 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Servoing NMPC Applied to UAVs for Photovoltaic Array Inspection
Nov 14, 2023The photovoltaic (PV) industry is seeing a significant shift toward large-scale solar plants, where traditional inspection methods have proven to be time-consuming and costly. Currently, the predominant approach to PV inspection using unmanned aerial vehicles (UAVs) is based on photogrammetry. However, the photogrammetry approach presents limitations, such as an increased amount of useless data during flights, potential issues related to image resolution, and the detection process during high-altitude flights. In this work, we develop a visual servoing control system applied to a UAV with dynamic compensation using a nonlinear model predictive control (NMPC) capable of accurately tracking the middle of the underlying PV array at different frontal velocities and height constraints, ensuring the acquisition of detailed images during low-altitude flights. The visual servoing controller is based on the extraction of features using RGB-D images and the Kalman filter to estimate the edges of the PV arrays. Furthermore, this work demonstrates the proposal in both simulated and real-world environments using the commercial aerial vehicle (DJI Matrice 100), with the purpose of showcasing the results of the architecture. Our approach is available for the scientific community in: https://github.com/EPVelasco/VisualServoing_NMPC
LiLO: Lightweight and low-bias LiDAR Odometry method based on spherical range image filtering
Nov 13, 2023In unstructured outdoor environments, robotics requires accurate and efficient odometry with low computational time. Existing low-bias LiDAR odometry methods are often computationally expensive. To address this problem, we present a lightweight LiDAR odometry method that converts unorganized point cloud data into a spherical range image (SRI) and filters out surface, edge, and ground features in the image plane. This substantially reduces computation time and the required features for odometry estimation in LOAM-based algorithms. Our odometry estimation method does not rely on global maps or loop closure algorithms, which further reduces computational costs. Experimental results generate a translation and rotation error of 0.86\% and 0.0036{\deg}/m on the KITTI dataset with an average runtime of 78ms. In addition, we tested the method with our data, obtaining an average closed-loop error of 0.8m and a runtime of 27ms over eight loops covering 3.5Km.
ViKi-HyCo: A Hybrid-Control approach for complex car-like maneuvers
Nov 13, 2023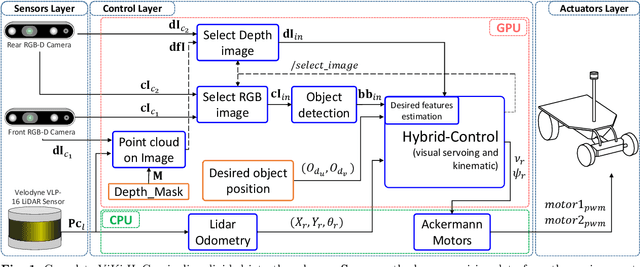

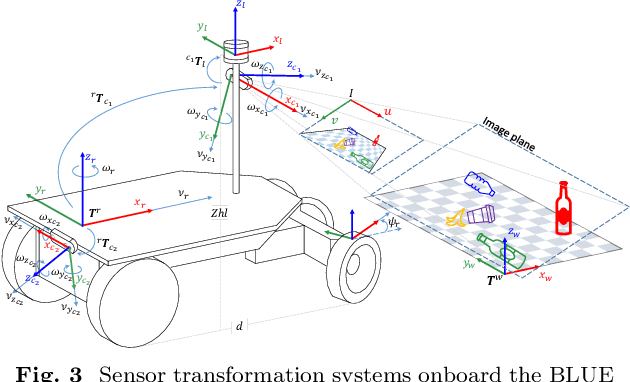
This paper presents ViKi-HyCo (Visual servoing and Kinematic Hybrid-Controller), an approach that generates the necessary maneuvers for the complex positioning of a non-holonomic mobile robot in outdoor environments, towards a target point based on the object detection, by combining an image based visual servoing (IBVS) and a kinematic controller. The method avoids the problems of the visual servoing controller when it loses the visual object detection features by switching to a kinematic controller. We also present object localization for outdoor environments employing the fusion of LiDAR and RGB-D cameras that estimates the spatial location of a target point for the kinematic controller, and also allows the dynamic calculation of a desired bounding box of the detected object for the calculation of velocities in the visual servoing controller. The presented approach does not require an object tracking algorithm and is applicable to any visually tracking robotic task where its kinematic model is known. The Hybrid-Control presents an error of 0.0428 \pm 0.0467 m in the X-axis and 0.0515 \pm 0.0323 m in the Y-axis at the end of a complete positioning task.
