment-specific tuning or explicit mapping.
Learning Long-Horizon Predictions for Quadrotor Dynamics
Jul 17, 2024Accurate modeling of system dynamics is crucial for achieving high-performance planning and control of robotic systems. Although existing data-driven approaches represent a promising approach for modeling dynamics, their accuracy is limited to a short prediction horizon, overlooking the impact of compounding prediction errors over longer prediction horizons. Strategies to mitigate these cumulative errors remain underexplored. To bridge this gap, in this paper, we study the key design choices for efficiently learning long-horizon prediction dynamics for quadrotors. Specifically, we analyze the impact of multiple architectures, historical data, and multi-step loss formulation. We show that sequential modeling techniques showcase their advantage in minimizing compounding errors compared to other types of solutions. Furthermore, we propose a novel decoupled dynamics learning approach, which further simplifies the learning process while also enhancing the approach modularity. Extensive experiments and ablation studies on real-world quadrotor data demonstrate the versatility and precision of the proposed approach. Our outcomes offer several insights and methodologies for enhancing long-term predictive accuracy of learned quadrotor dynamics for planning and control.
Exploring Deep Reinforcement Learning for Robust Target Tracking using Micro Aerial Vehicles
Dec 29, 2023The capability to autonomously track a non-cooperative target is a key technological requirement for micro aerial vehicles. In this paper, we propose an output feedback control scheme based on deep reinforcement learning for controlling a micro aerial vehicle to persistently track a flying target while maintaining visual contact. The proposed method leverages relative position data for control, relaxing the assumption of having access to full state information which is typical of related approaches in literature. Moreover, we exploit classical robustness indicators in the learning process through domain randomization to increase the robustness of the learned policy. Experimental results validate the proposed approach for target tracking, demonstrating high performance and robustness with respect to mass mismatches and control delays. The resulting nonlinear controller significantly outperforms a standard model-based design in numerous off-nominal scenarios.
Unifying Foundation Models with Quadrotor Control for Visual Tracking Beyond Object Categories
Oct 17, 2023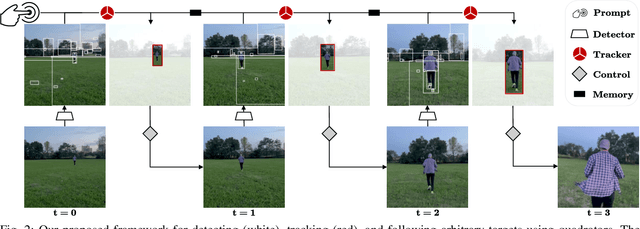
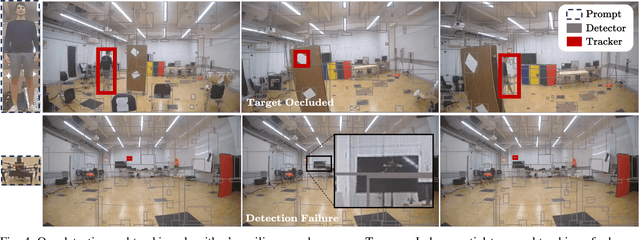


Visual control enables quadrotors to adaptively navigate using real-time sensory data, bridging perception with action. Yet, challenges persist, including generalization across scenarios, maintaining reliability, and ensuring real-time responsiveness. This paper introduces a perception framework grounded in foundation models for universal object detection and tracking, moving beyond specific training categories. Integral to our approach is a multi-layered tracker integrated with the foundation detector, ensuring continuous target visibility, even when faced with motion blur, abrupt light shifts, and occlusions. Complementing this, we introduce a model-free controller tailored for resilient quadrotor visual tracking. Our system operates efficiently on limited hardware, relying solely on an onboard camera and an inertial measurement unit. Through extensive validation in diverse challenging indoor and outdoor environments, we demonstrate our system's effectiveness and adaptability. In conclusion, our research represents a step forward in quadrotor visual tracking, moving from task-specific methods to more versatile and adaptable operations.
