 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime-Optimized Safe Navigation in Unstructured Environments through Learning Based Depth Completion
Jun 17, 2025Quadrotors hold significant promise for several applications such as agriculture, search and rescue, and infrastructure inspection. Achieving autonomous operation requires systems to navigate safely through complex and unfamiliar environments. This level of autonomy is particularly challenging due to the complexity of such environments and the need for real-time decision making especially for platforms constrained by size, weight, and power (SWaP), which limits flight time and precludes the use of bulky sensors like Light Detection and Ranging (LiDAR) for mapping. Furthermore, computing globally optimal, collision-free paths and translating them into time-optimized, safe trajectories in real time adds significant computational complexity. To address these challenges, we present a fully onboard, real-time navigation system that relies solely on lightweight onboard sensors. Our system constructs a dense 3D map of the environment using a novel visual depth estimation approach that fuses stereo and monocular learning-based depth, yielding longer-range, denser, and less noisy depth maps than conventional stereo methods. Building on this map, we introduce a novel planning and trajectory generation framework capable of rapidly computing time-optimal global trajectories. As the map is incrementally updated with new depth information, our system continuously refines the trajectory to maintain safety and optimality. Both our planner and trajectory generator outperforms state-of-the-art methods in terms of computational efficiency and guarantee obstacle-free trajectories. We validate our system through robust autonomous flight experiments in diverse indoor and outdoor environments, demonstrating its effectiveness for safe navigation in previously unknown settings.
From Propeller Damage Estimation and Adaptation to Fault Tolerant Control: Enhancing Quadrotor Resilience
Oct 19, 2023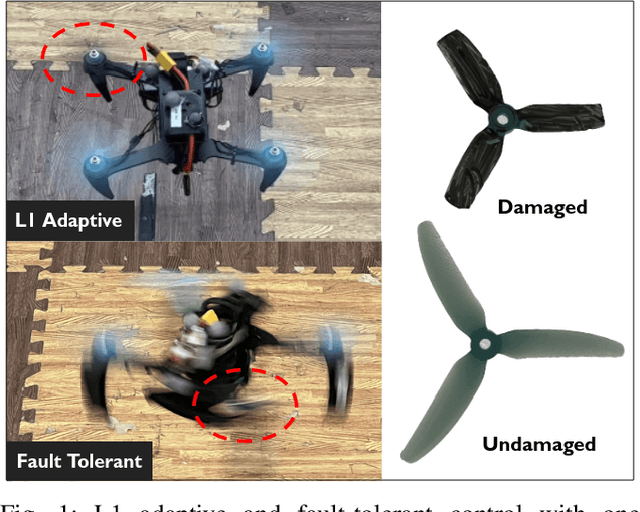
Aerial robots are required to remain operational even in the event of system disturbances, damages, or failures to ensure resilient and robust task completion and safety. One common failure case is propeller damage, which presents a significant challenge in both quantification and compensation. We propose a novel adaptive control scheme capable of detecting and compensating for multi-rotor propeller damages, ensuring safe and robust flight performances. Our control scheme includes an L1 adaptive controller for damage inference and compensation of single or dual propellers, with the capability to seamlessly transition to a fault-tolerant solution in case the damage becomes severe. We experimentally identify the conditions under which the L1 adaptive solution remains preferable over a fault-tolerant alternative. Experimental results validate the proposed approach, demonstrating its effectiveness in running the adaptive strategy in real time on a quadrotor even in case of damage to multiple propellers.