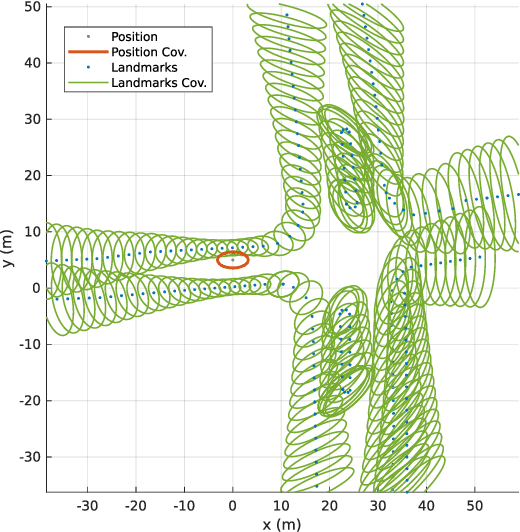
Dynamically Weighted Factor-Graph for Feature-based Geo-localization
Nov 13, 2023Feature-based geo-localization relies on associating features extracted from aerial imagery with those detected by the vehicle's sensors. This requires that the type of landmarks must be observable from both sources. This no-variety of feature types generates poor representations that lead to outliers and deviations, produced by ambiguities and lack of detections respectively. To mitigate these drawbacks, in this paper, we present a dynamically weighted factor graph model for the vehicle's trajectory estimation. The weight adjustment in this implementation depends on information quantification in the detections performed using a LiDAR sensor. Also, a prior (GNSS-based) error estimation is included in the model. Then, when the representation becomes ambiguous or sparse, the weights are dynamically adjusted to rely on the corrected prior trajectory, mitigating in this way outliers and deviations. We compare our method against state-of-the-art geo-localization ones in a challenging ambiguous environment, where we also cause detection losses. We demonstrate mitigation of the mentioned drawbacks where the other methods fail.
Detection and depth estimation for domestic waste in outdoor environments by sensors fusion
Nov 08, 2022In this work, we estimate the depth in which domestic waste are located in space from a mobile robot in outdoor scenarios. As we are doing this calculus on a broad range of space (0.3 - 6.0 m), we use RGB-D camera and LiDAR fusion. With this aim and range, we compare several methods such as average, nearest, median and center point, applied to those which are inside a reduced or non-reduced Bounding Box (BB). These BB are obtained from segmentation and detection methods which are representative of these techniques like Yolact, SOLO, You Only Look Once (YOLO)v5, YOLOv6 and YOLOv7. Results shown that, applying a detection method with the average technique and a reduction of BB of 40%, returns the same output as segmenting the object and applying the average method. Indeed, the detection method is faster and lighter in comparison with the segmentation one. The committed median error in the conducted experiments was 0.0298 ${\pm}$ 0.0544 m.
Robust Self-Tuning Data Association for Geo-Referencing Using Lane Markings
Jul 28, 2022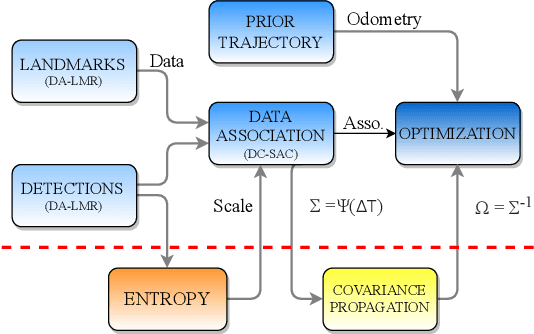
Localization in aerial imagery-based maps offers many advantages, such as global consistency, geo-referenced maps, and the availability of publicly accessible data. However, the landmarks that can be observed from both aerial imagery and on-board sensors is limited. This leads to ambiguities or aliasing during the data association. Building upon a highly informative representation (that allows efficient data association), this paper presents a complete pipeline for resolving these ambiguities. Its core is a robust self-tuning data association that adapts the search area depending on the entropy of the measurements. Additionally, to smooth the final result, we adjust the information matrix for the associated data as a function of the relative transform produced by the data association process. We evaluate our method on real data from urban and rural scenarios around the city of Karlsruhe in Germany. We compare state-of-the-art outlier mitigation methods with our self-tuning approach, demonstrating a considerable improvement, especially for outer-urban scenarios.
