 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnifying Foundation Models with Quadrotor Control for Visual Tracking Beyond Object Categories
Oct 17, 2023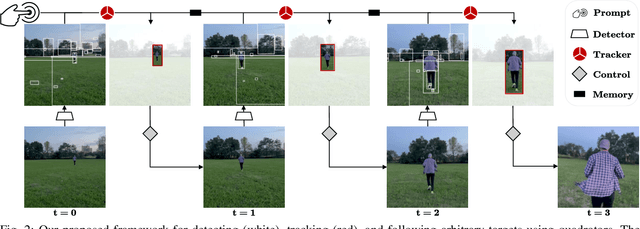
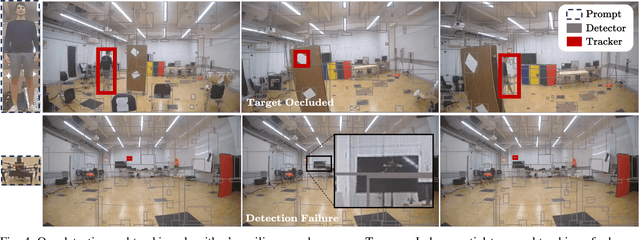


Visual control enables quadrotors to adaptively navigate using real-time sensory data, bridging perception with action. Yet, challenges persist, including generalization across scenarios, maintaining reliability, and ensuring real-time responsiveness. This paper introduces a perception framework grounded in foundation models for universal object detection and tracking, moving beyond specific training categories. Integral to our approach is a multi-layered tracker integrated with the foundation detector, ensuring continuous target visibility, even when faced with motion blur, abrupt light shifts, and occlusions. Complementing this, we introduce a model-free controller tailored for resilient quadrotor visual tracking. Our system operates efficiently on limited hardware, relying solely on an onboard camera and an inertial measurement unit. Through extensive validation in diverse challenging indoor and outdoor environments, we demonstrate our system's effectiveness and adaptability. In conclusion, our research represents a step forward in quadrotor visual tracking, moving from task-specific methods to more versatile and adaptable operations.
AutoCharge: Autonomous Charging for Perpetual Quadrotor Missions
Jun 08, 2023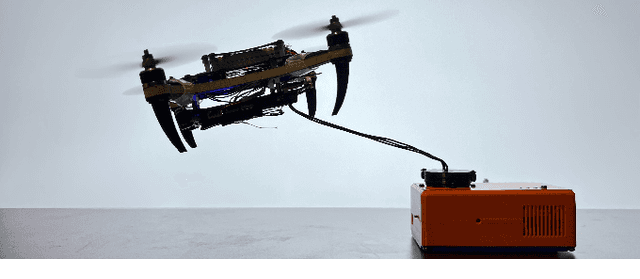
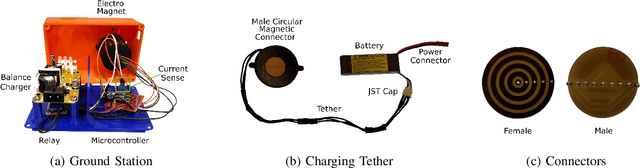
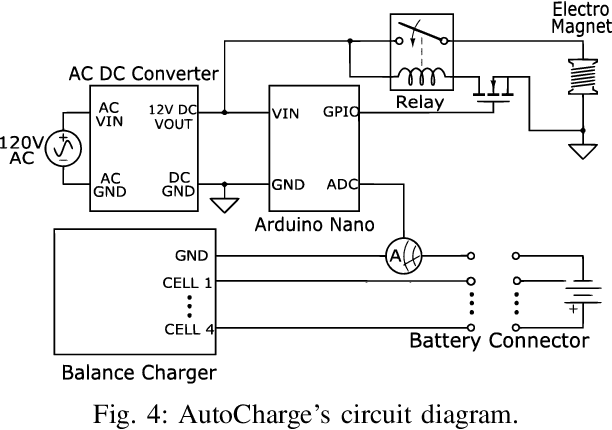
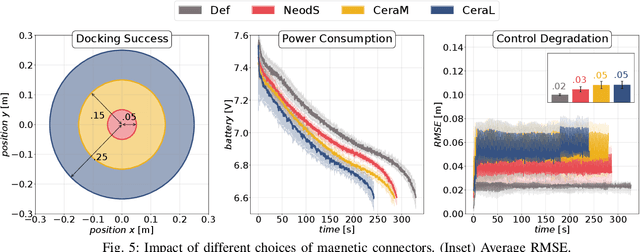
Battery endurance represents a key challenge for long-term autonomy and long-range operations, especially in the case of aerial robots. In this paper, we propose AutoCharge, an autonomous charging solution for quadrotors that combines a portable ground station with a flexible, lightweight charging tether and is capable of universal, highly efficient, and robust charging. We design and manufacture a pair of circular magnetic connectors to ensure a precise orientation-agnostic electrical connection between the ground station and the charging tether. Moreover, we supply the ground station with an electromagnet that largely increases the tolerance to localization and control errors during the docking maneuver, while still guaranteeing smooth un-docking once the charging process is completed. We demonstrate AutoCharge on a perpetual 10 hours quadrotor flight experiment and show that the docking and un-docking performance is solidly repeatable, enabling perpetual quadrotor flight missions.