AutoCharge: Autonomous Charging for Perpetual Quadrotor Missions
Jun 08, 2023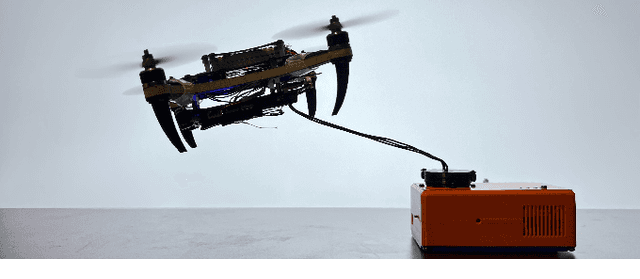
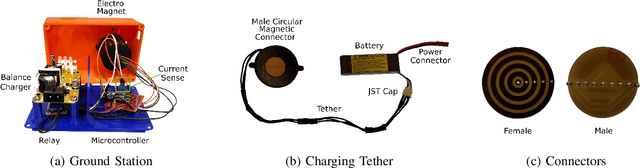
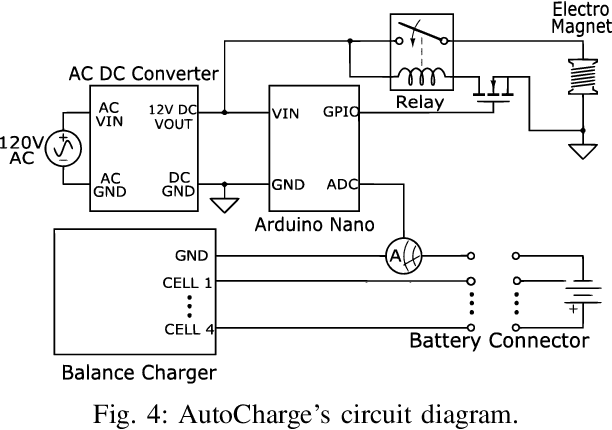
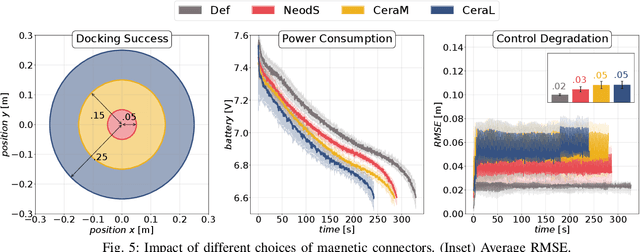
Battery endurance represents a key challenge for long-term autonomy and long-range operations, especially in the case of aerial robots. In this paper, we propose AutoCharge, an autonomous charging solution for quadrotors that combines a portable ground station with a flexible, lightweight charging tether and is capable of universal, highly efficient, and robust charging. We design and manufacture a pair of circular magnetic connectors to ensure a precise orientation-agnostic electrical connection between the ground station and the charging tether. Moreover, we supply the ground station with an electromagnet that largely increases the tolerance to localization and control errors during the docking maneuver, while still guaranteeing smooth un-docking once the charging process is completed. We demonstrate AutoCharge on a perpetual 10 hours quadrotor flight experiment and show that the docking and un-docking performance is solidly repeatable, enabling perpetual quadrotor flight missions.
GaPT: Gaussian Process Toolkit for Online Regression with Application to Learning Quadrotor Dynamics
Mar 14, 2023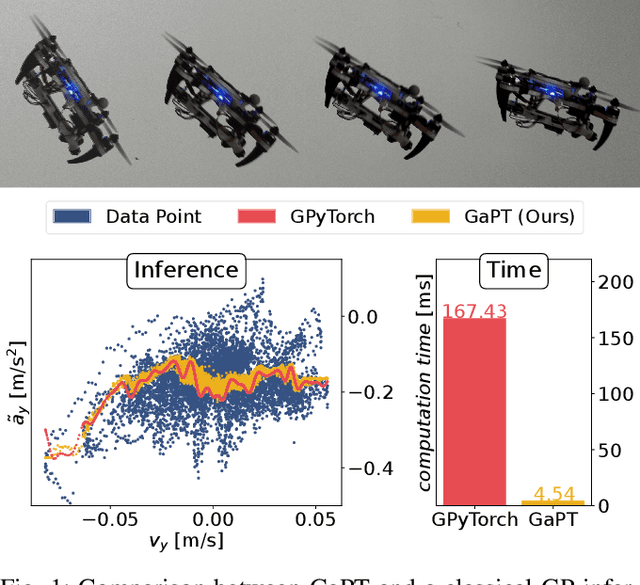
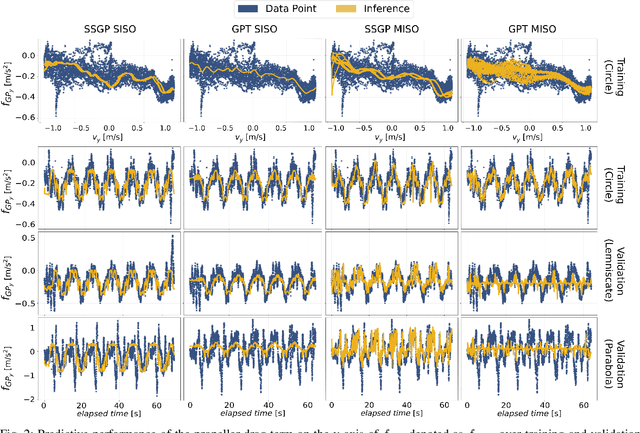
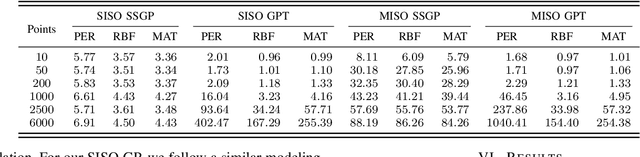
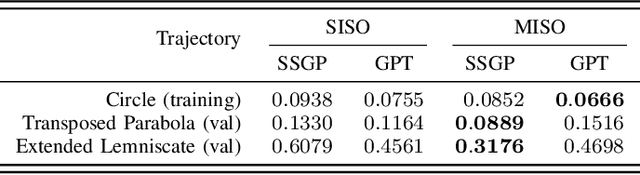
Gaussian Processes (GPs) are expressive models for capturing signal statistics and expressing prediction uncertainty. As a result, the robotics community has gathered interest in leveraging these methods for inference, planning, and control. Unfortunately, despite providing a closed-form inference solution, GPs are non-parametric models that typically scale cubically with the dataset size, hence making them difficult to be used especially on onboard Size, Weight, and Power (SWaP) constrained aerial robots. In addition, the integration of popular libraries with GPs for different kernels is not trivial. In this paper, we propose GaPT, a novel toolkit that converts GPs to their state space form and performs regression in linear time. GaPT is designed to be highly compatible with several optimizers popular in robotics. We thoroughly validate the proposed approach for learning quadrotor dynamics on both single and multiple input GP