 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutoCharge: Autonomous Charging for Perpetual Quadrotor Missions
Paper and Code
Jun 08, 2023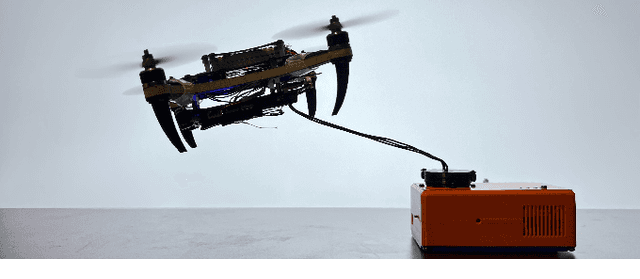
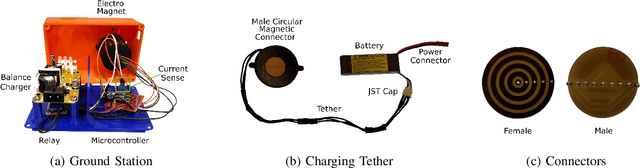
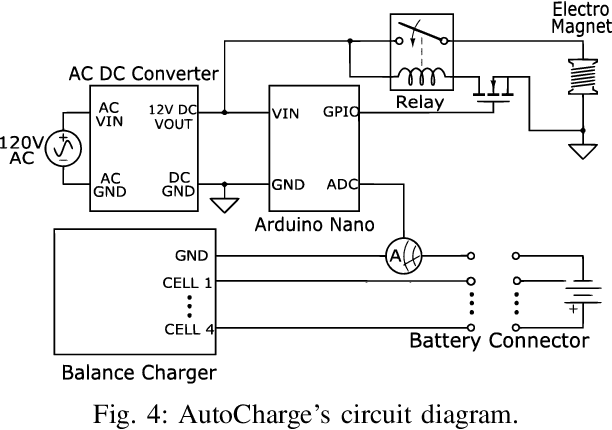
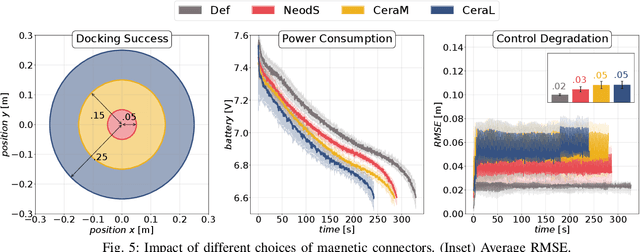
Battery endurance represents a key challenge for long-term autonomy and long-range operations, especially in the case of aerial robots. In this paper, we propose AutoCharge, an autonomous charging solution for quadrotors that combines a portable ground station with a flexible, lightweight charging tether and is capable of universal, highly efficient, and robust charging. We design and manufacture a pair of circular magnetic connectors to ensure a precise orientation-agnostic electrical connection between the ground station and the charging tether. Moreover, we supply the ground station with an electromagnet that largely increases the tolerance to localization and control errors during the docking maneuver, while still guaranteeing smooth un-docking once the charging process is completed. We demonstrate AutoCharge on a perpetual 10 hours quadrotor flight experiment and show that the docking and un-docking performance is solidly repeatable, enabling perpetual quadrotor flight missions.