 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVBT-MPC: Vision-Based Tactile MPC for Contour Following
May 19, 2026Tactile sensing plays a key role in robotic manipulation, particularly in tasks like surface inspection. Successful execution requires maintaining contact while accurately tracking object contours. In this work, we propose a Vision-Based Tactile Model Predictive Control (VBT-MPC) framework for robotic contour following using a Vision-Based Tactile Sensor (VBTS) mounted in an eye-in-hand configuration. The proposed controller operates directly in contour features space, thereby avoiding the need for separate pose-estimation modules or complex force-control architectures. We further compare our VBT-MPC with visual-servoing strategies adapted to tactile features, and evaluate contour tracking on objects with diverse geometries and materials in both simulation and real-world experiments.
ES-HPC-MPC: Exponentially Stable Hybrid Perception Constrained MPC for Quadrotor with Suspended Payloads
Apr 10, 2025Aerial transportation using quadrotors with cable-suspended payloads holds great potential for applications in disaster response, logistics, and infrastructure maintenance. However, their hybrid and underactuated dynamics pose significant control and perception challenges. Traditional approaches often assume a taut cable condition, limiting their effectiveness in real-world applications where slack-to-taut transitions occur due to disturbances. We introduce ES-HPC-MPC, a model predictive control framework that enforces exponential stability and perception-constrained control under hybrid dynamics. Our method leverages Exponentially Stabilizing Control Lyapunov Functions (ES-CLFs) to enforce stability during the tasks and Control Barrier Functions (CBFs) to maintain the payload within the onboard camera's field of view (FoV). We validate our method through both simulation and real-world experiments, demonstrating stable trajectory tracking and reliable payload perception. We validate that our method maintains stability and satisfies perception constraints while tracking dynamically infeasible trajectories and when the system is subjected to hybrid mode transitions caused by unexpected disturbances.
Intuitive Human-Drone Collaborative Navigation in Unknown Environments through Mixed Reality
Apr 02, 2025Considering the widespread integration of aerial robots in inspection, search and rescue, and monitoring tasks, there is a growing demand to design intuitive human-drone interfaces. These aim to streamline and enhance the user interaction and collaboration process during drone navigation, ultimately expediting mission success and accommodating users' inputs. In this paper, we present a novel human-drone mixed reality interface that aims to (a) increase human-drone spatial awareness by sharing relevant spatial information and representations between the human equipped with a Head Mounted Display (HMD) and the robot and (b) enable safer and intuitive human-drone interactive and collaborative navigation in unknown environments beyond the simple command and control or teleoperation paradigm. We validate our framework through extensive user studies and experiments in a simulated post-disaster scenarios, comparing its performance against a traditional First-Person View (FPV) control systems. Furthermore, multiple tests on several users underscore the advantages of the proposed solution, which offers intuitive and natural interaction with the system. This demonstrates the solution's ability to assist humans during a drone navigation mission, ensuring its safe and effective execution.
* Approved at ICUAS 25
Optimal Trajectory Planning for Cooperative Manipulation with Multiple Quadrotors Using Control Barrier Functions
Mar 04, 2025



In this paper, we present a novel trajectory planning algorithm for cooperative manipulation with multiple quadrotors using control barrier functions (CBFs). Our approach addresses the complex dynamics of a system in which a team of quadrotors transports and manipulates a cable-suspended rigid-body payload in environments cluttered with obstacles. The proposed algorithm ensures obstacle avoidance for the entire system, including the quadrotors, cables, and the payload in all six degrees of freedom (DoF). We introduce the use of CBFs to enable safe and smooth maneuvers, effectively navigating through cluttered environments while accommodating the system's nonlinear dynamics. To simplify complex constraints, the system components are modeled as convex polytopes, and the Duality theorem is employed to reduce the computational complexity of the optimization problem. We validate the performance of our planning approach both in simulation and real-world environments using multiple quadrotors. The results demonstrate the effectiveness of the proposed approach in achieving obstacle avoidance and safe trajectory generation for cooperative transportation tasks.