AutoCharge: Autonomous Charging for Perpetual Quadrotor Missions
Jun 08, 2023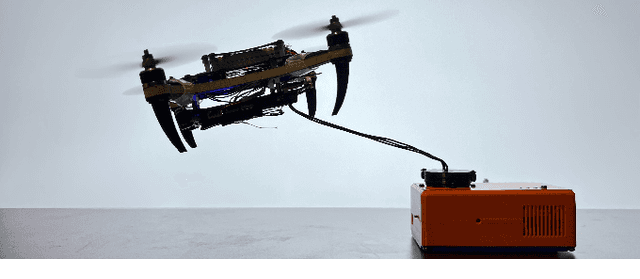
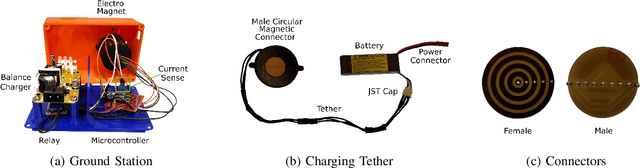
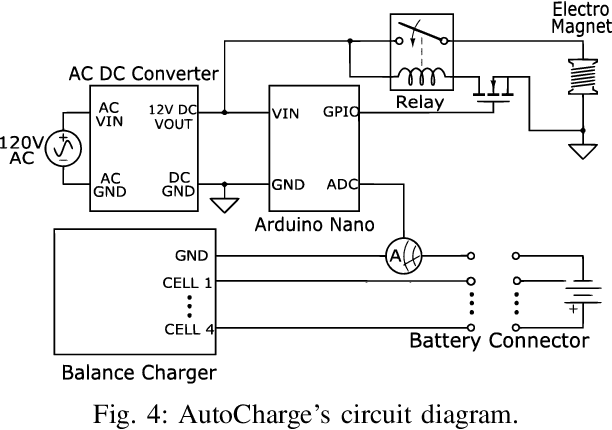
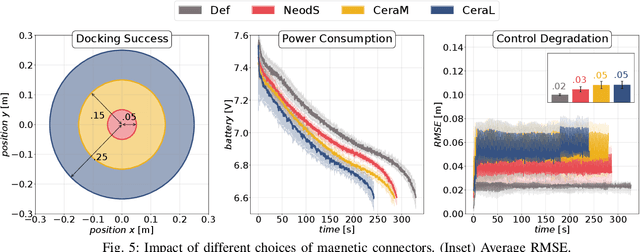
Battery endurance represents a key challenge for long-term autonomy and long-range operations, especially in the case of aerial robots. In this paper, we propose AutoCharge, an autonomous charging solution for quadrotors that combines a portable ground station with a flexible, lightweight charging tether and is capable of universal, highly efficient, and robust charging. We design and manufacture a pair of circular magnetic connectors to ensure a precise orientation-agnostic electrical connection between the ground station and the charging tether. Moreover, we supply the ground station with an electromagnet that largely increases the tolerance to localization and control errors during the docking maneuver, while still guaranteeing smooth un-docking once the charging process is completed. We demonstrate AutoCharge on a perpetual 10 hours quadrotor flight experiment and show that the docking and un-docking performance is solidly repeatable, enabling perpetual quadrotor flight missions.
GaPT: Gaussian Process Toolkit for Online Regression with Application to Learning Quadrotor Dynamics
Mar 14, 2023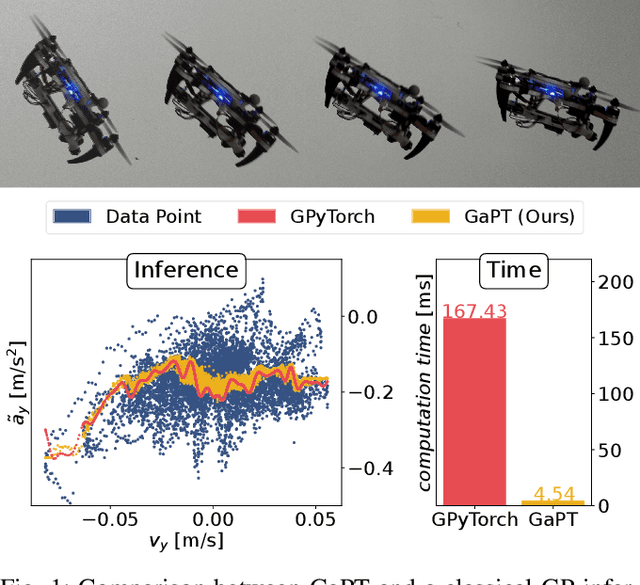
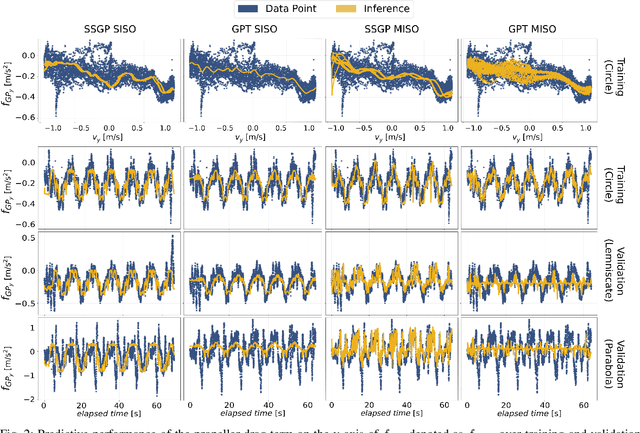
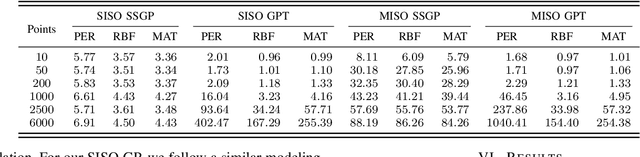
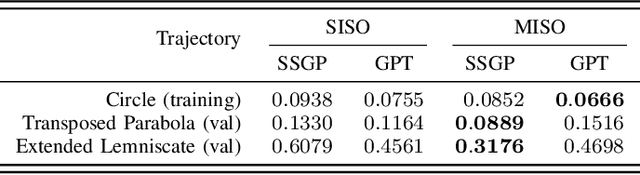
Gaussian Processes (GPs) are expressive models for capturing signal statistics and expressing prediction uncertainty. As a result, the robotics community has gathered interest in leveraging these methods for inference, planning, and control. Unfortunately, despite providing a closed-form inference solution, GPs are non-parametric models that typically scale cubically with the dataset size, hence making them difficult to be used especially on onboard Size, Weight, and Power (SWaP) constrained aerial robots. In addition, the integration of popular libraries with GPs for different kernels is not trivial. In this paper, we propose GaPT, a novel toolkit that converts GPs to their state space form and