settings. GaPT accurately captures the system behavior in multiple flight regimes and operating conditions, including those producing highly nonlinear effects such as aerodynamic forces and rotor interactions. Moreover, the results demonstrate the superior computational performance of GaPT compared to a classical GP inference approach on both single and multi-input settings especially when considering large number of data points, enabling real-time regression speed on embedded platforms used on SWaP-constrained aerial robots.
Robust Active Visual Perching with Quadrotors on Inclined Surfaces
Apr 05, 2022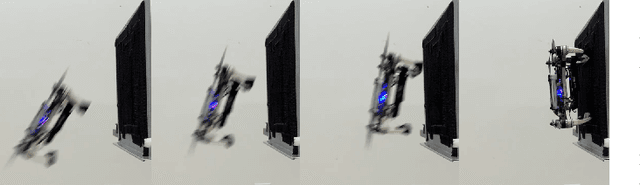
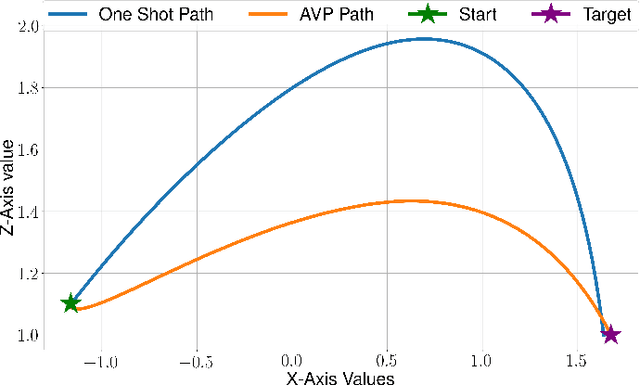
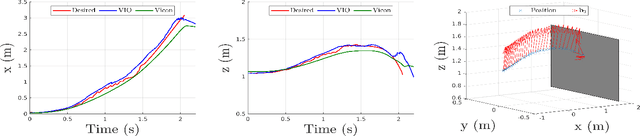
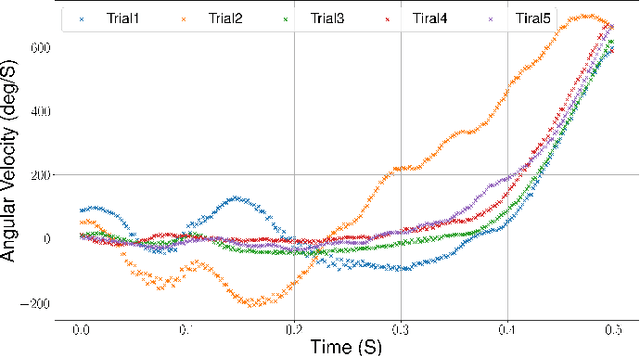
Autonomous Micro Aerial Vehicles are deployed for a variety tasks including surveillance and monitoring. Perching and staring allow the vehicle to monitor targets without flying, saving battery power and increasing the overall mission time without the need to frequently replace batteries. This paper addresses the Active Visual Perching (AVP) control problem to autonomously perch on inclined surfaces up to $90^\circ$. Our approach generates dynamically feasible trajectories to navigate and perch on a desired target location, while taking into account actuator and Field of View (FoV) constraints. By replanning in mid-flight, we take advantage of more accurate target localization increasing the perching maneuver's robustness to target localization or control errors. We leverage the Karush-Kuhn-Tucker (KKT) conditions to identify the compatibility between planning objectives and the visual sensing constraint during the planned maneuver. Furthermore, we experimentally identify the corresponding boundary conditions that maximizes the spatio-temporal target visibility during the perching maneuver. The proposed approach works on-board in real-time with significant computational constraints relying exclusively on cameras and an Inertial Measurement Unit (IMU). Experimental results validate the proposed approach and shows the higher success rate as well as increased target interception precision and accuracy with respect to a one-shot planning approach, while still retaining aggressive capabilities with flight envelopes that include large excursions from the hover position on inclined surfaces up to 90$^\circ$, angular speeds up to 750~deg/s, and accelerations up to 10~m/s$^2$.
