 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDualQuat-LOAM: LiDAR Odometry and Mapping parametrized on Dual Quaternions
Paper and Code
Oct 17, 2024


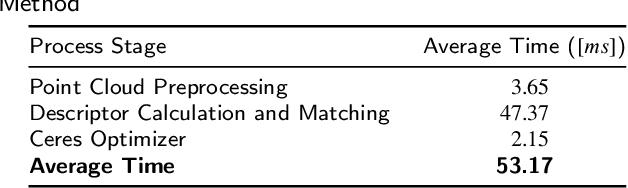
This paper reports on a novel method for LiDAR odometry estimation, which completely parameterizes the system with dual quaternions. To accomplish this, the features derived from the point cloud, including edges, surfaces, and Stable Triangle Descriptor (STD), along with the optimization problem, are expressed in the dual quaternion set. This approach enables the direct combination of translation and orientation errors via dual quaternion operations, greatly enhancing pose estimation, as demonstrated in comparative experiments against other state-of-the-art methods. Our approach reduced drift error compared to other LiDAR-only-odometry methods, especially in scenarios with sharp curves and aggressive movements with large angular displacement. DualQuat-LOAM is benchmarked against several public datasets. In the KITTI dataset it has a translation and rotation error of 0.79% and 0.0039{\deg}/m, with an average run time of 53 ms.