performs regression in linear time. GaPT is designed to be highly compatible with several optimizers popular in robotics. We thoroughly validate the proposed approach for learning quadrotor dynamics on both single and multiple input GP settings. GaPT accurately captures the system behavior in multiple flight regimes and operating conditions, including those producing highly nonlinear effects such as aerodynamic forces and rotor interactions. Moreover, the results demonstrate the superior computational performance of GaPT compared to a classical GP inference approach on both single and multi-input settings especially when considering large number of data points, enabling real-time regression speed on embedded platforms used on SWaP-constrained aerial robots.
Active Learning of Discrete-Time Dynamics for Uncertainty-Aware Model Predictive Control
Oct 23, 2022Model-based control requires an accurate model of the system dynamics for precisely and safely controlling the robot in complex and dynamic environments. Moreover, in presence of variations in the operating conditions, the model should be continuously refined to compensate for dynamics changes. In this paper, we propose a self-supervised learning approach to actively model robot discrete-time dynamics. We combine offline learning from past experience and online learning from present robot interaction with the unknown environment. These two ingredients enable highly sample-efficient and adaptive learning for accurate inference of the model dynamics in real-time even in operating regimes significantly different from the training distribution. Moreover, we design an uncertainty-aware model predictive controller that is conditioned to the aleatoric (data) uncertainty of the learned dynamics. The controller actively selects the optimal control actions that (i) optimize the control performance and (ii) boost the online learning sample efficiency. We apply the proposed method to a quadrotor system in multiple challenging real-world experiments. Our approach exhibits high flexibility and generalization capabilities by consistently adapting to unseen flight conditions, while it significantly outperforms classical and adaptive control baselines.