Aggressive Visual Perching with Quadrotors on Inclined Surfaces
Jul 23, 2021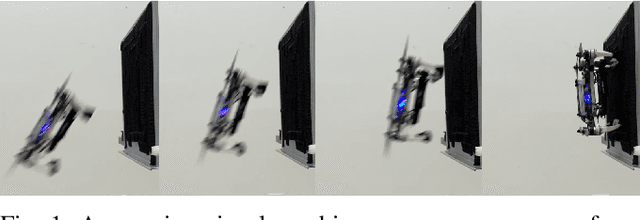
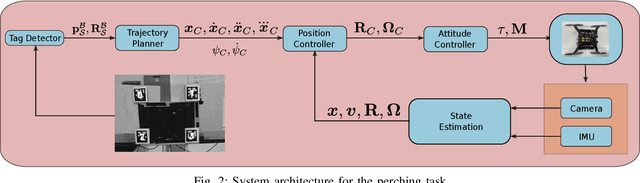
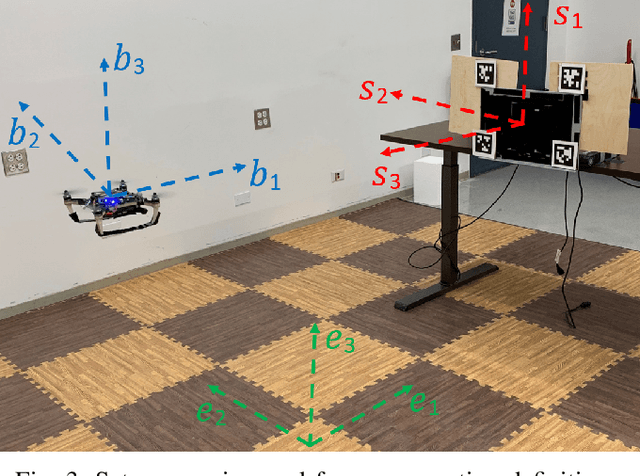
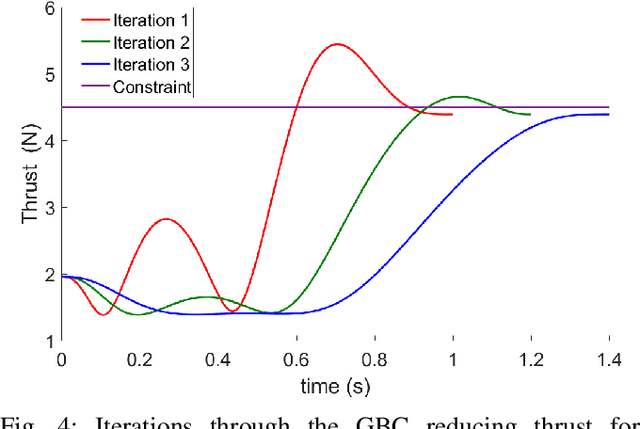
Autonomous Micro Aerial Vehicles (MAVs) have the potential to be employed for surveillance and monitoring tasks. By perching and staring on one or multiple locations aerial robots can save energy while concurrently increasing their overall mission time without actively flying. In this paper, we address the estimation, planning, and control problems for autonomous perching on inclined surfaces with small quadrotors using visual and inertial sensing. We focus on planning and executing of dynamically feasible trajectories to navigate and perch to a desired target location with on board sensing and computation. Our planner also supports certain classes of nonlinear global constraints by leveraging an efficient algorithm that we have mathematically verified. The on board cameras and IMU are concurrently used for state estimation and to infer the relative robot/target localization. The proposed solution runs in real-time on board a limited computational unit. Experimental results validate the proposed approach by tackling aggressive perching maneuvers with flight envelopes that include large excursions from the hover position on inclined surfaces up to 90$^\circ$, angular rates up to 600~deg/s, and accelerations up to 10m/s^2.