Vision-based Relative Detection and Tracking for Teams of Micro Aerial Vehicles
Jul 17, 2022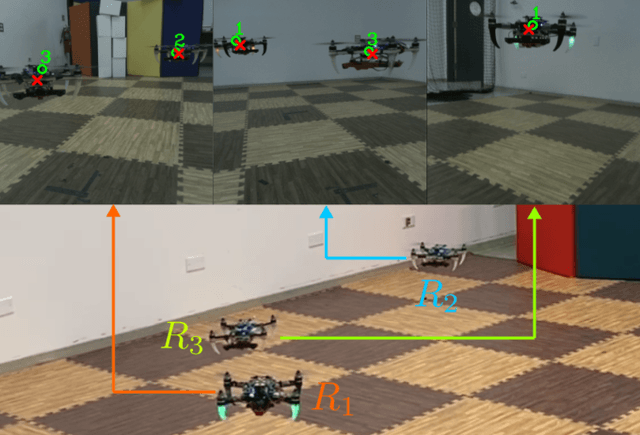
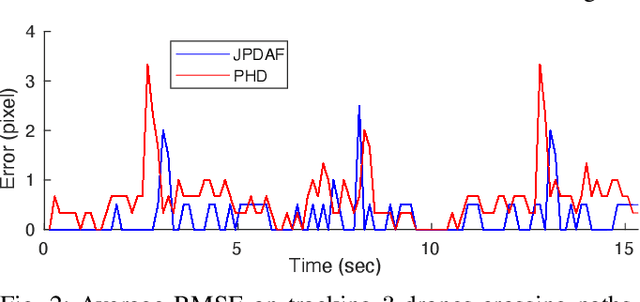
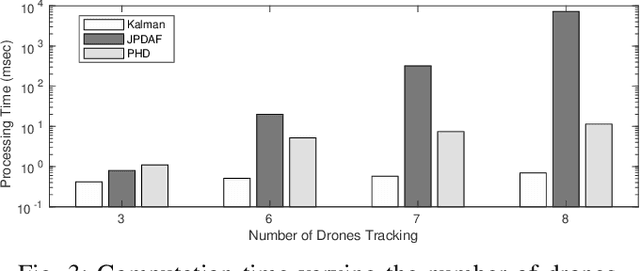
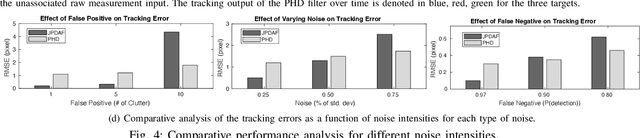
In this paper, we address the vision-based detection and tracking problems of multiple aerial vehicles using a single camera and Inertial Measurement Unit (IMU) as well as the corresponding perception consensus problem (i.e., uniqueness and identical IDs across all observing agents). We design several vision-based decentralized Bayesian multi-tracking filtering strategies to resolve the association between the incoming unsorted measurements obtained by a visual detector algorithm and the tracked agents. We compare their accuracy in different operating conditions as well as their scalability according to the number of agents in the team. This analysis provides useful insights about the most appropriate design choice for the given task. We further show that the proposed perception and inference pipeline which includes a Deep Neural Network (DNN) as visual target detector is lightweight and capable of concurrently running control and planning with Size, Weight, and Power (SWaP) constrained robots on-board. Experimental results show the effective tracking of multiple drones in various challenging scenarios such as heavy occlusions.