HPA-MPC: Hybrid Perception-Aware Nonlinear Model Predictive Control for Quadrotors with Suspended Loads
Nov 18, 2024Quadrotors equipped with cable-suspended loads represent a versatile, low-cost, and energy efficient solution for aerial transportation, construction, and manipulation tasks. However, their real-world deployment is hindered by several challenges. The system is difficult to control because it is nonlinear, underactuated, involves hybrid dynamics due to slack-taut cable modes, and evolves on complex configuration spaces. Additionally, it is crucial to estimate the full state and the cable's mode transitions in real-time using on-board sensors and computation. To address these challenges, we present a novel Hybrid Perception-Aware Nonlinear Model Predictive Control (HPA-MPC) control approach for quadrotors with suspended loads. Our method considers the complete hybrid system dynamics and includes a perception-aware cost to ensure the payload remains visible in the robot's camera during navigation. Furthermore, the full state and hybrid dynamics' transitions are estimated using onboard sensors. Experimental results demonstrate that our approach enables stable load tracking control, even during slack-taut transitions, and operates entirely onboard. The experiments also show that the perception-aware term effectively keeps the payload in the robot's camera field of view when a human operator interacts with the load.
DualQuat-LOAM: LiDAR Odometry and Mapping parametrized on Dual Quaternions
Oct 17, 2024


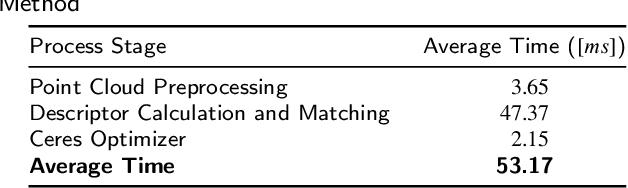
This paper reports on a novel method for LiDAR odometry estimation, which completely parameterizes the system with dual quaternions. To accomplish this, the features derived from the point cloud, including edges, surfaces, and Stable Triangle Descriptor (STD), along with the optimization problem, are expressed in the dual quaternion set. This approach enables the direct combination of translation and orientation errors via dual quaternion operations, greatly enhancing pose estimation, as demonstrated in comparative experiments against other state-of-the-art methods. Our approach reduced drift error compared to other LiDAR-only-odometry methods, especially in scenarios with sharp curves and aggressive movements with large angular displacement. DualQuat-LOAM is benchmarked against several public datasets. In the KITTI dataset it has a translation and rotation error of 0.79% and 0.0039{\deg}/m, with an average run time of 53 ms.
Decentralized Nonlinear Model Predictive Control for Safe Collision Avoidance in Quadrotor Teams with Limited Detection Range
Sep 25, 2024Multi-quadrotor systems face significant challenges in decentralized control, particularly with safety and coordination under sensing and communication limitations. State-of-the-art methods leverage Control Barrier Functions (CBFs) to provide safety guarantees but often neglect actuation constraints and limited detection range. To address these gaps, we propose a novel decentralized Nonlinear Model Predictive Control (NMPC) that integrates Exponential CBFs (ECBFs) to enhance safety and optimality in multi-quadrotor systems. We provide both conservative and practical minimum bounds of the range that preserve the safety guarantees of the ECBFs. We validate our approach through extensive simulations with up to 10 quadrotors and 20 obstacles, as well as real-world experiments with 3 quadrotors. Results demonstrate the effectiveness of the proposed framework in realistic settings, highlighting its potential for reliable quadrotor teams operations.
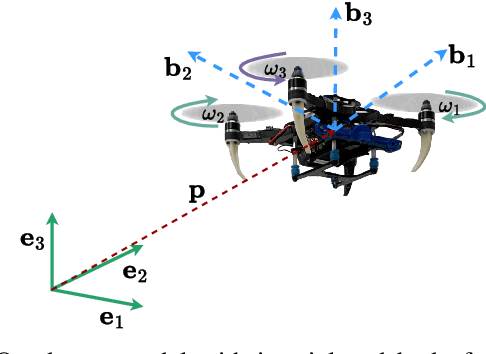
Experimental System Design of an Active Fault-Tolerant Quadrotor
Apr 09, 2024Quadrotors have gained popularity over the last decade, aiding humans in complex tasks such as search and rescue, mapping and exploration. Despite their mechanical simplicity and versatility compared to other types of aerial vehicles, they remain vulnerable to rotor failures. In this paper, we propose an algorithmic and mechanical approach to addressing the quadrotor fault-tolerant problem in case of rotor failures. First, we present a fault-tolerant detection and control scheme that includes various attitude error metrics. The scheme transitions to a fault-tolerant control mode by surrendering the yaw control. Subsequently, to ensure compatibility with platform sensing constraints, we investigate the relationship between variations in robot rotational drag, achieved through a modular mechanical design appendage, resulting in yaw rates within sensor limits. This analysis offers a platform-agnostic framework for designing more reliable and robust quadrotors in the event of rotor failures. Extensive experimental results validate the proposed approach providing insights into successfully designing a cost-effective quadrotor capable of fault-tolerant control. The overall design enhances safety in scenarios of faulty rotors, without the need for additional sensors or computational resources.