Physics-Inspired Temporal Learning of Quadrotor Dynamics for Accurate Model Predictive Trajectory Tracking
Jun 07, 2022
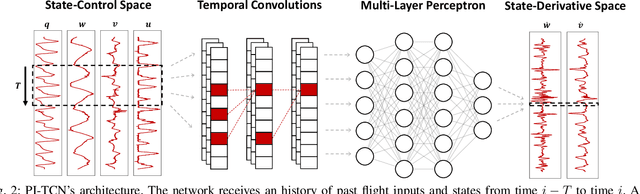
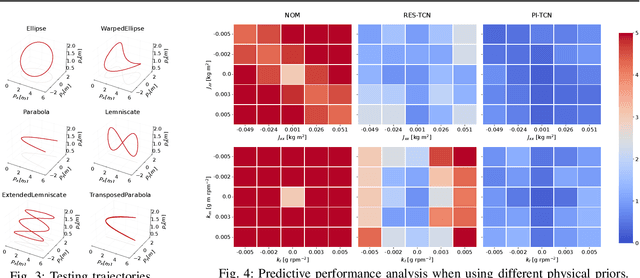
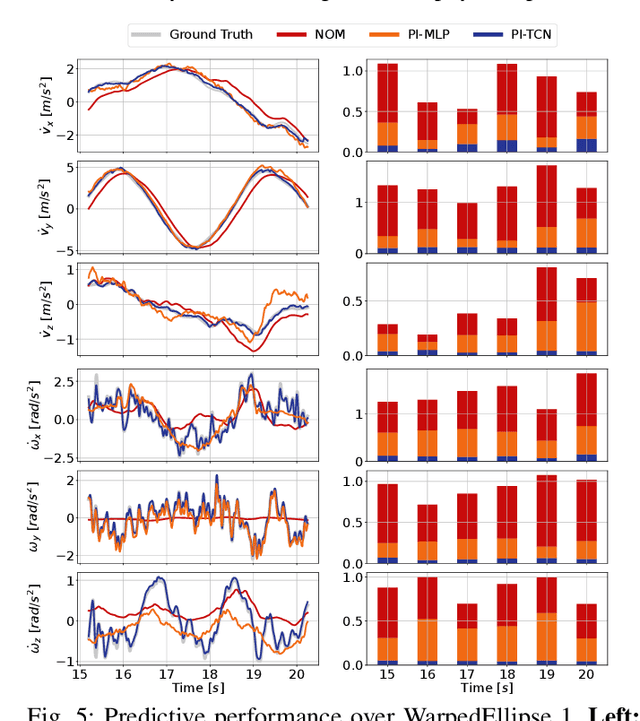
Accurately modeling quadrotor's system dynamics is critical for guaranteeing agile, safe, and stable navigation. The model needs to capture the system behavior in multiple flight regimes and operating conditions, including those producing highly nonlinear effects such as aerodynamic forces and torques, rotor interactions, or possible system configuration modifications. Classical approaches rely on handcrafted models and struggle to generalize and scale to capture these effects. In this paper, we present a novel Physics-Inspired Temporal Convolutional Network (PI-TCN) approach to learning quadrotor's system dynamics purely from robot experience. Our approach combines the expressive power of sparse temporal convolutions and dense feed-forward connections to make accurate system predictions. In addition, physics constraints are embedded in the training process to facilitate the network's generalization capabilities to data outside the training distribution. Finally, we design a model predictive control approach that incorporates the learned dynamics for accurate closed-loop trajectory tracking fully exploiting the learned model predictions in a receding horizon fashion. Experimental results demonstrate that our approach accurately extracts the structure of the quadrotor's dynamics from data, capturing effects that would remain hidden to classical approaches. To the best of our knowledge, this is the first time physics-inspired deep learning is successfully applied to temporal convolutional networks and to the system identification task, while concurrently enabling predictive control.