Path Planning With Naive-Valley-Path Obstacle Avoidance and Global Map-Free
Aug 20, 2021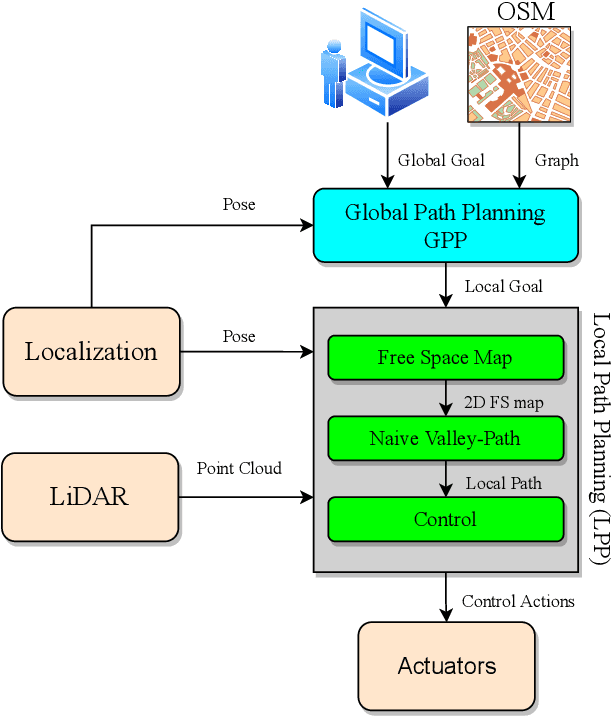
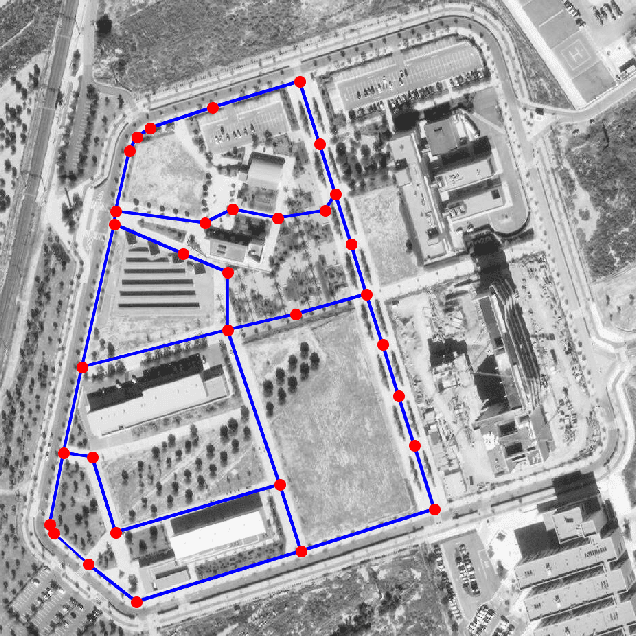
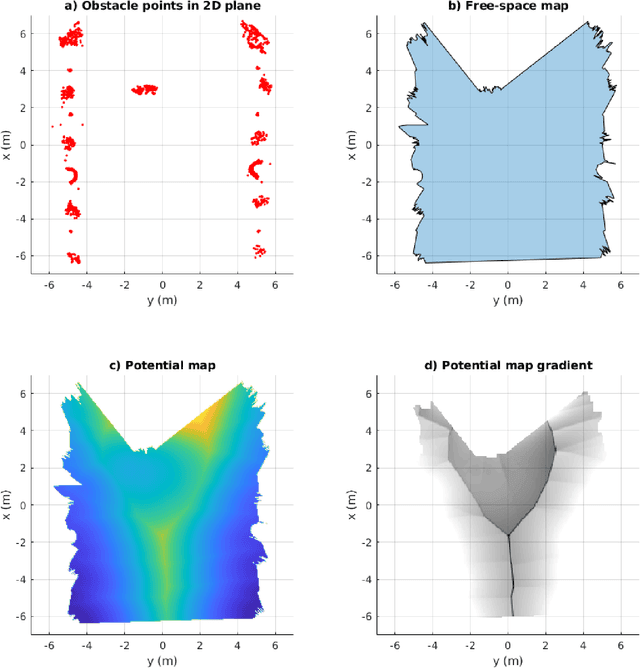
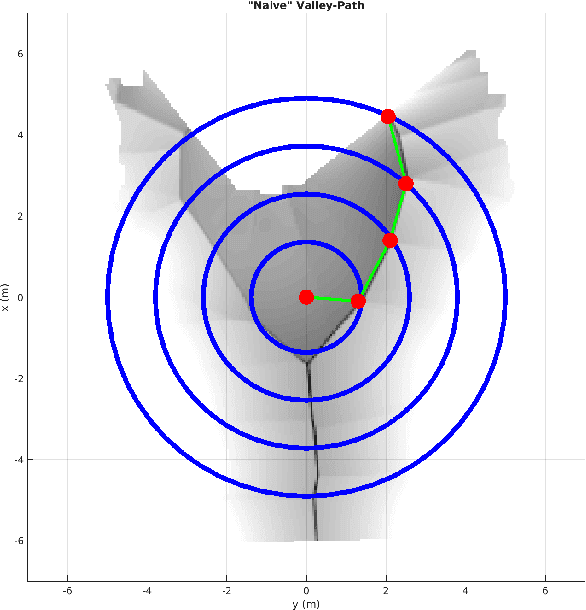
In this paper, we present a complete Path Planning approach divided into two main categories: Global Path Planning (GPP) and Local Path Planning (LPP). Unlike most other works, the GPP layer, instead of complex and heavy maps, uses road and intersections graphs obtained directly from internet applications like OpenStreetMaps (OSM). This map-free GPP frees us from the common area-size restrictions. In the LPP layer, we use a novel Naive-Valley-Path method (NVP) to generate a local path avoiding obstacles in the road in an extremely-low execution time period. This approach exploits the concept of valley areas around local minima, i.e., the ones always away from obstacles. We demonstrate the robustness of the system in our research platform BLUE, driving autonomously across the University of Alicante Scientific Park for more than 20 km in a 12.33 ha area. Our vehicle avoids different static persistent and non-persistent obstacles in the road and even dynamic ones, such as vehicles and pedestrians. Code is available at https://github.com/AUROVA-LAB/lib_planning.