Geometric Fault-Tolerant Control of Quadrotors in Case of Rotor Failures: An Attitude Based Comparative Study
Jun 23, 2023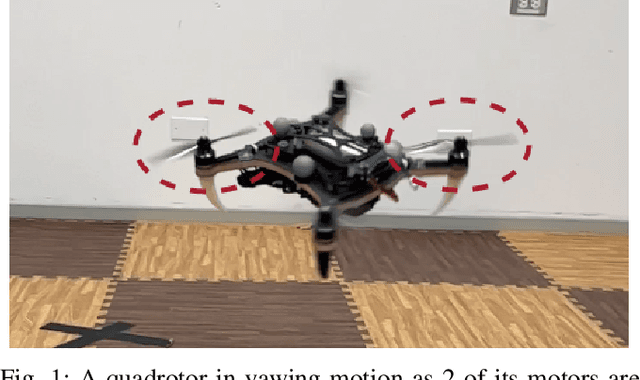

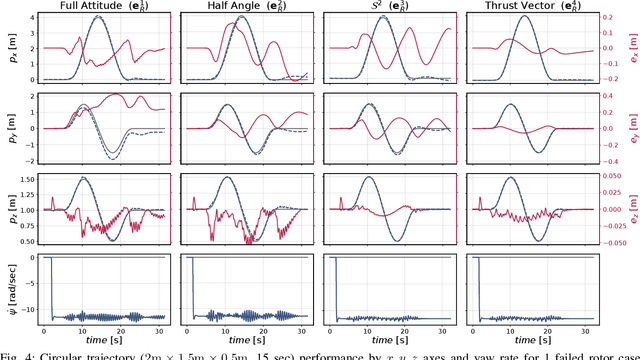
The ability of aerial robots to operate in the presence of failures is crucial in various applications that demand continuous operations, such as surveillance, monitoring, and inspection. In this paper, we propose a fault-tolerant control strategy for quadrotors that can adapt to single and dual complete rotor failures. Our approach augments a classic geometric tracking controller on $SO(3)\times\mathbb{R}^3$ to accommodate the effects of rotor failures. We provide an in-depth analysis of several attitude error metrics to identify the most appropriate design choice for fault-tolerant control strategies. To assess the effectiveness of these metrics, we evaluate trajectory tracking accuracies. Simulation results demonstrate the performance of the proposed approach.
Nonlinear Model Predictive Control for Cooperative Transportation and Manipulation of Cable Suspended Payloads with Multiple Quadrotors
Mar 10, 2023Autonomous Micro Aerial Vehicles (MAVs) such as quadrotors equipped with manipulation mechanisms have the potential to assist humans in tasks such as construction and package delivery. Cables are a promising option for manipulation mechanisms due to their low weight, low cost, and simple design. However, designing control and planning strategies for cable mechanisms presents challenges due to indirect load actuation, nonlinear configuration space, and highly coupled system dynamics. In this paper, we propose a novel Nonlinear Model Predictive Control (NMPC) method that enables a team of quadrotors to manipulate a rigid-body payload in all 6 degrees of freedom via suspended cables. Our approach can concurrently exploit, as part of the receding horizon optimization, the available mechanical system redundancies to perform additional tasks such as inter-robot separation and obstacle avoidance while respecting payload dynamics and actuator constraints. To address real-time computational requirements and scalability, we employ a lightweight state vector parametrization that includes only payload states in all six degrees of freedom. This also enables the planning of trajectories on the $SE(3)$ manifold load configuration space, thereby also reducing planning complexity. We validate the proposed approach through simulation and real-world experiments.