AutoTune: Controller Tuning for High-Speed Flight
Mar 19, 2021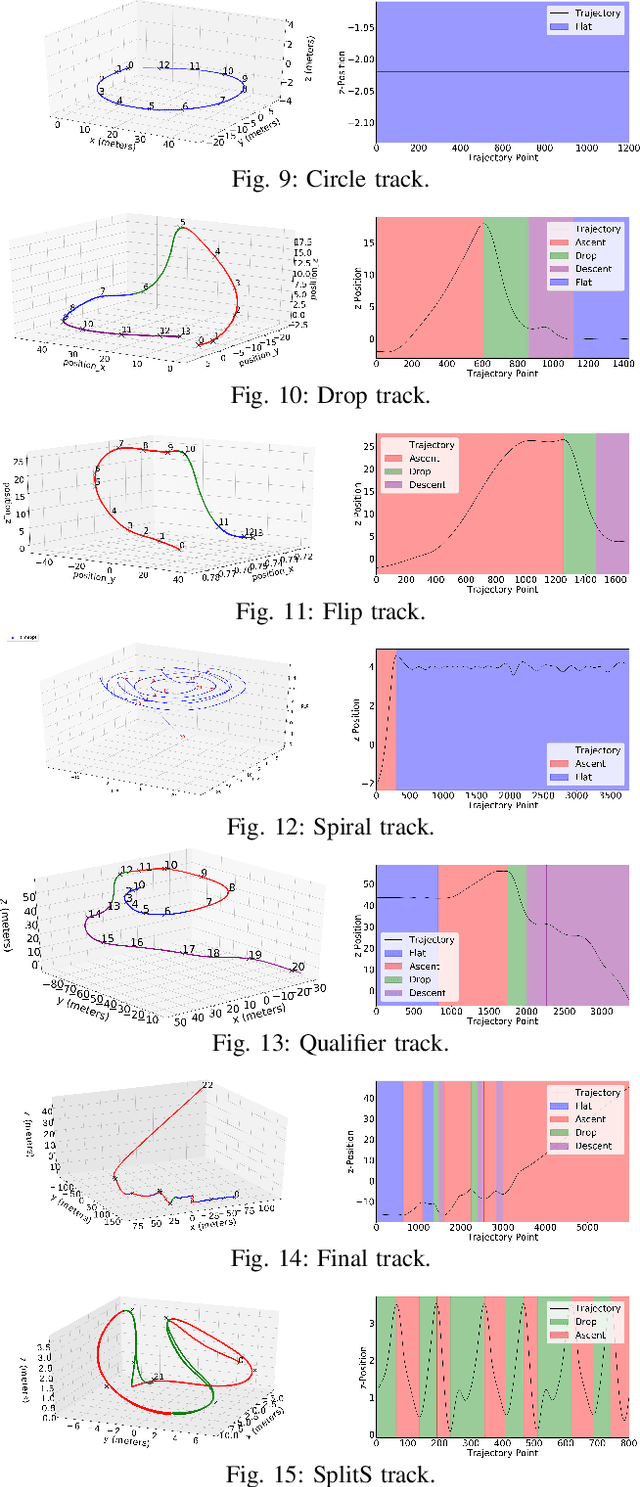
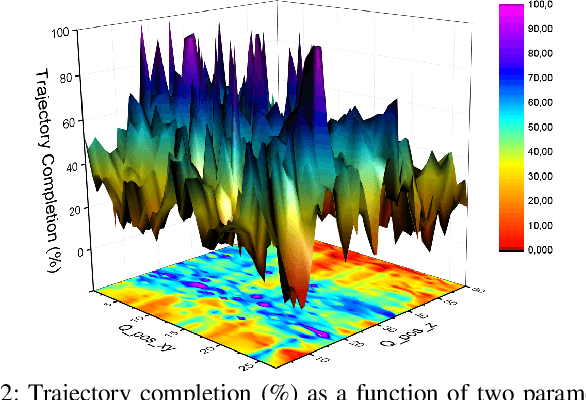

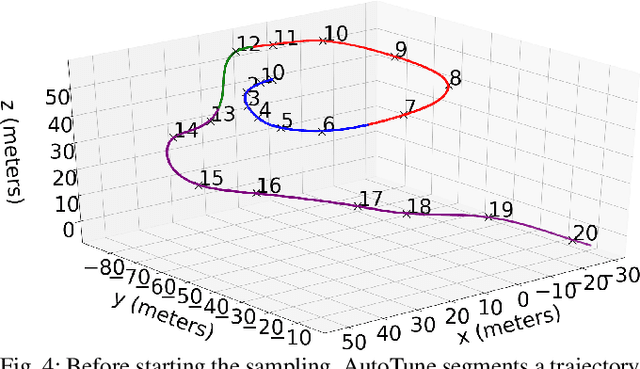
Due to noisy actuation and external disturbances, tuning controllers for high-speed flight is very challenging. In this paper, we ask the following questions: How sensitive are controllers to tuning when tracking high-speed maneuvers? What algorithms can we use to automatically tune them? To answer the first question, we study the relationship between parameters and performance and find out that the faster the maneuver, the more sensitive a controller becomes to its parameters. To answer the second question, we review existing methods for controller tuning and discover that prior works often perform poorly on the task of high-speed flight. Therefore, we propose AutoTune, a sampling-based tuning algorithm specifically tailored to high-speed flight. In contrast to previous work, our algorithm does not assume any prior knowledge of the drone or its optimization function and can deal with the multi-modal characteristics of the parameters' optimization space. We thoroughly evaluate AutoTune both in simulation and in the physical world. In our experiments, we outperform existing tuning algorithms by up to 90\% in trajectory completion. The resulting controllers are tested in the AirSim Game of Drones competition, where we outperform the winner by up to 25\% in lap-time. Finally, we show that AutoTune improves tracking error when flying a physical platform with respect to parameters tuned by a human expert.