 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Illumination for Visual Ego-Motion Estimation in the Dark
Feb 19, 2025



Visual Odometry (VO) and Visual SLAM (V-SLAM) systems often struggle in low-light and dark environments due to the lack of robust visual features. In this paper, we propose a novel active illumination framework to enhance the performance of VO and V-SLAM algorithms in these challenging conditions. The developed approach dynamically controls a moving light source to illuminate highly textured areas, thereby improving feature extraction and tracking. Specifically, a detector block, which incorporates a deep learning-based enhancing network, identifies regions with relevant features. Then, a pan-tilt controller is responsible for guiding the light beam toward these areas, so that to provide information-rich images to the ego-motion estimation algorithm. Experimental results on a real robotic platform demonstrate the effectiveness of the proposed method, showing a reduction in the pose estimation error up to 75% with respect to a traditional fixed lighting technique.
GaPT: Gaussian Process Toolkit for Online Regression with Application to Learning Quadrotor Dynamics
Mar 14, 2023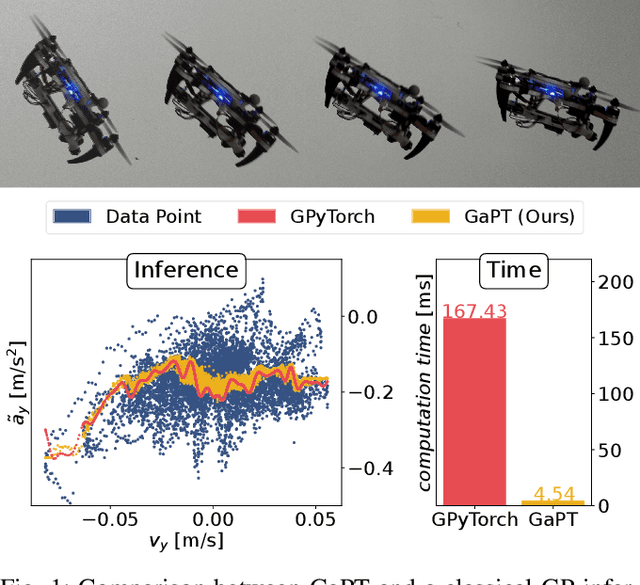
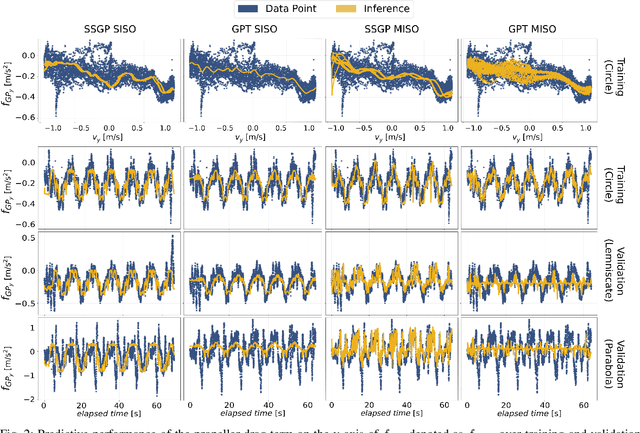
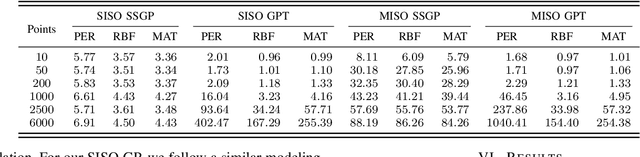
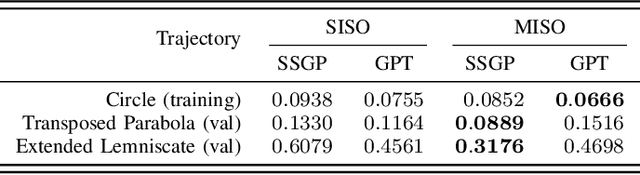
Gaussian Processes (GPs) are expressive models for capturing signal statistics and expressing prediction uncertainty. As a result, the robotics community has gathered interest in leveraging these methods for inference, planning, and control. Unfortunately, despite providing a closed-form inference solution, GPs are non-parametric models that typically scale cubically with the dataset size, hence making them difficult to be used especially on onboard Size, Weight, and Power (SWaP) constrained aerial robots. In addition, the integration of popular libraries with GPs for different kernels is not trivial. In this paper, we propose GaPT, a novel toolkit that converts GPs to their state space form and performs regression in linear time. GaPT is designed to be highly compatible with several optimizers popular in robotics. We thoroughly validate the proposed approach for learning quadrotor dynamics on both single and multiple input GP settings. GaPT accurately captures the system behavior in multiple flight regimes and operating conditions, including those producing highly nonlinear effects such as aerodynamic forces and rotor interactions. Moreover, the results demonstrate the superior computational performance of GaPT compared to a classical GP inference approach on both single and multi-input settings especially when considering large number of data points, enabling real-time regression speed on embedded platforms used on SWaP-constrained aerial robots.
Tire-road friction estimation and uncertainty assessment to improve electric aircraft braking system
Nov 14, 2022The accurate online estimation of the road-friction coefficient is an essential feature for any advanced brake control system. In this study, a data-driven scheme based on a MLP Neural Net is proposed to estimate the optimum friction coefficient as a function of windowed slip-friction measurements. A stochastic NN weights drop-out mechanism is used to online estimate the confidence interval of the estimated best friction coefficient thus providing a characterization of the epistemic uncertainty associated to the NN block. Open loop and closed loop simulations of the landing phase of an aircraft on an unknown surface are used to show the potentiality and efficacy of the proposed robust friction estimation approach.