 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeViKi-HyCo: A Hybrid-Control approach for complex car-like maneuvers
Paper and Code
Nov 13, 2023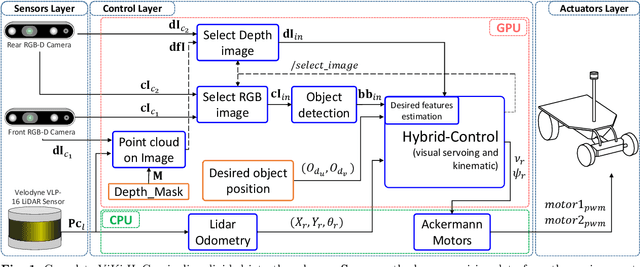

This paper presents ViKi-HyCo (Visual servoing and Kinematic Hybrid-Controller), an approach that generates the necessary maneuvers for the complex positioning of a non-holonomic mobile robot in outdoor environments, towards a target point based on the object detection, by combining an image based visual servoing (IBVS) and a kinematic controller. The method avoids the problems of the visual servoing controller when it loses the visual object detection features by switching to a kinematic controller. We also present object localization for outdoor environments employing the fusion of LiDAR and RGB-D cameras that estimates the spatial location of a target point for the kinematic controller, and also allows the dynamic calculation of a desired bounding box of the detected object for the calculation of velocities in the visual servoing controller. The presented approach does not require an object tracking algorithm and is applicable to any visually tracking robotic task where its kinematic model is known. The Hybrid-Control presents an error of 0.0428 \pm 0.0467 m in the X-axis and 0.0515 \pm 0.0323 m in the Y-axis at the end of a complete positioning task.