 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeES-HPC-MPC: Exponentially Stable Hybrid Perception Constrained MPC for Quadrotor with Suspended Payloads
Apr 10, 2025Aerial transportation using quadrotors with cable-suspended payloads holds great potential for applications in disaster response, logistics, and infrastructure maintenance. However, their hybrid and underactuated dynamics pose significant control and perception challenges. Traditional approaches often assume a taut cable condition, limiting their effectiveness in real-world applications where slack-to-taut transitions occur due to disturbances. We introduce ES-HPC-MPC, a model predictive control framework that enforces exponential stability and perception-constrained control under hybrid dynamics. Our method leverages Exponentially Stabilizing Control Lyapunov Functions (ES-CLFs) to enforce stability during the tasks and Control Barrier Functions (CBFs) to maintain the payload within the onboard camera's field of view (FoV). We validate our method through both simulation and real-world experiments, demonstrating stable trajectory tracking and reliable payload perception. We validate that our method maintains stability and satisfies perception constraints while tracking dynamically infeasible trajectories and when the system is subjected to hybrid mode transitions caused by unexpected disturbances.
DualQuat-LOAM: LiDAR Odometry and Mapping parametrized on Dual Quaternions
Oct 17, 2024


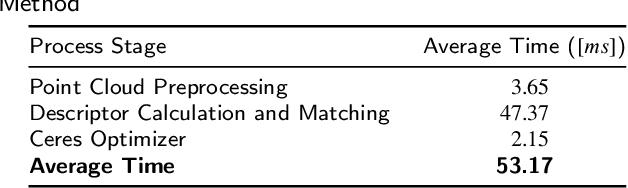
This paper reports on a novel method for LiDAR odometry estimation, which completely parameterizes the system with dual quaternions. To accomplish this, the features derived from the point cloud, including edges, surfaces, and Stable Triangle Descriptor (STD), along with the optimization problem, are expressed in the dual quaternion set. This approach enables the direct combination of translation and orientation errors via dual quaternion operations, greatly enhancing pose estimation, as demonstrated in comparative experiments against other state-of-the-art methods. Our approach reduced drift error compared to other LiDAR-only-odometry methods, especially in scenarios with sharp curves and aggressive movements with large angular displacement. DualQuat-LOAM is benchmarked against several public datasets. In the KITTI dataset it has a translation and rotation error of 0.79% and 0.0039{\deg}/m, with an average run time of 53 ms.
Visual Servoing NMPC Applied to UAVs for Photovoltaic Array Inspection
Nov 14, 2023The photovoltaic (PV) industry is seeing a significant shift toward large-scale solar plants, where traditional inspection methods have proven to be time-consuming and costly. Currently, the predominant approach to PV inspection using unmanned aerial vehicles (UAVs) is based on photogrammetry. However, the photogrammetry approach presents limitations, such as an increased amount of useless data during flights, potential issues related to image resolution, and the detection process during high-altitude flights. In this work, we develop a visual servoing control system applied to a UAV with dynamic compensation using a nonlinear model predictive control (NMPC) capable of accurately tracking the middle of the underlying PV array at different frontal velocities and height constraints, ensuring the acquisition of detailed images during low-altitude flights. The visual servoing controller is based on the extraction of features using RGB-D images and the Kalman filter to estimate the edges of the PV arrays. Furthermore, this work demonstrates the proposal in both simulated and real-world environments using the commercial aerial vehicle (DJI Matrice 100), with the purpose of showcasing the results of the architecture. Our approach is available for the scientific community in: https://github.com/EPVelasco/VisualServoing_NMPC